原创博客:转载请标明出处:http://www.cnblogs.com/zxouxuewei/
1,首先对于整体框架要搞明白,我们学东西不是为了看现象,是为了明白原理。如果没有一个全局的软件框架又怎么能做出创新的东西呢?其实这句话是在告诉我自己。
本次尝试也只会在/cmd_val话题中的z方向上有数据,所以机器人只能左右转。
2.其次就是运行你自己的机器人框架,实质上机器人需要订阅/cmd_val话题下的数据。通过串口下发给终端控制器解析后相应的移动机器人。具体实现可以看我前面的博文。
http://www.cnblogs.com/zxouxuewei/p/5352143.html
以下代码是我的机器人平台的tf_broadcaster_node.cpp节点,在此仅做参考:
#include <ros/ros.h>
#include <sensor_msgs/JointState.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
#include <iostream>
#include <iomanip>
#include <boost/asio.hpp>
#include <boost/bind.hpp>
#include <math.h>
#include "string.h"
using namespace std;
using namespace boost::asio;
double x = 0.0;
double y = 0.0;
double th = 0.0;
double vx = 0.0;
double vy = 0.0;
double vth = 0.0;
double dt = 0.0;
//Defines the packet protocol for communication between upper and lower computers
#pragma pack(1)
typedef union _Upload_speed_
{
unsigned char buffer[16];
struct _Speed_data_
{
float Header;
float X_speed;
float Y_speed;
float Z_speed;
}Upload_Speed;
}Struct_Union;
#pragma pack(4)
//Initializes the protocol packet data
Struct_Union Reciver_data = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
Struct_Union Transmission_data = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
//Defines the message type to be transmitted geometry_msgs
geometry_msgs::Quaternion odom_quat;
void cmd_velCallback(const geometry_msgs::Twist &twist_aux)
{
geometry_msgs::Twist twist = twist_aux;
Transmission_data.Upload_Speed.Header = header_data;
Transmission_data.Upload_Speed.X_speed = twist_aux.linear.x;
Transmission_data.Upload_Speed.Y_speed = twist_aux.linear.y;
Transmission_data.Upload_Speed.Z_speed = twist_aux.angular.z;
}
int main(int argc, char** argv)
{
unsigned char check_buf[1];
std::string usart_port,robot_frame_id,smoother_cmd_vel;
int baud_data;
float p,i,d;
ros::init(argc, argv, "base_controller");
ros::NodeHandle n;
ros::Time current_time, last_time;
//Gets the parameters in the launch file
ros::NodeHandle nh_private("~");
nh_private.param<std::string>("usart_port", usart_port, "/dev/robot_base");
nh_private.param<int>("baud_data", baud_data, 115200);
nh_private.param<std::string>("robot_frame_id", robot_frame_id, "base_link");
nh_private.param<std::string>("smoother_cmd_vel", smoother_cmd_vel, "/cmd_vel");
//Create a boot node for the underlying driver layer of the robot base_controller
ros::Subscriber cmd_vel_sub = n.subscribe(smoother_cmd_vel, 50, cmd_velCallback);
ros::Publisher odom_pub = n.advertise<nav_msgs::Odometry>("odom", 50);
tf::TransformBroadcaster odom_broadcaster;
//Initializes the data related to the boost serial port
io_service iosev;
serial_port sp(iosev, usart_port);
sp.set_option(serial_port::baud_rate(baud_data));
sp.set_option(serial_port::flow_control(serial_port::flow_control::none));
sp.set_option(serial_port::parity(serial_port::parity::none));
sp.set_option(serial_port::stop_bits(serial_port::stop_bits::one));
sp.set_option(serial_port::character_size(8));
while(ros::ok())
{
ros::spinOnce();
//Gets the cycle of two time slice rotations. The purpose is to calculate the odom message data
current_time = ros::Time::now();
dt = (current_time - last_time).toSec();
last_time = ros::Time::now();
//Read the data from the lower computer
read(sp, buffer(Reciver_data.buffer));
if(Reciver_data.Upload_Speed.Header > 15.4 && Reciver_data.Upload_Speed.Header < 15.6)
{
vx = Reciver_data.Upload_Speed.X_speed;
vy = Reciver_data.Upload_Speed.Y_speed;
vth = Reciver_data.Upload_Speed.Z_speed;
//ROS_INFO("%2f %2f %2f",vx,vy,vth);
}
else
{
//ROS_INFO("------Please wait while the robot is connected!-----");
read(sp, buffer(check_buf));
}
//Send the next bit machine under the cmd_val topic to monitor the speed information
write(sp, buffer(Transmission_data.buffer,16));
//Calculate odometer data
double delta_x = (vx * cos(th) - vy * sin(th)) * dt;
double delta_y = (vx * sin(th) + vy * cos(th)) * dt;
double delta_th = vth * dt;
x += delta_x;
y += delta_y;
th += delta_th;
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th);
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = robot_frame_id;
odom_trans.transform.translation.x = x;
odom_trans.transform.translation.y = y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
odom_broadcaster.sendTransform(odom_trans);
nav_msgs::Odometry odom;
odom.header.stamp = current_time;
odom.header.frame_id = "odom";
odom.pose.pose.position.x = x;
odom.pose.pose.position.y = y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
odom.child_frame_id = robot_frame_id;
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
//Release odometer data between odom-> base_link
odom_pub.publish(odom);
}
iosev.run();
}
我的机器人平台需要运行以下节点:
rosrun odom_tf_package tf_broadcaster_node
3.因为我们采用的RGB图像是来源于kinect,首先确保你的kinect相机驱动能正常启动:(如果你没有安装kinect深度相机驱动,请看我前面的博文。http://www.cnblogs.com/zxouxuewei/p/5271939.html)
roslaunch openni_launch openni.launch
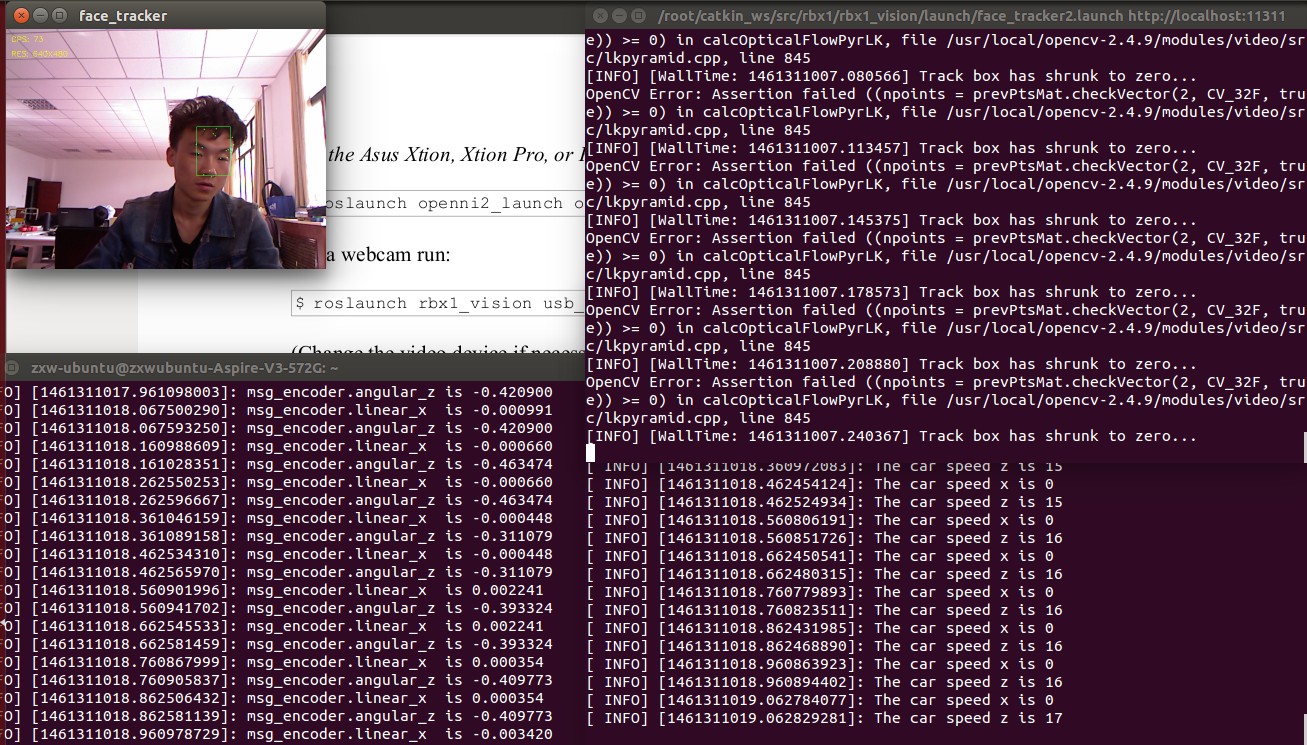
4.运行脸部跟踪器。
roslaunch rbx1_vision face_tracker2.launch
5.运行物体跟踪节点
roslaunch rbx1_apps object_tracker.launch
当然此时你可以查看/cmd_vel话题下的数据。
rostopic echo /cmd_vel
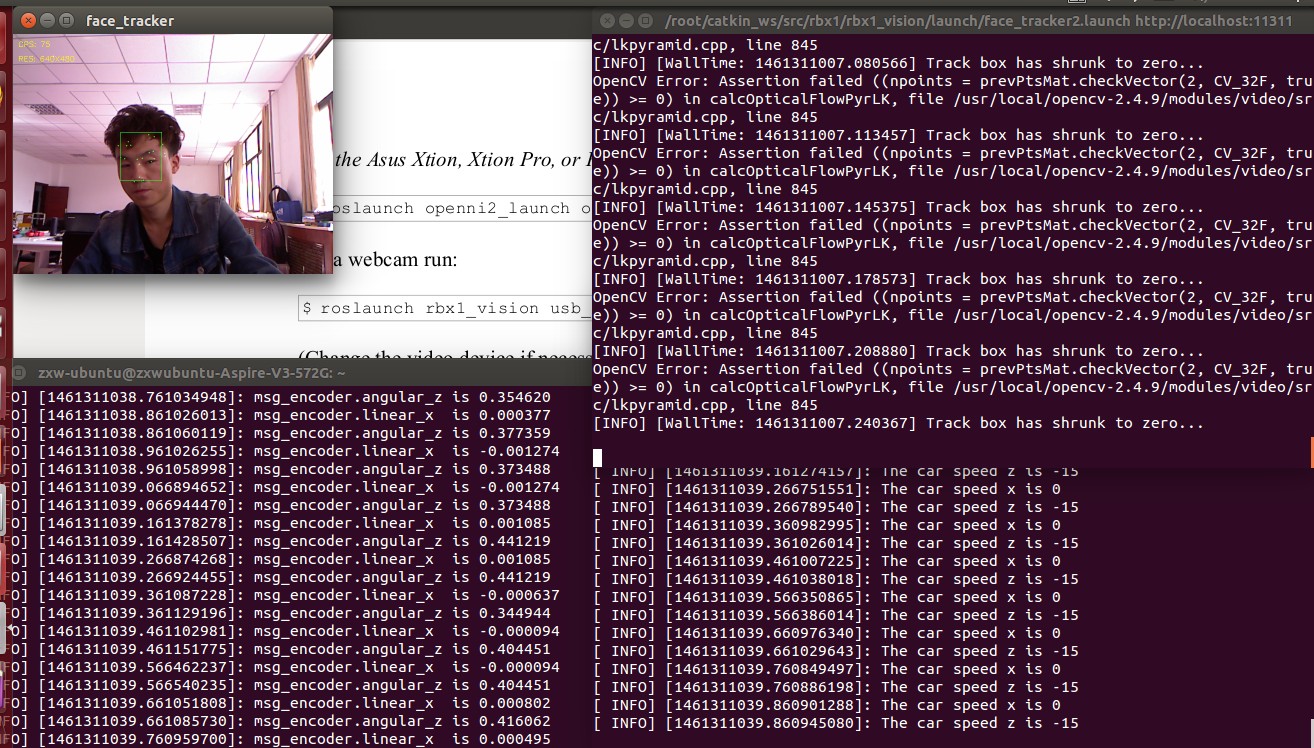
6.以下是我的测试结果:
显示msg_encoder.angular_z数据的终端是我监听的机器人编码器结算的速度信息,当然你的机器人也在做跟踪的效果。