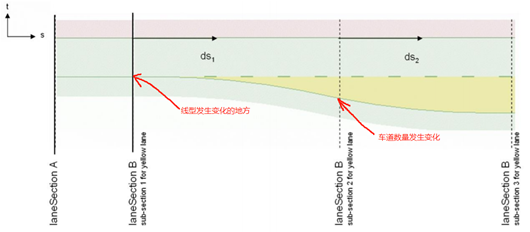
同一条道路车道数量发生变化的时候,要进行一个新的laneSection.
3.3.3 lane sections
3.3.3车道横截面
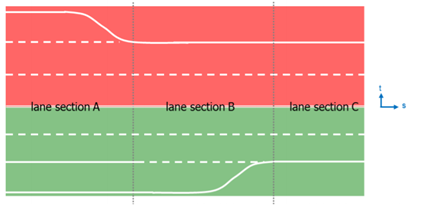
the lanes appearing in a given cross-section along the road are defined in so-called lane sections. multiple lane sections may be defined in ascending order along a reference line. each lane section is valid until the next lane section is defined. therefore, in order to be usable, each road must at least be equipped with one lane section starting at s= 0.0m. the following figure depicts the principles of lane sections:
沿着道路出现在给定横断面上的车道被定义为所谓的车道段.多车道段可以沿参考线按升序定义。在定义下一个车道横截面之前,每个车道段都是有效的。因此,为了便于使用,每条道路至少必须配备一个车道横截面,从s=0.0m开始。下图显示车道分段的原则:
per lane section, the number of lanes is constant. however, the properties of each lane (e.g. width, road marks, friction etc.) may change.
每个车道横断面,车道数是不变的(意味着不同的车道横断面,车道数量发生变化)。然而,每个车道的特性(如宽度、道路标志、摩擦系数(或译成摩擦力)等)可能会改变。
---------------------------------------------------------------------
在lanes下还有个laneSection车道横截面的概念,一个road包含了数个laneSection,每个laneSection中又包含了车道lane,在一个laneSection中车道lane是顺着reference line分为left,center,right。
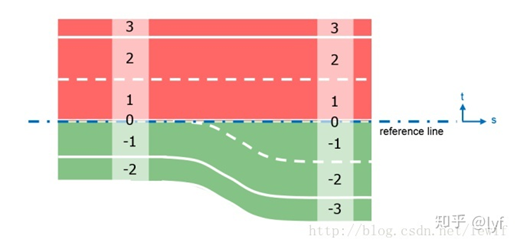
reference line是center,没有宽度width,只是一条线。
left的lane的id为正,right为负。上图中坐边定义了5条车道,1,2,3,-1,-2,而右边多了一条-3。
此外,在lane元素中,width元素定义了车道的宽度,都是基于曲线进行拟合的。roadMark元素定义了车道线的属性,OpenDrive中规定的车道线的属性如下所示,有实线,虚线等。
链接:https://zhuanlan.zhihu.com/p/67202589
来源:知乎
---------------------------------------------------------------------
总结:
《智能汽车电子地图数据模型与交换格式-20161121.pdf》中的表述:
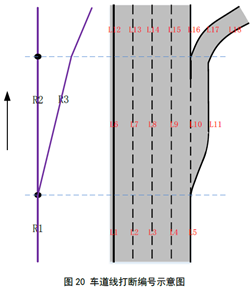
(11)车道线打断原则
- 在导航道路数据对应打断位置,以参考线为基准对车道分隔线打断;
- 在车道数量发生变化的位置以参考线为基准对车道分隔线打断;
- 车道分隔线中存在车道类型发生变化时,以参考线为基准对车道分隔线打断;
- 在车道分隔线打断的位置车道中心线也需要打断,见图20。
before opendrive 1.4 it was mandatory that each lane section comprised the definition of all lanes for both directions of a road. in certain cases (e.g. where an addition or subtraction of lanes happens on one side of a road only or where the number of lanes changes on both sides but with a slight longitudinal offset), this could lead to restrictions or increased effort for the definition of complex road layouts.
在opendrive1.4之前,每一车道段必须包含一条道路双向的所有车道的定义。在某些情况下(例如,车道的增减仅发生在道路的一侧,或者两边的车道数目发生变化,但纵向相距较小),这可能导致限制或加大对复杂道路布局定义的努力。
---------------------------------------------------------------------
一条道路可以被切分为很多个Section。按照道路车道数量变化、道路实线和虚线的变化、道路属性的变化的原则来对道路进行切分。
Junction是OpenDRIVE格式规范中的路口概念。Junction中包含虚拟路,虚拟路用来连接可通行方向,用红色虚线来表示。
在OpenDRIVE里,所有对车道线的描述都基于Reference Line的偏移量。
在一张地图中,在遇到对路口的表述时,虽然说路口没有线,但我们要用虚拟线来连接道路的可通行方向,以便无人驾驶车辆明确行进路线。
Tracking的坐标系是s t,s代表车道Reference Line起点的偏移量,t代表基于Reference Line的横向偏移量,前者是纵向的,后者是横向的。
https://blog.csdn.net/cg129054036/article/details/87549320
---------------------------------------------------------------------
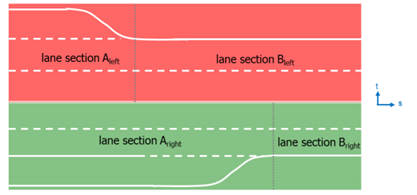
the following figure illustrates the classical definition of a typical motorway entry/exit with longitudinal offset of the respective entry / exit lanes:
下图说明了带有各进出口车道纵向偏移的典型高速公路入口/出口的典型定义:
starting from opendrive 1.4, lane sections may be valid for one side (driving direction) of the road only. therefore, the above example may be simplified as follows:
由opendrive 1.4(2015.11.4)起,车道片段只对道路的一侧(驾驶方向)有效。因此,上述示例可简化如下:
总结:
LaneSection的区分原则就是:
1.车道数量发生的变化的地方;
2.车道线由实线变成虚线或者由虚线变成实线的时候。