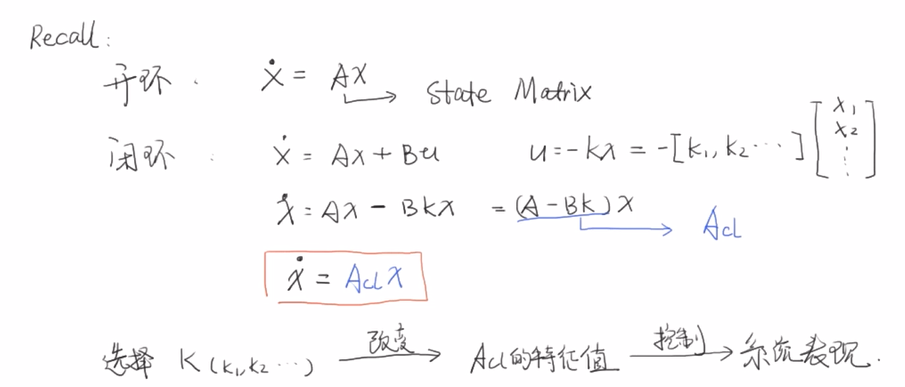
再线性控制器中讲到:

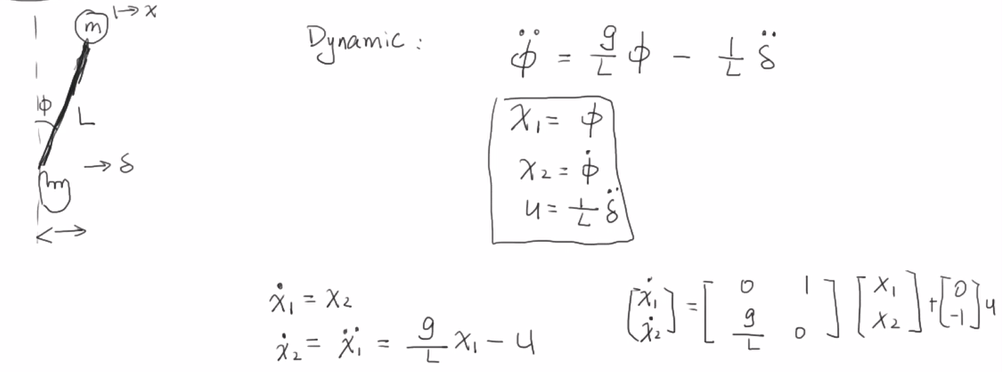
举例说明(线性控制器中的一个例子)博客中有说明
在matlab中:使用lqr求解K1、K2

这里希望角度(即x1)能迅速变化,所以Q矩阵中Q11为100,并没有关心角速度(dot角度)变化的情况所以Q22为1,也不关心能量U的变化,所以R=0.01。
最终求解到K1 = -100.4988; K2 = -17.9164
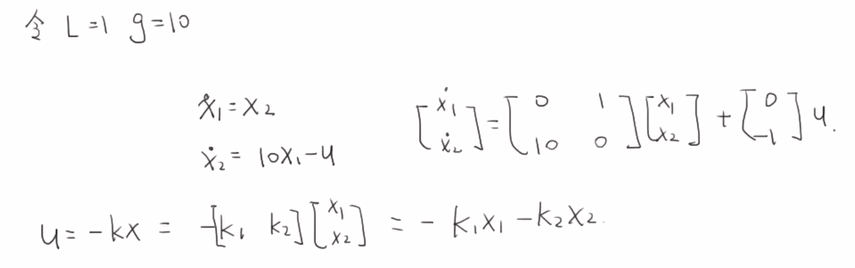
根据系统的状态方程(在右侧已列出),在simulink中搭建模型:(将求解到的K1、K2写入到模型中的K1、 K2中)

从右往左看第一个积分1/s双击进入设置初始角度值(假如设成5),K1,K2带入lqr(A,B,Q,R)求得的值
仿真结果:
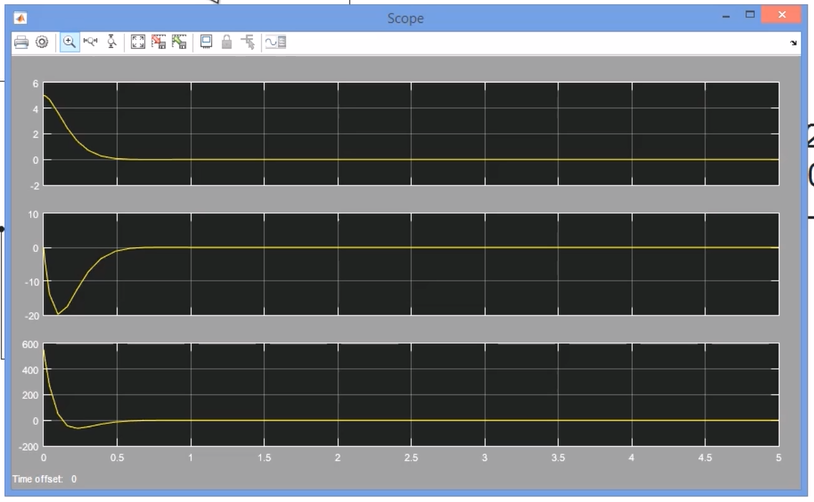
相对当R值很大Q矩阵中的值小时,更关心能量的影响(R大时稳定所需要的能量小)
Q=[1, 0 ; 0 ,1]
R = 100;
自行去测试;最终两中情况的对比如下(紫色是R= 100的情况)

最下面是能量的曲线,可以发现能量消耗要比之前低得多。
最上面的是角度变化曲线,相比于第一种,角度变化到稳定时刻要慢一些。