第一章 算法
1.1 算法的时间复杂度
-
时间复杂度的定义:
(1)时间复杂度表示为O(f(n)),随问题规模n的逐渐增大,算法时间的增长率和f(n)相同
(2)O(1):常数阶
(3)O(n):线性阶
(4)O((n^2)):平方介
(5)O((log_2n)):对数阶while(count < n){ //每次循环,count都会离n进一步,需要循环对数次 count = count*2; } -
推到O阶的方法
(1)用常数1取代运行时的所有加法
(2)修改后的运行次数函数中,只保留最高阶
(3)如果最高阶存在且不是1,则去除这个项相乘的常数。
上面三部得到的结果就是O的阶
(4)eg:如下例子的复杂度
当i=0时,内循环执行了n次;当n=1时,执行了n-1次,所以总次数为n+(n-1)+(n-2)+...+1 = (frac{1}{2}n^2+frac{1}{2}n) 。 因此时间复杂度为O((n^2))for(int i=0;i<n;i++){ for(j=i;j<n;j++){ /* 事件复杂度为O(1)的程序步骤 */ } }
(5)又一个例子
操作总次数=1+1+(frac{n(n+1)}{2}),所以时间复杂度为O((n^2))
```c
n++; /* 执行次数为1 */
fun(n); /* 执行次数为1 */
for(int i=0;i<n;i++){ /* 执行次数为如上面的例子 */
for(int j=i;j<n;j++){
/*时间复杂度为O(1)的操作*/
}
}
```
1.2 常用事件复杂度的比较
- 时间复杂度公式
(O(1) < O(logn) < O(n) < O(nlogn) < O(n^2) < O(n^3) < O(n!) < O(n^n))
第七章 图
7.1 概念
- 连通图:如果图中任意两点都有路径,则该图是连通图
- 若一个有向图恰有一个顶点的入度为0,其与定点入度为1,则是一颗有向树
7.2 图的物理存储结构
因为图的节点度数相差很大,按照度数最大的顶点设计节点结构会造成存储单元浪费;如果按照每个顶点自己的度数设计不同结构,又会带来操作的不便
一、邻接矩阵
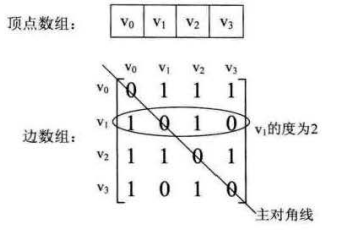
- 邻接矩阵存储使用2个数组存储图的信息:1个以为数组存储顶点,一个二维数组存储边的信息
(1)二维数组中的对角线为0,以为不存在顶点到自身的边
(2)要知道某个点的出度,就是顶点vi在第i行的元素之和,入度就是该顶点所在列的元素之和
(3)顶点vi的所有邻接点就是吧矩阵中第i行元素扫描一遍
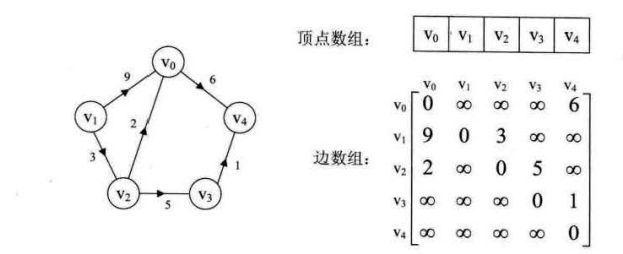
(4)对于有权值的网,二维数组中的元素不再是0,1表示是否存在边,而是把元素值表示为权值。不存在的边,权值记录为(infty);对角线上的权值为0.
- 邻接矩阵定义图
#include <stdio.h>
typedef char VertexType;
typedef int EdgeType;
#define MAXVEX 100
#define IUNFINITY 65535
typedef struct {
VertexType vexs[MAXVEX]; /* 顶点表*/
EdgeType arc[MAXVEX][MAXVEX]; /* 邻接矩阵 */
int vnum,edgenum; /*定点的个数和边的个数*/
}MGraphy;
void createGraphy(MGraphy *g){
printf("input vetex num and edge num
");
scanf("%d,%d",&g->vnum,&g->edgenum);
for (int i = 0; i < g->vnum ; i++) { // 输入顶点字符
printf("input %d vetex:",(i+1));
setbuf(stdin, NULL);
scanf("%c",&g->vexs[i]);
}
for(int i=0;i<g->vnum;i++){ // 初始化数组元素 Infonity
for(int j=0;j<g->vnum;j++){
g->arc[i][j] = IUNFINITY;
}
}
printf("input a,b,c represent corner mark and weight
");
for(int i=0;i<g->edgenum;i++){
int a,b,c=0;
printf("%d edge:",(i+1));
setbuf(stdin,NULL);
scanf("%d,%d,%d",&a,&b,&c);
g->arc[a][b] = c;
g->arc[b][a] = c; // 无向图增加这个
}
/* for(int i=0;i<g->vnum;i++){ // 初始化数组wei Infonity
for(int j=0;j<g->vnum;j++) {
printf("arr[%d][%d]=%d,,,",i,j,g->arc[i][j]);
}
}*/
}
int main() {
MGraphy g ;
createGraphy(&g);
}
二. 邻接表
- 邻接矩阵对于顶点多而边数少的稀疏图造成存储空间的大量浪费。正如线性表的预先分配可能造成存储空间浪费,因此引入链式存储结构。同样可以考虑用链表存储边或弧。
- 邻接表:数组 + 链表
(1)用的数组存储每个节点
(2)数组中的每个节点的所有邻接点组成一个链表(因为邻接点的个数不确定)。这个邻接表就是顶点的出度表。 - 邻接表关心了出度,但是查找入度就需要遍历整个图
- 代码
#include <stdio.h>
typedef char VertexType;
typedef int EdgeType;
#define MAXVEX 100
#define IUNFINITY 65535
typedef struct EdgeNode{ /* 边表结点 */
int adjvex; /* 邻接点域,该顶点对应的下标 */
EdgeType weight; /* 定点的权重 */
EdgeNode *next; /* 链,指向下一个邻接点 */
}EdgeNode;
typedef struct VertexNode{ /* 顶点表结点 */
VertexType data; /* 节点名字 */
EdgeNode *firstedge; /* 边表头节点 */
}VertexNode,AdjList[MAXVEX];
typedef struct{
AdjList adjList; /* 顶点表是一个结构体数组,数组中的元素是Vertex节点 */
int vnum,enumber; /* 图中当前顶点和边数 */
}GraphyAdjList;
/* 建立邻接表结构 */
void createGraphy(GraphyAdjList *g){
EdgeNode *e;
printf("输入顶点数和边数:
");
setbuf(stdin,NULL);
scanf("%d,%d",&g->vnum,g->enumber);
for (int i = 0; i < g->vnum; i++) {
printf("请输入第%d个节点名",(i+1));
setbuf(stdin,NULL);
scanf("%c",&g->adjList[i].data);
}
}
int main() {
MGraphy g ;
createGraphy(&g);
}