
这是在任何情况下都成立的
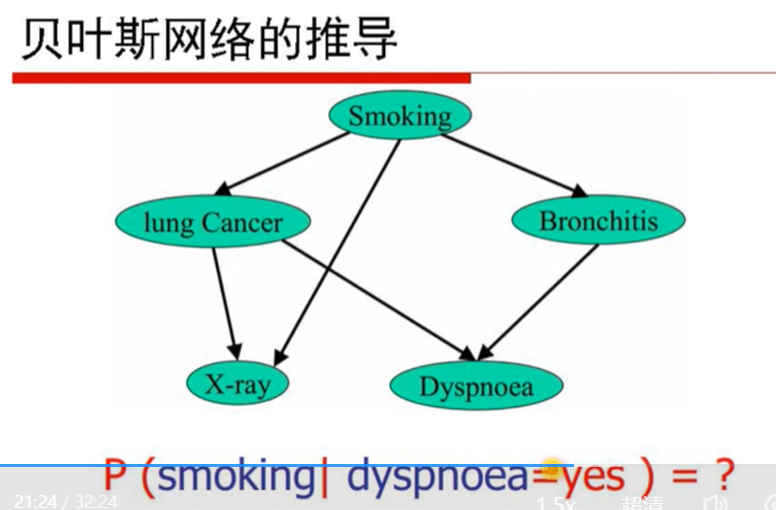
再给出具体的贝叶斯网络图的情况下 可以化简 eg:

-
1是得到smoking概率需要的一个参数,吸烟或者不吸烟 已知吸烟为0.4 不吸就是0.6呗 所以知道一个就√
-
2是lung cancer的两个参数 他只和抽烟有关 抽烟的时候(患了肺癌/没患肺癌)是多少 不抽烟的时候(患了肺癌/没患肺癌)是多少 只需要两个参数最终会有四个数
-
4是呼吸困难的参数个数 ,肺癌又支气管炎的呼吸困难的概率xxxxxxxx00 01 10 11

D-Separation方法可以快速的判断出DAG(有向无环图)两个节点之间是否是条件独立的
原理
对于给定的结点集ε,如果对贝叶斯网中的结点Vi和Vj(没说vij在Σ内)之间的每个无向路径,在路径上有某个结点Vb,如果有属性:
(1)Vb在ε中,且路径上的两条弧都以Vb为头(即弧在Vb处开始(出发));
(2)Vb在ε中,路径上的一条弧以Vb为头,一条以Vb为尾 ;
(3)Vb和它的任何后继都不在ε中,路径上的两条弧都以Vb为头(即弧在Vb处结束);
则称Vi和Vj 被Vb结点阻塞。
如果Vi和Vj被证据集合ε中的任意结点阻塞,则称Vi和Vj是被ε集合D分离,结点Vi和Vj条件独立于给定的证据集合ε,即P(Vi|Vj,ε) =P(Vi|ε)和P(Vj|Vi,ε) =P(Vj|ε),表示为:I(Vi,Vj|ε) 或I(Vj,Vi|ε) 。
无向路径:DAG图是有向图,所以其中的路径也应该是有向路径,这里所指的无向路径是不考虑DAG图中的方向性时的路径。
条件独立:如具有以上三个属性之一,就说结点Vi和Vj条件独立于给定的结点集ε。
阻塞:给定证据集合ε,当上述条件中的任何一个满足时,就说Vb阻塞相应的那条路径。
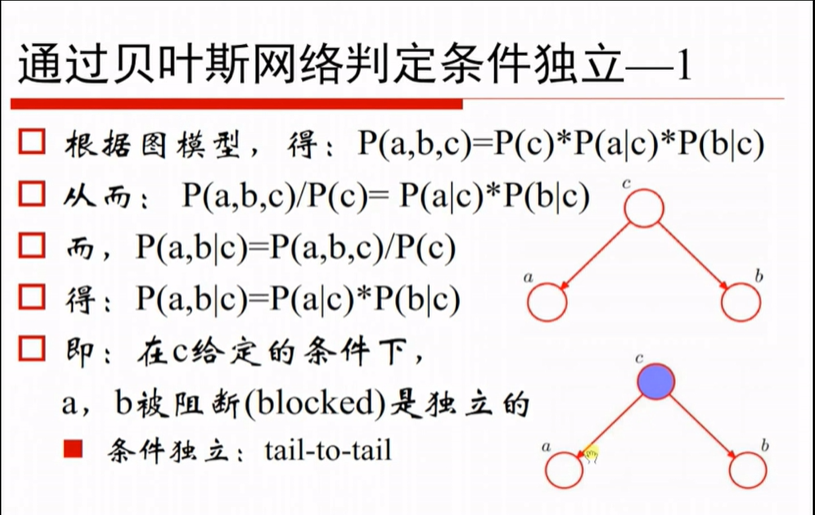
p(a,b,c) = p(c)p(a|c)p(b|c)
两边都/p(c)
又因为p(a b|c)ab的联合概率 = p(a,b,c)/p(c)
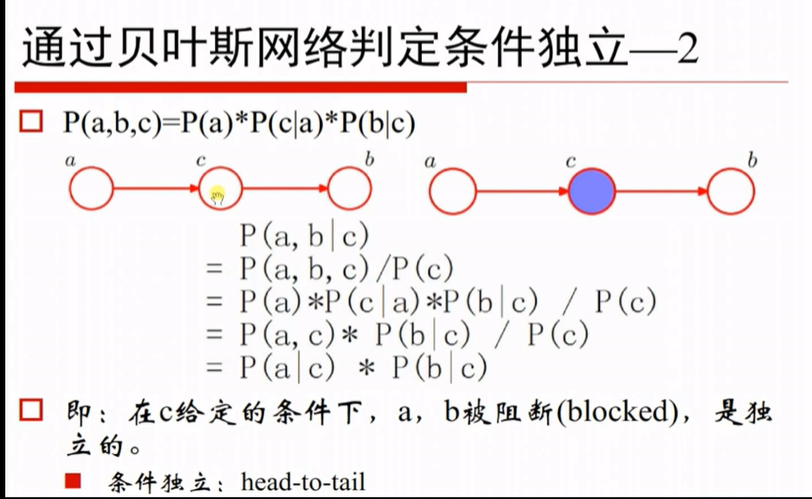
p(a,b,c) = p(a)p(c|a)p(b|c)
已知p(a,b|c) = p(a,b,c)/p(c) 带入p(a,b,c) = p(a)p(c|a)p(b|c)
又因为 p(a)p(c|a) = p(a,c)
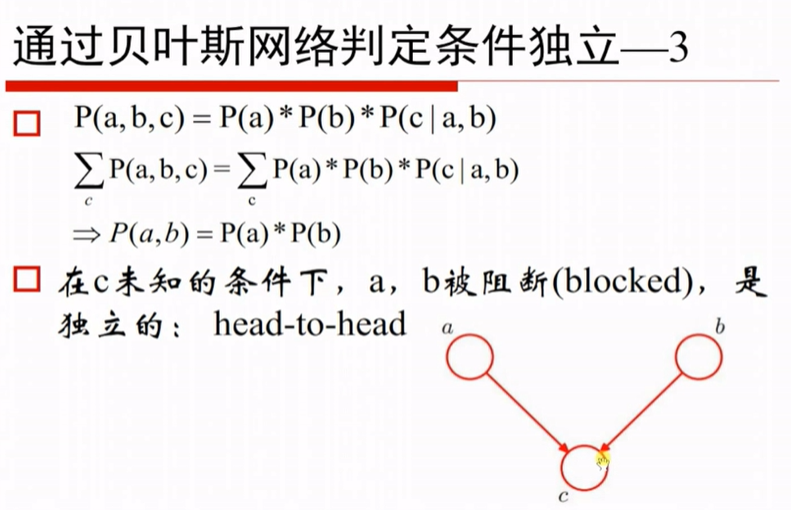
p(a,b,c) = p(a)p(b)p(c|a,b)
等号左右两侧给c做积分 得到p(a,b)=p(a)p(b) 即和c无关的情况下,ab独立
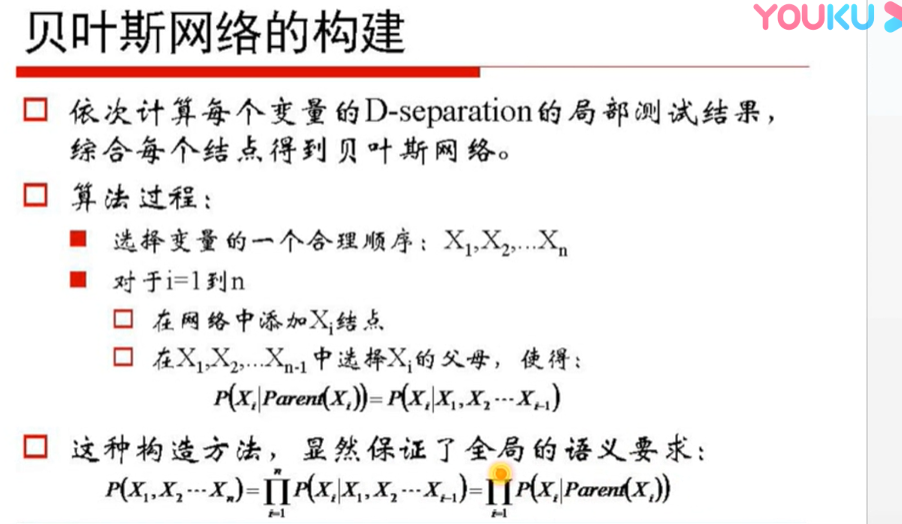
原本联合公式 p(x1,x2,x3....) = p(xi|x1,x2,..xi-1)的 但是通过贝叶斯的具体情况 化简掉一些无关的变量
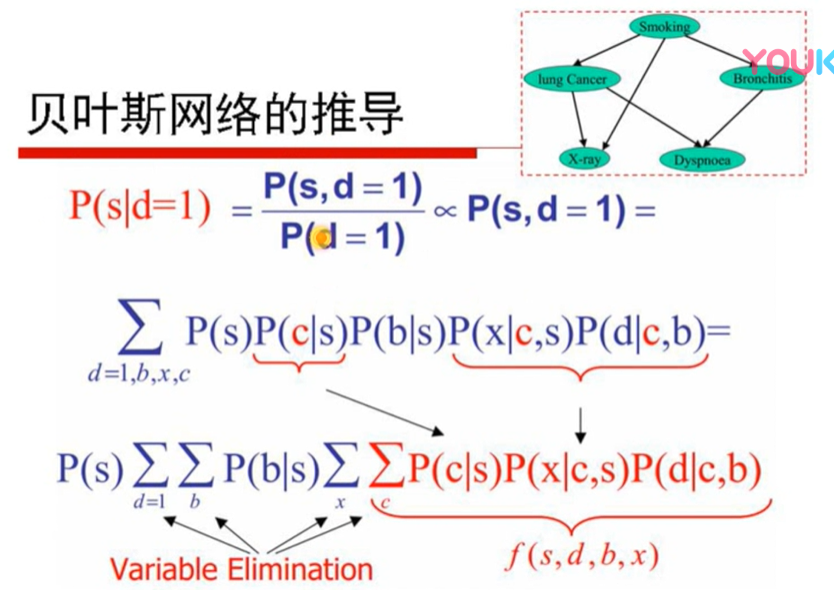
p(d=1)是个规划因子,忽略,考虑联合分布,p(s|d=1) = p(s,c,b,x,d)的联合分布之后积掉bxc让d=1 就仍然相等 求出p(s|d)
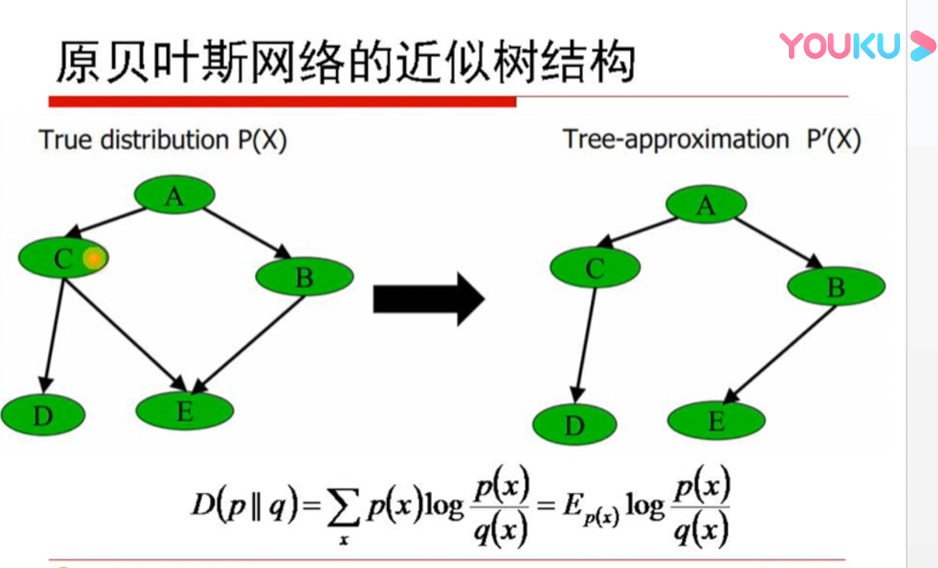
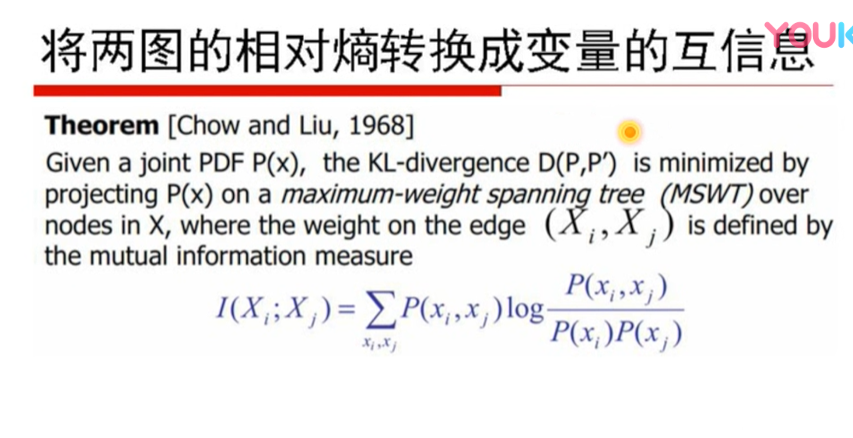
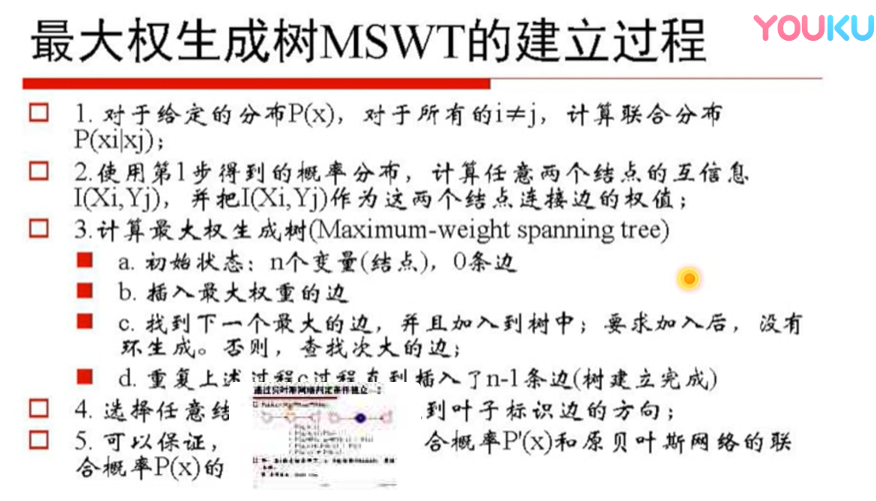
想由p(x)变到p'(x) 取消环 让相对熵最小最接近 信息相关度最大
以上内容来自 七月算法贝叶斯
伯努利分布、二项分布、Beta分布、多项分布和Dirichlet分布
伯努利试验 是只有两种可能结果的单次随机试验。
二项分布是重复多次的伯努利分布
多项分布:首先(如果在一次实验中,出现的结果不是2种而是k种可能 相对于伯努利)这样的实验进行n次(与二项分布 之于 伯努利分布 相同)
多项式分布(Multinomial Distribution)是二项式分布的推广。还是做n次试验,只不过每次试验的结果可以有多m个,且m个结果发生的概率互斥且和为1,则发生其中一个结果X次的概率就是多项式分布
狄利克雷分布(Dirichlet distribution)是Beta分布在高维情形的推广
Dirichlet分布可以看做是分布之上的分布。如何理解这句话,我们可以先举个例子:假设我们有一个骰子,其有六面,分别为{1,2,3,4,5,6}。现在我们做了10000次投掷的实验,得到的实验结果是六面分别出现了{2000,2000,2000,2000,1000,1000}次,如果用每一面出现的次数与试验总数的比值估计这个面出现的概率,则我们得到六面出现的概率,分别为{0.2,0.2,0.2,0.2,0.1,0.1}。现在,我们还不满足,我们想要做10000次试验,每次试验中我们都投掷骰子10000次。我们想知道,出现这样的情况使得我们认为,骰子六面出现概率为{0.2,0.2,0.2,0.2,0.1,0.1}的概率是多少(说不定下次试验统计得到的概率为{0.1, 0.1, 0.2, 0.2, 0.2, 0.2}这样了)。这样我们就在思考骰子六面出现概率分布这样的分布之上的分布。而这样一个分布就是Dirichlet分布。
β分布:
Beta分布可以看做是分布之上的分布。我们还是以抛硬币为例。不过,我们并不假设硬币是均匀的(也就是说:并不假设每次抛硬币,正面朝上的概率为0.5),所以抛硬币的正面朝上的概率p是未知的(只知道p∈[0,1])。如果进行一次二项分布试验,在这次二项分布试验中,抛硬币10000次,其中正面朝上7000次,反面朝上3000次,我们可以得到,正负面朝上的概率分别为{p,1-p}={0.7,0.3}。但是我们并不确信这个结果是正确的。我们想要做10000次二项分布试验,在每次二项分布试验中,均抛硬币10000次(说不定在其他二项分布实验中,得到的正负面朝上的概率是{0.2,0.8}或者{0.6,0.4},这些情况都有可能),那么,我们想要知道,在这样的多次重复二项分布实验中,抛硬币最后得到正负面朝上概率为{0.7,0.3}这样概率为多少?这就是在求抛硬币的概率分布之上的分布。这样的分布就叫做Beta分布。
正如二项分布可以看做多次进行伯努利试验所得到的分布一样,Beta分布也可以看做是多次进行二项分布的试验所得到的分布,是分布之上的分布。
大家讲解的大都内容不全 有点怪怪的 信息还是少
需要推断的参数θ看做是固定的未知常数,即概率
虽然是未知的,但最起码是确定的一个值,同时,样本X 是随机的,所以频率派重点研究样本空间,大部分的概率计算都是针对样本X 的分布;
最大似然估计(MLE)和最大后验估计(MAP)都是把待估计的参数看作一个拥有固定值的变量,只是取值未知。通常估计的方法都是找使得相应的函数最大时的参数;
贝叶斯派:往桌子上扔球,球掉在某个地方的概率是随机的,球掉在这个位置那个位置的概率 我知道他要是掉在某个地方,概率是多少,但我不确定他掉在哪
一个朋友创业,你明明知道创业的结果就两种,即要么成功要么失败,但你依然会忍不住去估计他创业成功的几率有多大?你如果对他为人比较了解,而且有方法、思路清晰、有毅力、且能团结周围的人,你会不由自主的估计他创业成功的几率可能在80%以上。这种不同于最开始的“非黑即白、非0即1”的思考方式,便是贝叶斯式的思考方式。
最大似然估计
-
也称为极大似然估计 https://www.bilibili.com/video/av15944258/ 模型已定,参数未知 利用已知的样本结果,反推最有可能(最大概率)导致这样结果的参数值。 最大似然估计中采样需满足一个很重要的假设,就是所有的采样都是独立同分布的。 https://blog.csdn.net/zengxiantao1994/article/details/72787849
贝叶斯估计
两大学派的争论 频率学派与贝叶斯学派只是解决问题的角度不同。
在对事物建模时,用θ表示模型的参数,请注意,解决问题的本质就是求θ。那么:
(1) 频率学派:存在唯一真值θ。举一个简单直观的例子—抛硬币,我们用P(head)来表示硬币的bias。抛一枚硬币100次,有20次正面朝上,要估计抛硬币正面朝上的bias P(head)=θ。在频率学派来看,θ= 20 / 100 = 0.2,很直观。
当数据量趋于无穷时,这种方法能给出精准的估计;然而缺乏数据时则可能产生严重的偏差。例如,对于一枚均匀硬币,即θ= 0.5,抛掷5次,出现5次正面 (这种情况出现的概率是1/2^5=3.125%),频率学派会直接估计这枚硬币θ= 1,出现严重错误。
(2) 贝叶斯学派: θ是一个随机变量,符合一定的概率分布。在贝叶斯学派里有两大输入和一大输出,输入是先验 (prior)和似然 (likelihood),输出是后验 (posterior)。
同样是抛硬币的例子,对一枚均匀硬币抛5次得到5次正面,如果先验认为大概率下这个硬币是均匀的 (例如最大值取在0.5处的Beta分布),那么P(head),即P(θ|X),是一个distribution,最大值会介于0.5~1之间,而不是武断的θ= 1。
你可能会问:如果连数据都没有,我怎么知道我的参数是怎么分布的?你提出这个问题,就说明你是一个赤裸裸的频率派学家,你需要通过数据来得到你的参数!而这并不是贝叶斯派的考虑,贝叶斯估计最重要的就是那个先验的获得。虽然你这次的一组数据,比如说扔三次硬币产生的序列是(110)这样分布的,但是其实我根据我历史的经验来看,一枚硬币正反面其实很有可能是按照均匀分布来的,只不过可能因为你抛得次数少了所以产生了不是均匀分布的效果。所以我要考虑我以往的经验在里面。
你可能又会问:那你这个均匀分布不就是完全猜来的嘛,你怎么知道我这次是不是一样的硬币呢?没错!就是“猜来的”。先验在很多时候完全是假设,然后去验证有的数据是否吻合先验猜想,所以这里的猜很重要。还要注意,先验一定是与数据无关的,你不能看到了数据再做这些猜想,一定是没有任何数据之前你就猜了一个参数的先验概率。 率表示为P(A|B),读作“在B条件下A的概率”。
如果一枚硬币抛10次,10次均为正面,根据最大似然估计,那么这枚硬币的概率应该为1。
当抛硬币10次,10次都是正面的时候,最大后验估计
是一个分布,最大值位于0.5~1之间,哪怕是抛硬币100次,100次都是正面的时候,最大后验估计
极大似然估计是想让似然函数极大化,而考虑了MAP算法的贝叶斯估计,其实是想让后验概率极大化。主要区别在于估计参数中,一个考虑了先验一个没有考虑先验
贝叶斯定理
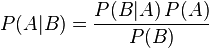
贝叶斯定理是关于随机事件A和B的条件概率和边缘概率的一则定理。
P(B)=P(B|A)P(A)+P(B|∼A)P(∼A)
在参数估计中可以写成下面这样:
这个公式也称为逆概率公式,可以将后验概率转化为基于似然函数和先验概率的计算表达式,即
在贝叶斯定理中,每个名词都有约定俗成的名称:
P(A)是A的先验概率先验概率或边缘概率。之所以称为"先验"是因为它不考虑任何B方面的因素。 P(A|B)是已知B发生后A的条件概率(在B发生的情况下A发生的可能性),也由于得自B的取值而被称作A的后验概率。 P(B|A)是已知A发生后B的条件概率,也由于得自A的取值而被称作B的后验概率。 P(B)是B的先验概率或边缘概率,也作标准化常量(normalized constant). 按这些术语,Bayes定理可表述为:
后验概率 = (相似度*先验概率)/标准化常量,也就是说,后验概率与先验概率和相似度的乘积成正比。 另外,比例P(B|A)/P(B)也有时被称作标准相似度(standardised likelihood),Bayes定理可表述为:
后验概率 = 标准相似度*先验概率
共轭先验
在贝叶斯统计中,如果后验分布与先验分布属于同类,则先验分布与后验分布被称为共轭分布,而先验分布被称为似然函数的共轭先验。
似然函数
似然(likelihood)这个词其实和概率(probability)是差不多的意思,Colins字典这么解释:The likelihood of something happening is how likely it is to happen. 你把likelihood换成probability,这解释也读得通。但是在统计里面,似然函数和概率函数却是两个不同的概念(其实也很相近就是了)。
对于这个函数:
P(x|θ) 输入有两个:x表示某一个具体的数据;θθ表示模型的参数。
如果θθ是已知确定的,xx是变量,这个函数叫做概率函数(probability function),它描述对于不同的样本点x,其出现概率是多少。
如果xx是已知确定的,θθ是变量,这个函数叫做似然函数(likelihood function), 它描述对于不同的模型参数,出现x这个样本点的概率是多少。
贝叶斯网络结构学习
-
基于评分搜索的方法
那么如何根据已有的数据集学得贝叶斯网络结构呢?一种最简单的想法就是遍历所有可能的结构,然后用某个标准去衡量各个结构,进而找出最好的结构。
是的,这就是评分搜索的基本思想
其中,评分函数和搜索策略是主要因素
1.常用的评分函数
-
基于贝叶斯统计的评分函数
-
P(G|D)=P(D|G)P(G)/P(D)通常分母是连续的,与拓扑结构G无关,因此应该最大化分子P(D|G)P(G),因此其核心思想就是给定训练数据集D,寻求具有最大后验概率的拓扑结构。因此两边取对数log(P(S|D)) = log(P(D/G))+log(P(S))
-
K2评分函数 BIC BD评分 BDe评分函数
-
-
基于信息理论的评分函数
-
主要理论是最小描述长度原理MDL,基于MDL的评分函数具有2个部分,训练数据集的似然函数值Ldata和网络模型的复杂度Lnet,MDL的测度表示为Ldata-Lnet
-
2.搜索策略:贪心搜索,爬山法,模拟退火,
-
-
基于条件独立测试的方法
经过Drafting,Thickening,Thinning三个步骤,通过计算相互信息量(Mutual Information)来确定结点间的条件独立
-