注:本文写于早期学习摸索阶段,不免有错误、不到位的理解,仅用做遇到相同错误的人参考。后续一直在使用RBG大神的py-faster-rcnn。
既然faster-rcnn原版发表时候是matlab版代码,那就用matlab版代码吧!不过遇到的坑挺多的,不知道python版会不会好一点。
======= update =========
总体上包括这些步骤,请注意检查:
1 获取数据;(标准数据集/比赛数据/自行收集数据)
2 整理图片名和标注信息格式、指定训练集和测试集;(转voc格式,同时记得修改vocinit.m中类别信息;或者自己修改代码中读取数据的地方)
3 正确使用均值图像:手动算一个或用默认的减去128,别用错
4 选择网络与设定网络参数(solver和net);(根据业务需求和显存大小设定;修改网络中目标类别数量)
5 检查batch_size;
6 检查anchor;
7 清空cache目录;
8 开始训练;
9 确保电脑供电且不会休眠睡眠;
10 执行测试;整理测试结果
======= update =========
anyway,这里记录一下我遇到的几个错误和解决办法
这里假设你已经配置好了faster-rcnn。我是在win10下配置的,显卡GTX 970,使用ZF网络。
0. 准备数据集
官方训练时用的是voc2007系列数据,那就转换成这个系列的好了,主要包括:0.下载数据集 1.整理图片 2.xml格式的annotation文件 3.txt格式指定训练集、测试集、验证集、训练验证集,以及每个类别各自的这四种文件
0.0 下载数据集
看具体情况,比如做某个比赛,那就下载;如果是自己收集的数据集,那就统一放到一起
0.1 整理图片
主要是图片格式统一,比如都是png
以及,命名规范,比如统一是6位长度的数字:000001.png,并且序号是连续的
训练图片和测试图片都放在一个JPEGImages目录里
0.2 xml格式的annotation文件
其实voc2007这种方式:为每张图片编写一个xml文件,记录图片各种元信息(作者、文件名、宽度高度深度、来源),以及bounding box坐标信息(左上、右下定点)等,很蛋疼啊,图片多的话每次处理xml文件读写I/O就增大了。anyway,遵守标准的好处是省的自己造各种工具。
这里贴一个例子好了,000001.xml:
<annotation>
<folder>VOC2007</folder>
<filename>000001.png</filename>
<source>
<database>My Database</database>
<annotation>VOC2007</annotation>
<image>flickr</image>
<flickrid>NULL</flickrid>
</source>
<owner>
<flickrid>NULL</flickrid>
<name>chriszz</name>
</owner>
<size>
<width>1280</width>
<height>720</height>
<depth>3</depth>
</size>
<segmented>0</segmented>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>369</xmin>
<ymin>403</ymin>
<xmax>409</xmax>
<ymax>418</ymax>
</bndbox>
</object>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>434</xmin>
<ymin>375</ymin>
<xmax>443</xmax>
<ymax>401</ymax>
</bndbox>
</object>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>461</xmin>
<ymin>368</ymin>
<xmax>471</xmax>
<ymax>395</ymax>
</bndbox>
</object>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>571</xmin>
<ymin>473</ymin>
<xmax>593</xmax>
<ymax>490</ymax>
</bndbox>
</object>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>674</xmin>
<ymin>470</ymin>
<xmax>683</xmax>
<ymax>478</ymax>
</bndbox>
</object>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>693</xmin>
<ymin>471</ymin>
<xmax>714</xmax>
<ymax>480</ymax>
</bndbox>
</object>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>976</xmin>
<ymin>413</ymin>
<xmax>998</xmax>
<ymax>438</ymax>
</bndbox>
</object>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>1004</xmin>
<ymin>396</ymin>
<xmax>1011</xmax>
<ymax>410</ymax>
</bndbox>
</object>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>1024</xmin>
<ymin>388</ymin>
<xmax>1031</xmax>
<ymax>405</ymax>
</bndbox>
</object>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>1046</xmin>
<ymin>388</ymin>
<xmax>1071</xmax>
<ymax>406</ymax>
</bndbox>
</object>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>1114</xmin>
<ymin>390</ymin>
<xmax>1143</xmax>
<ymax>410</ymax>
</bndbox>
</object>
<object>
<name>sign</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>913</xmin>
<ymin>431</ymin>
<xmax>928</xmax>
<ymax>458</ymax>
</bndbox>
</object>
</annotation>
记得所有xml文件的文件名要和图片序号一一对应:000001.xml对应000001.png
并且,所有xml文件放到Annotations目录中
0.3 txt文件指定训练集、测试集等
在ImageSets/Main目录下保存这些文件。比如我的任务是检测交通标识,只有一个类别需要检测,或者说是二分类问题,只需要判断一个bbox区域是否为交通标识(sign),那么我创建sign对应的4个文件;以及4个表示总体的训练、验证、训练验证、测试的txt文件:
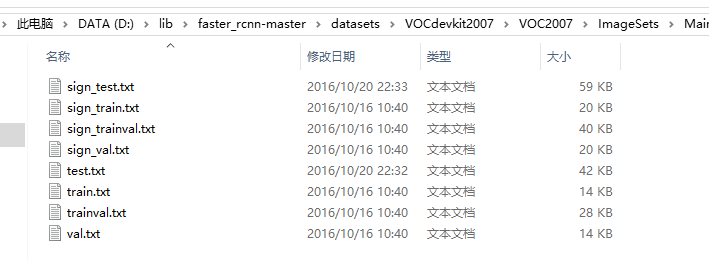
其中,sign_train、sign_test、sign_trainval、sign_val每行格式相同
图片id(不带后缀,不用全路径) +1或-1(表示这张图片中是否包含sign类别的区域)
对于我的情况,类别标签都是+1
然后是train、val、trainval、test文件,其中trainval是train和val的拼接。
这里我是需要
1 修改faster-rcnn的几个代码细节
1.0 experimentsscript_faster_rcnn_VOC2007_ZF.m第30、31行
这里默认居然是用select search生成region proposal,我也是醉了。
改成:
dataset = Dataset.voc2007_trainval(dataset, 'train', use_flipped);
dataset = Dataset.voc2007_test(dataset, 'test', false);
1.1 experiments+Datasetvoc2007_test.m第11行、第14行,test改成val
这个真的是太坑了,在这里我卡了大半天。为什么会卡在这个地方,然后程序一直运行出错呢?以及,程序出错大概如下:
错误使用 proposal_prepare_image_roidb>scale_rois (line 110) 两个输入数组的单一维度必须相互匹配,...
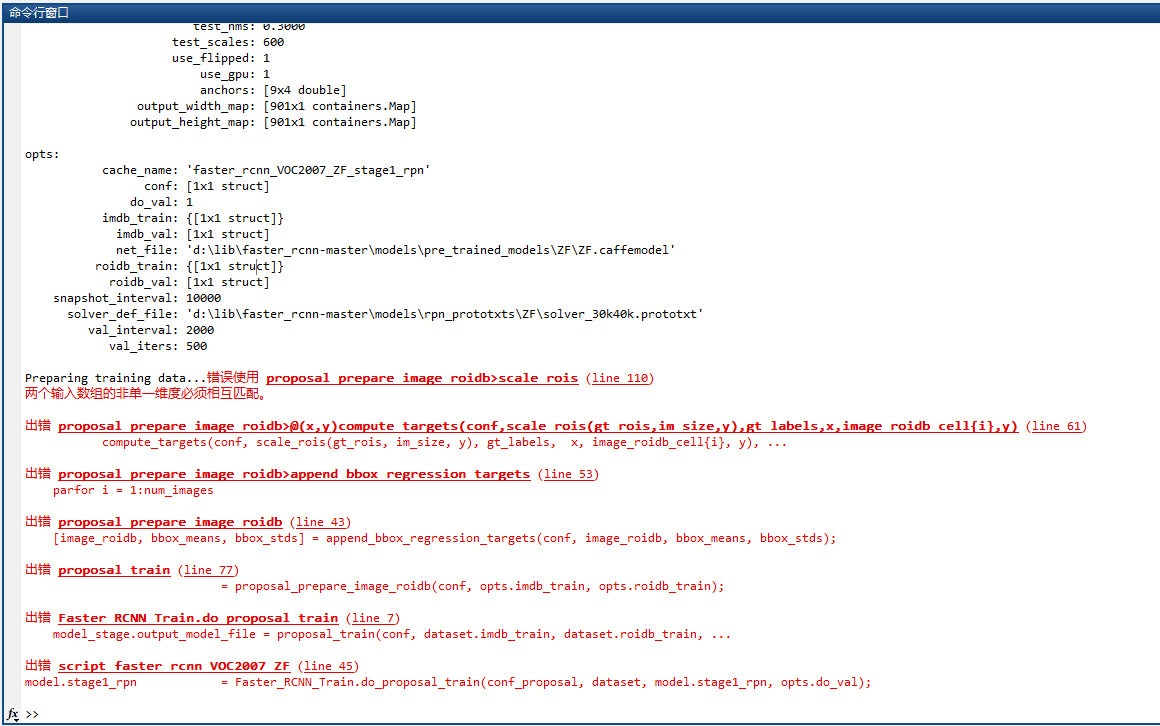
设断点debug后发现,roidb_train里各种字段都有值(比如gt、坐标、阈值、类别等);而roidb_val里面是空的。
实际上是在experiments+Faster_RCNN_Traindo_proposal_train.m里面,把dataset.roidb_test赋值给roidb_val了:
function model_stage = do_proposal_train(conf, dataset, model_stage, do_val)
if ~do_val
dataset.imdb_test = struct();
dataset.roidb_test = struct();
end
model_stage.output_model_file = proposal_train(conf, dataset.imdb_train, dataset.roidb_train, ...
'do_val', do_val, ...
'imdb_val', dataset.imdb_test, ...
'roidb_val', dataset.roidb_test, ... # 尼玛,在这里赋值了
'solver_def_file', model_stage.solver_def_file, ...
'net_file', model_stage.init_net_file, ...
'cache_name', model_stage.cache_name);
end
问题就是在这里了,不多说。那么接下来就是把experiments+Datasetvoc2007_test.m第11行、第14行,test改成val,保证以后在imdbcache目录下有val的mat数据存在,roidb_val也不会说里面内容都为空的了。
2 修改网络参数
看到下面这张图应该知道要改那几个文件了:
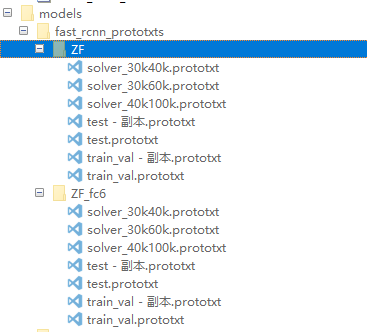
具体可以参考小咸鱼的faster-rcnn matlab版的配置