之前的博客中,我们使用rviz进行了TurtleBot的仿真,而且使用urdf文件建立了自己的机器人smartcar,本篇博客是将两者进行结合,使用smartcar机器人在rviz中进行仿真。
一、模型完善
之前我们使用的都是urdf文件格式的模型,在很多情况下,ROS对urdf文件的支持并不是很好,使用宏定义的.xacro文件兼容性更好,扩展性也更好。所以我们把之前的urdf文件重新整理编写成.xacro文件。
.xacro文件主要分为三部分(以下文件均创建在urdf文件夹下,上一章节创建的文件可以删除):
1、机器人主体(smartcar_body.urdf.xacro)
<?xml version="1.0"?> <robot name="smartcar" xmlns:xacro="http://ros.org/wiki/xacro"> <xacro:property name="M_PI" value="3.14159"/> <!-- Macro for SmartCar body. Including Gazebo extensions, but does not include Kinect --> <xacro:include filename="$(find smartcar_description)/urdf/gazebo.urdf.xacro"/> <xacro:property name="base_x" value="0.33" /> <xacro:property name="base_y" value="0.33" /> <xacro:macro name="smartcar_body"> <link name="base_link"> <inertial> <origin xyz="0 0 0.055"/> <mass value="1.0" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial> <visual> <geometry> <box size="0.25 .16 .05"/> </geometry> <origin rpy="0 0 0" xyz="0 0 0.055"/> <material name="blue"> <color rgba="0 0 .8 1"/> </material> </visual> <collision> <origin rpy="0 0 0" xyz="0 0 0.055"/> <geometry> <box size="0.25 .16 .05" /> </geometry> </collision> </link> <link name="left_front_wheel"> <inertial> <origin xyz="0.08 0.08 0.025"/> <mass value="0.1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial> <visual> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> <material name="black"> <color rgba="0 0 0 1"/> </material> </visual> <collision> <origin rpy="0 1.57075 1.57075" xyz="0.08 0.08 0.025"/> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> </collision> </link> <joint name="left_front_wheel_joint" type="continuous"> <axis xyz="0 0 1"/> <parent link="base_link"/> <child link="left_front_wheel"/> <origin rpy="0 1.57075 1.57075" xyz="0.08 0.08 0.025"/> <limit effort="100" velocity="100"/> <joint_properties damping="0.0" friction="0.0"/> </joint> <link name="right_front_wheel"> <inertial> <origin xyz="0.08 -0.08 0.025"/> <mass value="0.1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial> <visual> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> <material name="black"> <color rgba="0 0 0 1"/> </material> </visual> <collision> <origin rpy="0 1.57075 1.57075" xyz="0.08 -0.08 0.025"/> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> </collision> </link> <joint name="right_front_wheel_joint" type="continuous"> <axis xyz="0 0 1"/> <parent link="base_link"/> <child link="right_front_wheel"/> <origin rpy="0 1.57075 1.57075" xyz="0.08 -0.08 0.025"/> <limit effort="100" velocity="100"/> <joint_properties damping="0.0" friction="0.0"/> </joint> <link name="left_back_wheel"> <inertial> <origin xyz="-0.08 0.08 0.025"/> <mass value="0.1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial> <visual> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> <material name="black"> <color rgba="0 0 0 1"/> </material> </visual> <collision> <origin rpy="0 1.57075 1.57075" xyz="-0.08 0.08 0.025"/> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> </collision> </link> <joint name="left_back_wheel_joint" type="continuous"> <axis xyz="0 0 1"/> <parent link="base_link"/> <child link="left_back_wheel"/> <origin rpy="0 1.57075 1.57075" xyz="-0.08 0.08 0.025"/> <limit effort="100" velocity="100"/> <joint_properties damping="0.0" friction="0.0"/> </joint> <link name="right_back_wheel"> <inertial> <origin xyz="-0.08 -0.08 0.025"/> <mass value="0.1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial> <visual> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> <material name="black"> <color rgba="0 0 0 1"/> </material> </visual> <collision> <origin rpy="0 1.57075 1.57075" xyz="-0.08 -0.08 0.025"/> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> </collision> </link> <joint name="right_back_wheel_joint" type="continuous"> <axis xyz="0 0 1"/> <parent link="base_link"/> <child link="right_back_wheel"/> <origin rpy="0 1.57075 1.57075" xyz="-0.08 -0.08 0.025"/> <limit effort="100" velocity="100"/> <joint_properties damping="0.0" friction="0.0"/> </joint> <link name="head"> <inertial> <origin xyz="0.08 0 0.08"/> <mass value="0.1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial> <visual> <geometry> <box size=".02 .03 .03"/> </geometry> <material name="white"> <color rgba="1 1 1 1.5"/> </material> </visual> <collision> <origin xyz="0.08 0 0.08"/> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> </collision> </link> <joint name="tobox" type="fixed"> <parent link="base_link"/> <child link="head"/> <origin xyz="0.08 0 0.08"/> </joint> </xacro:macro> </robot>
2、gazebo属性部分(gazebo.urdf.xacro)
<?xml version="1.0"?> <robot xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller" xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface" xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor" xmlns:xacro="http://ros.org/wiki/xacro" name="smartcar_gazebo"> <!-- ASUS Xtion PRO camera for simulation --> <!-- gazebo_ros_wge100 plugin is in kt2_gazebo_plugins package --> <xacro:macro name="smartcar_sim"> <gazebo reference="base_link"> <material>Gazebo/Blue</material> </gazebo> <gazebo reference="right_front_wheel"> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="right_back_wheel"> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="left_front_wheel"> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="left_back_wheel"> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="head"> <material>Gazebo/White</material> </gazebo> </xacro:macro> </robot>
3、主文件(smartcar.urdf.xacro)
<?xml version="1.0"?> <robot name="smartcar" xmlns:xi="http://www.w3.org/2001/XInclude" xmlns:gazebo="http://playerstage.sourceforge.net/gazebo/xmlschema/#gz" xmlns:model="http://playerstage.sourceforge.net/gazebo/xmlschema/#model" xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor" xmlns:body="http://playerstage.sourceforge.net/gazebo/xmlschema/#body" xmlns:geom="http://playerstage.sourceforge.net/gazebo/xmlschema/#geom" xmlns:joint="http://playerstage.sourceforge.net/gazebo/xmlschema/#joint" xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller" xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface" xmlns:rendering="http://playerstage.sourceforge.net/gazebo/xmlschema/#rendering" xmlns:renderable="http://playerstage.sourceforge.net/gazebo/xmlschema/#renderable" xmlns:physics="http://playerstage.sourceforge.net/gazebo/xmlschema/#physics" xmlns:xacro="http://ros.org/wiki/xacro"> <include filename="$(find smartcar_description)/urdf/smartcar_body.urdf.xacro" /> <!-- Body of SmartCar, with plates, standoffs and Create (including sim sensors) --> <smartcar_body/> <smartcar_sim/> </robot>
二、lanuch文件(smartcar_display.rviz.launch)
在launch文件中要启动节点和模拟器。
<launch> <param name="/use_sim_time" value="false" /> <!-- Load the URDF/Xacro model of our robot --> <arg name="urdf_file" default="$(find xacro)/xacro '$(find smartcar_description)/urdf/smartcar.urdf.xacro' --inorder" /> <arg name="gui" default="false" /> <param name="robot_description" command="$(arg urdf_file)" /> <param name="use_gui" value="$(arg gui)"/> <node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen"> <param name="sim" value="true"/> </node> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" > </node> <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher"> <param name="publish_frequency" type="double" value="20.0" /> </node> <!-- We need a static transforms for the wheels --> <node pkg="tf" type="static_transform_publisher" name="odom_left_wheel_broadcaster" args="0 0 0 0 0 0 /base_link /left_front_link 100" /> <node pkg="tf" type="static_transform_publisher" name="odom_right_wheel_broadcaster" args="0 0 0 0 0 0 /base_link /right_front_link 100" /> <node name="rviz" pkg="rviz" type="rviz" args="-d $(find smartcar_description)/urdf.rviz" /> </launch>
再在smartcar_description文件夹下的config文件夹中建立下面的文件
(如果不想进行这一步,把launch文件中的
<rosparam file="$(find smartcar_description)/config/smartcar_arbotix.yaml" command="load" />
这行代码注释即可。):
$ cd ~/catkin_ws/src/config
$ touch smartcar_arbotix.yaml
把下面的代码粘进去。
port: /dev/ttyUSB0 baud: 115200 rate: 20 sync_write: True sync_read: True read_rate: 20 write_rate: 20 controllers: { # Pololu motors: 1856 cpr = 0.3888105m travel = 4773 ticks per meter (empirical: 4100) base_controller: {type: diff_controller, base_frame_id: base_link, base_ 0.26, ticks_meter: 4100, Kp: 12, Kd: 12, Ki: 0, Ko: 50, accel_limit: 1.0 } }
复制使用cp指令将/opt/ros/kinetic/share/urdf_tutorial 目录下的 urdf.rviz拷贝到项目目录 ~/catkin_ws/src/smartcar_description 下
三、仿真测试
首先运行lanuch,既可以看到rviz中的机器人:
roslaunch smartcar_description smartcar_display.rviz.launch
rostopic pub -1 /cmd_vel geometry_msgs/Twist '{}' 《停止运动》 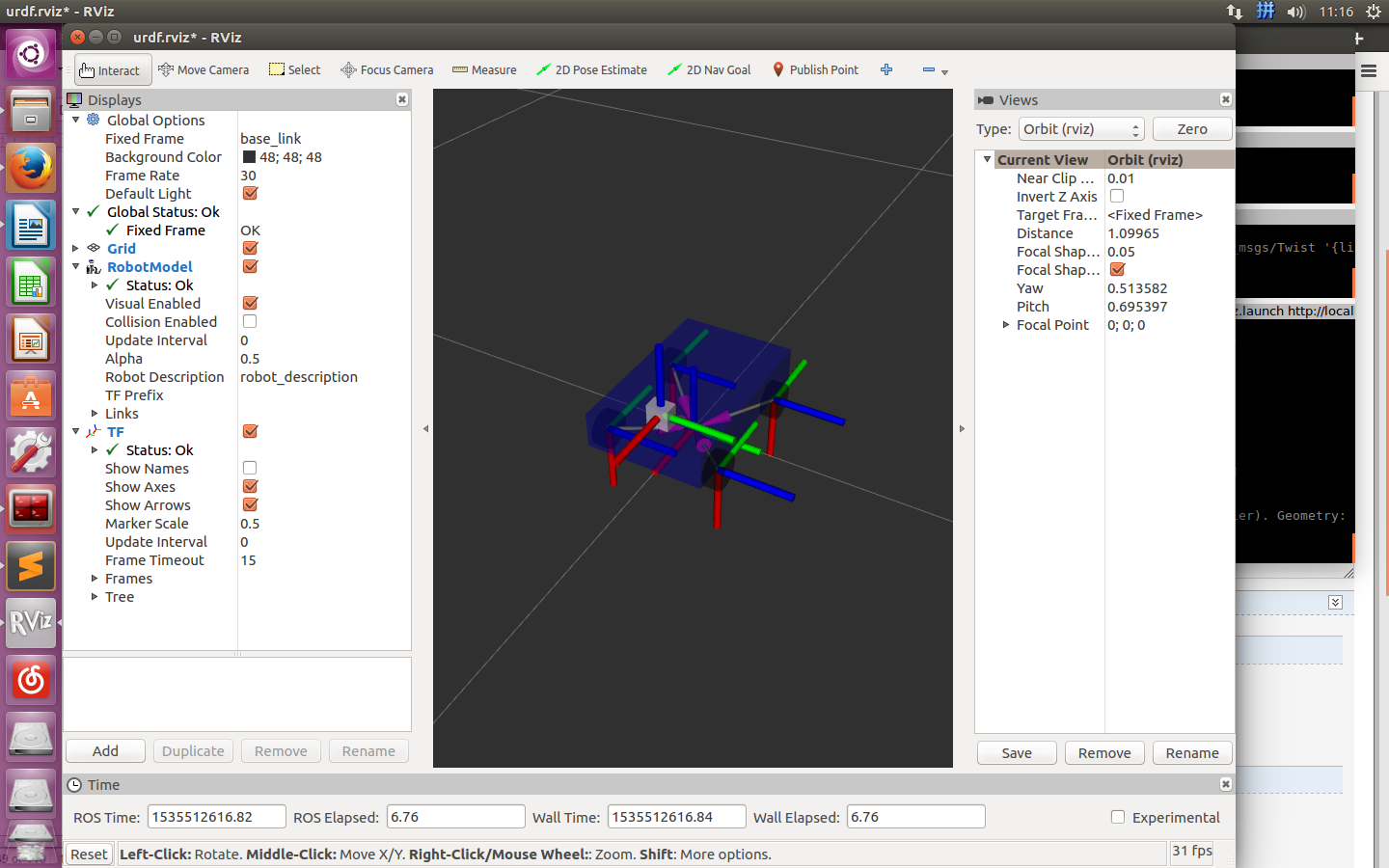
发布一条动作的消息。
01.rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.5, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
却发现是一个坐标轴在运动。这明显和我们想要的结果不同。
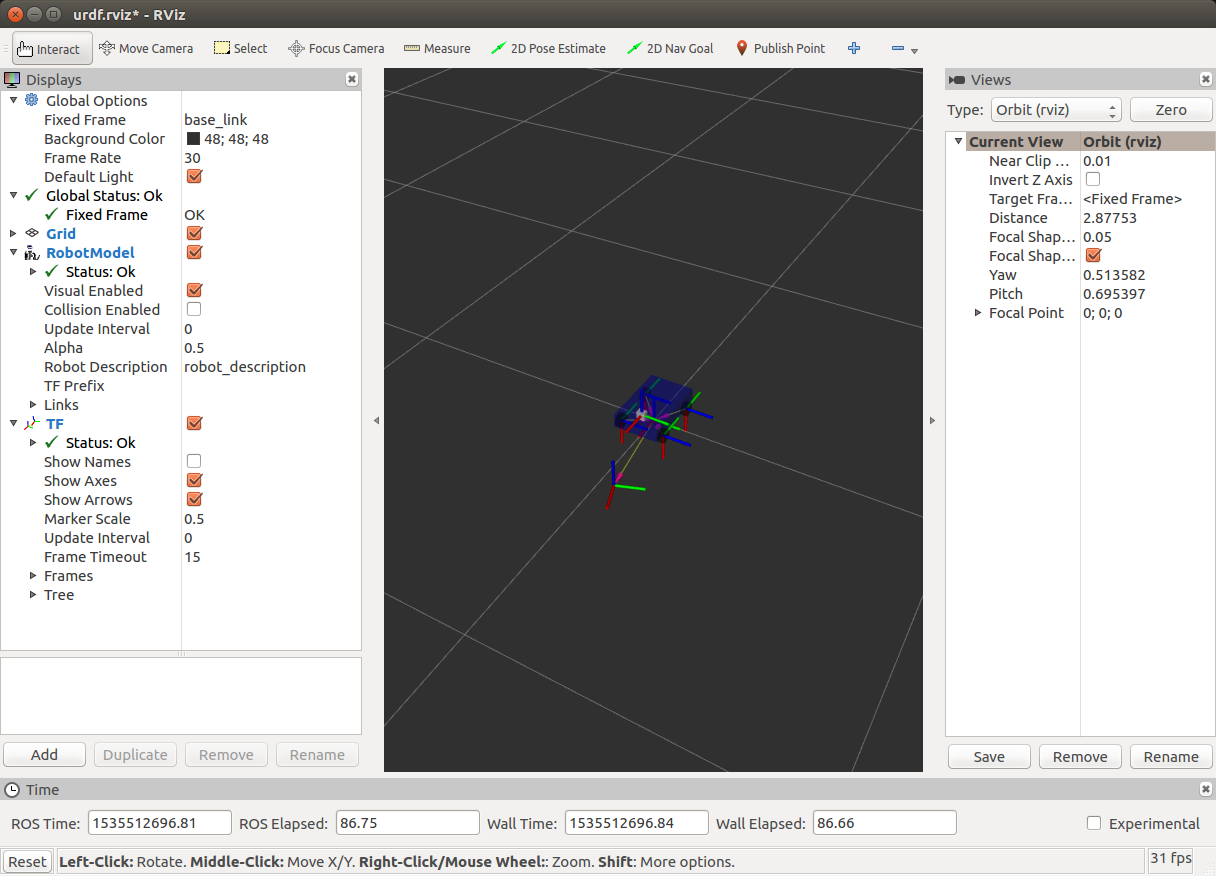
这里,我们需要对rviz客户端进行设置。
将Global Options下的Fixed Frame更改为odom,这样我们的小车就能正常的运行了。
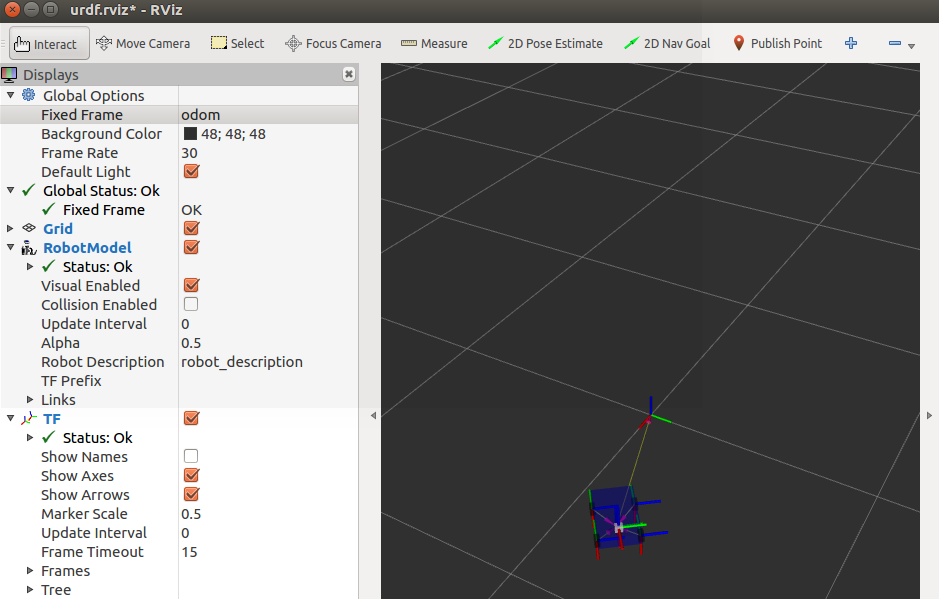
但是,我们之前的历程中有指示小车的方向,这里要怎么设置呢?我们需要在窗口的左下角的Add按钮中添加 Odometry模块,并选中话题odom。

下面我们选中rviz窗口,按下Ctrl+S,将会把当前的设置保存到urdf.rviz文件中。
保存后的urdf.rviz的内容如下:
Panels: - Class: rviz/Displays Help Height: 78 Name: Displays Property Tree Widget: Expanded: - /Global Options1 - /Status1 - /RobotModel1 - /RobotModel1/Links1 - /TF1 - /TF1/Tree1/odom1 - /TF1/Tree1/odom1/base_link1 Splitter Ratio: 0.5 Tree Height: 561 - Class: rviz/Selection Name: Selection - Class: rviz/Tool Properties Expanded: - /2D Pose Estimate1 - /2D Nav Goal1 - /Publish Point1 Name: Tool Properties Splitter Ratio: 0.588679016 - Class: rviz/Views Expanded: - /Current View1 Name: Views Splitter Ratio: 0.5 - Class: rviz/Time Experimental: false Name: Time SyncMode: 0 SyncSource: "" Visualization Manager: Class: "" Displays: - Alpha: 0.5 Cell Size: 1 Class: rviz/Grid Color: 160; 160; 164 Enabled: true Line Style: Line Width: 0.0299999993 Value: Lines Name: Grid Normal Cell Count: 0 Offset: X: 0 Y: 0 Z: 0 Plane: XY Plane Cell Count: 10 Reference Frame: <Fixed Frame> Value: true - Alpha: 0.5 Class: rviz/RobotModel Collision Enabled: false Enabled: true Links: All Links Enabled: true Expand Joint Details: false Expand Link Details: false Expand Tree: false Link Tree Style: Links in Alphabetic Order base_link: Alpha: 1 Show Axes: false Show Trail: false Value: true head: Alpha: 1 Show Axes: false Show Trail: false Value: true left_back_wheel: Alpha: 1 Show Axes: false Show Trail: false Value: true left_front_wheel: Alpha: 1 Show Axes: false Show Trail: false Value: true right_back_wheel: Alpha: 1 Show Axes: false Show Trail: false Value: true right_front_wheel: Alpha: 1 Show Axes: false Show Trail: false Value: true Name: RobotModel Robot Description: robot_description TF Prefix: "" Update Interval: 0 Value: true Visual Enabled: true - Class: rviz/TF Enabled: true Frame Timeout: 15 Frames: All Enabled: true base_link: Value: true head: Value: true left_back_wheel: Value: true left_front_link: Value: true left_front_wheel: Value: true odom: Value: true right_back_wheel: Value: true right_front_link: Value: true right_front_wheel: Value: true Marker Scale: 0.5 Name: TF Show Arrows: true Show Axes: true Show Names: true Tree: odom: base_link: head: {} left_back_wheel: {} left_front_link: {} left_front_wheel: {} right_back_wheel: {} right_front_link: {} right_front_wheel: {} Update Interval: 0 Value: true - Angle Tolerance: 0.100000001 Class: rviz/Odometry Covariance: Orientation: Alpha: 0.5 Color: 255; 255; 127 Color Style: Unique Frame: Local Offset: 1 Scale: 1 Value: true Position: Alpha: 0.300000012 Color: 204; 51; 204 Scale: 1 Value: true Value: true Enabled: true Keep: 100 Name: Odometry Position Tolerance: 0.100000001 Shape: Alpha: 1 Axes Length: 1 Axes Radius: 0.100000001 Color: 255; 25; 0 Head Length: 0.300000012 Head Radius: 0.100000001 Shaft Length: 1 Shaft Radius: 0.0500000007 Value: Arrow Topic: /odom Unreliable: false Value: true Enabled: true Global Options: Background Color: 48; 48; 48 Default Light: true Fixed Frame: odom Frame Rate: 30 Name: root Tools: - Class: rviz/Interact Hide Inactive Objects: true - Class: rviz/MoveCamera - Class: rviz/Select - Class: rviz/FocusCamera - Class: rviz/Measure - Class: rviz/SetInitialPose Topic: /initialpose - Class: rviz/SetGoal Topic: /move_base_simple/goal - Class: rviz/PublishPoint Single click: true Topic: /clicked_point Value: true Views: Current: Class: rviz/Orbit Distance: 6.47174978 Enable Stereo Rendering: Stereo Eye Separation: 0.0599999987 Stereo Focal Distance: 1 Swap Stereo Eyes: false Value: false Focal Point: X: 0 Y: 0 Z: 0 Focal Shape Fixed Size: true Focal Shape Size: 0.0500000007 Invert Z Axis: false Name: Current View Near Clip Distance: 0.00999999978 Pitch: 0.695397019 Target Frame: <Fixed Frame> Value: Orbit (rviz) Yaw: 0.513581991 Saved: ~ Window Geometry: Displays: collapsed: false Height: 848 Hide Left Dock: false Hide Right Dock: false QMainWindow State: 000000ff00000000fd00000004000000000000016a000002c0fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006400fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c0061007900730100000028000002c0000000dd00fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f000002c0fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a005600690065007700730100000028000002c0000000b000fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004c000000044fc0100000002fb0000000800540069006d00650100000000000004c00000030000fffffffb0000000800540069006d006501000000000000045000000000000000000000023b000002c000000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000 Selection: collapsed: false Time: collapsed: false Tool Properties: collapsed: false Views: collapsed: false Width: 1216 X: 65 Y: 24