《自动化技术中的进给电气传动》 1.3节
本节主要以不可调电气传动系统作为实例,介绍了时间域描述系统的方法。
在该实例中,回路电感L及回路电阻R均被简化到电枢上,负载转矩也为包括电机本身负载转矩在内的所有转矩效果之和。且设励磁磁通(即Φ)为恒定值。
系统的工作原理框图为如下所示:

电枢的感应反向电压为em=wm*cm,,此处的cm即Ke*Φ。
通过代换,引入电气时间常数Tel后,得到系统的微分方程为:

在此处,进行了定标处理,定标的数值为:
电动机最大角速度wmax M。
空载时的最大电枢电压:
![]()
传动系统的短路转矩(即转轴没有角速度时):

再引入传动系统的机械时间常数后,得到的微分方程为:

疑问:系统中的电气时间常数和机械时间常数各有什么实际物理意义?
本节主要考虑了等式右侧的电压输入和负载转矩输入对右侧的转动速度输出的影响。其中电压的影响为基准响应特性,而负载转矩的影响为干扰响应特性。
![]()

考虑电压输入的基准响应特性时,设ML=0,此时微分方程变成一个二阶响应微分方程。影响响应特性曲线的参数为特征值和阻尼系数。而阻尼系数问电气时间常数和机械时间常数的函数,因此在设计该系统环节时,应该注意这个两个参数,以防系统超调量过大,影响系统稳定性。
在观察干扰响应特性时,主要考虑的是负载转矩的跃变对响应的影响,即考虑的是一个稳态到另一个稳态的过程。在这里考虑了系统微分方程的m和n与系统响应特征的关系。即n=m时,输入和输出都会跃变,n=m+1时,输入的跃变会使输出以一个有限的速度变化,n=m+k(k≥2)时,输出则不会有明显的变化。在本节考虑的系统中,n=m+1,因此负载转矩的变化会引起转速以有限的速度变化。
难点:在直流电机系统中,电压跃变和负载转矩跃变的区别
观察基准响应特性和干扰响应特性图时,去除平移的影响,我感觉两张图的波动很相似。但是有一个疑问,就是在考虑电压跃变的影响时,微分方程为n=m+2的形式,理论上应该是输出量没有明显变化,起始切线为水平的,但是看图似乎角速度的切线一开始并不为水平:

所以我不明白这里到底是干扰响应特性还是基准特征响应为标准的二阶响应,或者还是这是初始值造成的影响。但是我在PLECS上做了直流他励电动机的响应特性曲线后,对该位置放大观察后为如图所示:
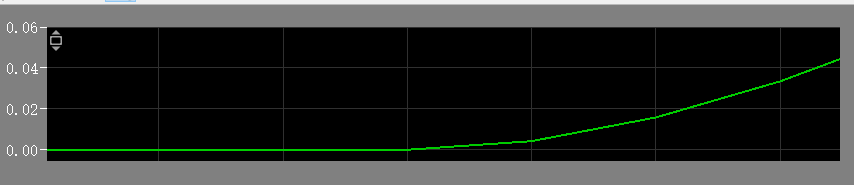
由图所示,的确是基准响应特性为二阶响应。而干扰基准响应虽然波动情况类似,但是实际上并不是一个二阶响应类型。所以其在原点的切线是非水平的。这个地方还请老师指正一下。
跃阶响应主要用于描述系统的调节特性。多用于在系统的微分方程定标之后再分析,这样可以通过某个点来求出系统响应特性的时间常数。
疑问:本节中下面这段话不明白“这种情况”指的是什么,以及为什么RA上的电压降可以忽略不计。

![]()
此外还有一些其他的响应,比如同输入的导数联系在一起的斜坡响应,单位脉冲响应,以及在频域分析中用到的正弦响应特性等。
《控制系统设计指南》第一章,第二章阅读笔记
第一章 控制理论简介
控制系统可以分为控制器和被控机器,控制器可以分为控制律和功率变换器。控制律是控制方法,如PID控制。功率变换器可以把能源用于控制对象。
鲁棒性:指控制系统在一定(结构,大小)的参数摄动下,维持其它某些性能的特性。
被控机器可以分为被控对象和反馈装置。被控对象是产生系统响应的一个单元和单元组。
第二章 频率域研究法
频率域传递函数只限于描述线性,时不变元件。
所谓线性是指均一性和叠加性。
所谓时不变性是指假定一个单元给定输入r(t)将产生出c(t),对于所有的τ>0,给定输入r(τ-t),其输出为c(τ-t)。
控制单元的传递函数有1.积分和微分。2.滤波器。3.补偿器。4.延迟。
系统的框图主要利用 进行简化,复杂的可以利用mason信号流图简化。
在性能测试中,增益越大,响应越快,但是增益越大,带宽越小,系统的稳定性降低。
在时间域,对稳定性测量用的最多的是跃阶响应,但是应该控制超调量。
如果在减小前增益又增大了,表明为临界稳定,这种现象称为凸峰。