1.应用场景
使用的是海思3516dv300的开发板。海思已经默认GPIO相关模块已全部编入内核。
通过cat /sys/class/gpio可以查看:

cd gpiochip0:

可以在设备树中查看:
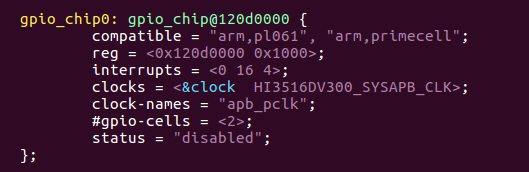
2.GPIO中断驱动实例
#include <linux/delay.h>
#include <linux/gpio.h>
#include <linux/interrupt.h>
#include <linux/module.h>
//模块参数,GPIO组号、组内偏移、方向、输出时的输出初始值
static unsigned int gpio_chip_num = 11;
module_param(gpio_chip_num, uint, S_IRUGO);
MODULE_PARM_DESC(gpio_chip_num, "gpio chip num");
static unsigned int gpio_offset_num = 2;
module_param(gpio_offset_num, uint, S_IRUGO);
MODULE_PARM_DESC(gpio_offset_num, "gpio offset num");
static unsigned int gpio_dir = 1;
module_param(gpio_dir, uint, S_IRUGO);
MODULE_PARM_DESC(gpio_dir, "gpio dir");
static unsigned int gpio_out_val = 1;
module_param(gpio_out_val, uint, S_IRUGO);
MODULE_PARM_DESC(gpio_out_val, "gpio out val");
//模块参数,中断触发类型
/*
* 0 - disable irq
* 1 - rising edge triggered
* 2 - falling edge triggered
* 3 - rising and falling edge triggered
* 4 - high level triggered
* 8 - low level triggered
*/
static unsigned int gpio_irq_type = 4;
module_param(gpio_irq_type, uint, S_IRUGO);
MODULE_PARM_DESC(gpio_irq_type, "gpio irq type");
spinlock_t lock;
static int gpio_dev_test_in(unsigned int gpio_num)
{
//设置方向为输入
if (gpio_direction_input(gpio_num)) {
pr_err("[%s %d]gpio_direction_input fail!
",
__func__, __LINE__);
return -EIO;
}
//读出GPIO输入值
pr_info ("[%s %d]gpio%d_%d in %d
", __func__, __LINE__,
gpio_num / 8, gpio_num % 8,
gpio_get_value(gpio_num));
return 0;
}
//中断处理函数
static irqreturn_t gpio_dev_test_isr(int irq, void *dev_id)
{
pr_info("[%s %d]
", __func__, __LINE__);
return IRQ_HANDLED;
}
static int gpio_dev_test_irq(unsigned int gpio_num)
{
unsigned int irq_num;
unsigned int irqflags = 0;
//设置方向为输入
if (gpio_direction_input(gpio_num)) {
pr_err("[%s %d]gpio_direction_input fail!
",
__func__, __LINE__);
return -EIO;
}
switch (gpio_irq_type) {
case 1:
irqflags = IRQF_TRIGGER_RISING;
break;
case 2:
irqflags = IRQF_TRIGGER_FALLING;
break;
case 3:
irqflags = IRQF_TRIGGER_RISING |
IRQF_TRIGGER_FALLING;
break;
case 4:
irqflags = IRQF_TRIGGER_HIGH;
break;
case 8:
irqflags = IRQF_TRIGGER_LOW;
break;
default:
pr_info("[%s %d]gpio_irq_type error!
",
__func__, __LINE__);
return -1;
}
pr_info("[%s %d]gpio_irq_type = %d
", __func__, __LINE__, gpio_irq_type);
/* IRQF_SHARED:这个中断标志经常能遇见,这个标志意思就是多个中断处理程序之间可以共享中断线,概括起来就是没有这个标志就只能独自一个人占用,标志了,就是很多人可以占用这个中断号来 */
irqflags |= IRQF_SHARED;
//根据GPIO编号映射中断号
irq_num = gpio_to_irq(gpio_num);
//注册中断
/*
irq_num:由gpio_to_irq()函数获取的中断号
gpio_dev_test_isr:中断触发函数
irqflags:中断触发类型
"gpio_dev_test":设置中断名称,通常是设备驱动程序的名称 在cat /proc/interrupts中可以看到此名称。
dev_id:最后一个参数,看到第三个参数中IRQF_SHARED时候,你会不会有这样的疑问,假如现在我要释放当前共享的指定这个中断程序时候,我如何释放?会不会把其他占用也会删除掉。
这就是第五个参数的意义,如果中断线是共享的,那么就必须传递能够代表当前设备的唯一信息。
函数返回值:成功返回0。如果返回非0,就表示有错误发生,这个时候你可以考虑当前中断是否被占用了,所以可以加上IRQF_SHARED标志
*/
if (request_irq(irq_num, gpio_dev_test_isr, irqflags,
"gpio_dev_test", &gpio_irq_type)) {
pr_info("[%s %d]request_irq error!
", __func__, __LINE__);
return -1;
}
return 0;
}
static void gpio_dev_test_irq_exit(unsigned int gpio_num)
{
unsigned long flags;
pr_info("[%s %d]
", __func__, __LINE__);
//释放注册的中断
spin_lock_irqsave(&lock, flags);
free_irq(gpio_to_irq(gpio_num), &gpio_irq_type);
spin_unlock_irqrestore(&lock, flags);
}
static int gpio_dev_test_out(unsigned int gpio_num, unsigned int gpio_out_val)
{
//设置方向为输出,并输出一个初始值
if (gpio_direction_output(gpio_num, !!gpio_out_val)) {
pr_err("[%s %d]gpio_direction_output fail!
",
__func__, __LINE__);
return -EIO;
}
pr_info("[%s %d]gpio%d_%d out %d
", __func__, __LINE__,
gpio_num / 8, gpio_num % 8, !!gpio_out_val);
return 0;
}
static int __init gpio_dev_test_init(void)
{
unsigned int gpio_num;
int status = 0;
pr_info("[%s %d]
", __func__, __LINE__);
//初始化自旋锁lock
spin_lock_init(&lock);
gpio_num = gpio_chip_num * 8 + gpio_offset_num;
//注册要操作的GPIO编号
/* 一般gpio_request封装了mem_request(),起保护作用,最后要调用mem_free之类的。主要是告诉内核这地址被占用了。当其它地方调用同一地址的gpio_request就会报告错误,该地址已被申请。在/proc/mem应该会有地址占用表描述。
这种用法的保护作用前提是大家都遵守先申请再访问,有一个地方没遵守这个规则,这功能就失效了。好比进程互斥,必需大家在访问临界资源的时候都得先获取锁一样,其中一个没遵守约定,代码就废了。 */
if (gpio_request(gpio_num, NULL)) {
pr_err("[%s %d]gpio_request fail! gpio_num=%d
", __func__, __LINE__, gpio_num);
return -EIO;
}
status = gpio_dev_test_irq(gpio_num);
if (status)
gpio_free(gpio_num);
return status;
}
static void __exit gpio_dev_test_exit(void)
{
unsigned int gpio_num;
pr_info("[%s %d]
", __func__, __LINE__);
gpio_num = gpio_chip_num * 8 + gpio_offset_num;
if (gpio_irq_type)
gpio_dev_test_irq_exit(gpio_num);
//释放注册的GPIO编号
gpio_free(gpio_num);
}
module_init(gpio_dev_test_init);
module_exit(gpio_dev_test_exit);
MODULE_DESCRIPTION("GPIO device test Driver sample");
MODULE_LICENSE("GPL");
/* cat /proc/devices 只显示驱动的主设备号,且是分类显示 arm-himix200-linux */
3.编译安装
3.1 编译并安装成对应的ko
参考:https://www.cnblogs.com/zhuangquan/p/13375806.html 中的第四小节
编译指定位置的驱动文件:
make ARCH=arm CROSS_COMPILE=arm-himix200-linux- M=drivers/char/mydrv/
编译成功后将ko放在开发板上执行insmod。
cat /proc/interrupts

详细可参考:(14条消息) Exynos4412 中断驱动开发(三)—— 设备树中中断节点的创建_知秋一叶-CSDN博客
(14条消息) Exynos4412 中断驱动开发(一)—— 中断基础及中断的注册过程_知秋一叶-CSDN博客