pcl_common中主要是包含了PCL库常用的公共数据结构和方法,比如PointCloud的类和许多用于表示点,曲面,法向量,特征描述等点的类型,用于计算距离,均值以及协方差,角度转换以及几何变化的函数。
common模块中的头文件
- angles.h 定义了标准的C接口的角度计算函数
- centriod.h 定义了中心点的估算以及协方差矩阵的计算
- commo.h 标准的C以及C++类,是其他common 函数的父类
- distance.h 定义标准的C接口用于计算距离
- file_io.h 定义了一些文件帮助写或者读方面的功能。
- random.h 定义一些随机点云生成的函数
- geometry.h 定义一些基本的几何功能的函数
- intersection.h 定义线与线相交的函数
- norm.h 定义了标准的C方法计算矩阵的正则化
- time.h 定义了时间计算的函数
- Point_types.h 定义了所有PCL实现的点云的数据结构的类型
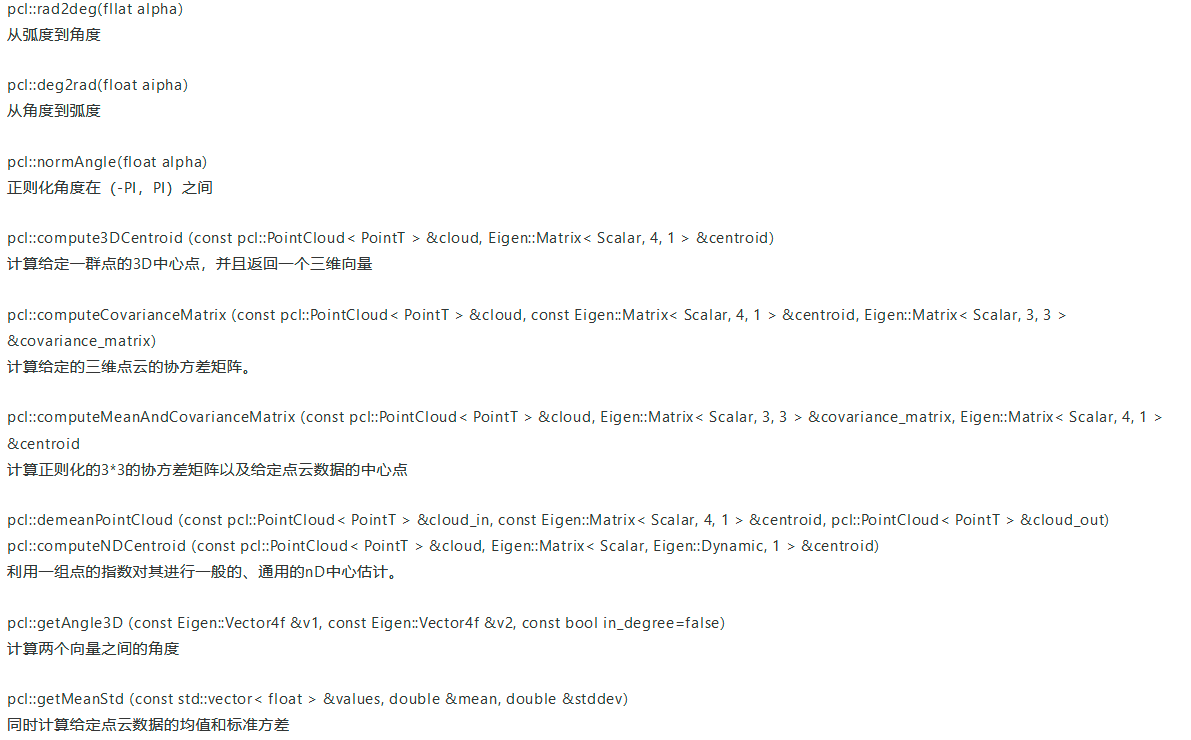
common模块中的基本函数
参考:
PCL_common模块api代码解析:https://www.cnblogs.com/li-yao7758258/p/10126363.html
PCL common中常见的基础功能函数: https://mp.weixin.qq.com/s/QbbrMCIG0wlSFOZwLP2zNw
https://blog.csdn.net/weixin_46098577/article/details/111563923?
https://www.yuque.com/huangzhongqing/pcl/uv5cn9