https://zhuanlan.zhihu.com/p/57215172
很多时候在python里面你要找一个3D点云可视化的库真的是难啊。你的选择可能是:
- pcl
- mayavi
- matplolib
但是以上都不好用,pcl甚至没有靠谱的python wrapper,唯一一个开源的已经很久没有维护了。在3D显示或者点云处理中,效率是很重要的,不能岁岁便便用一个假的框架。此时一个由intel发布的Open3D出现了。
我在上一篇分享中也提到过open3d可以将pointnet++推理速度提速的到10fps以内。非常有用。(要知道点云的分割可是非常好时的)。
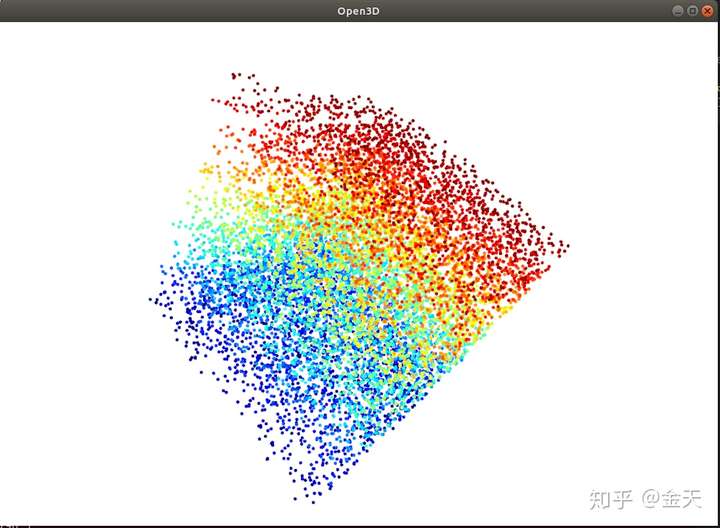
open3d 显示点云的效果。它的安装非常简单:
pip3 install open3d-python导入的时候打概率可能因为IPYthon导致出错,安装IPython就行。实力程序:
import os import numpy as np from open3d import * points = np.random.rand(10000, 3) point_cloud = PointCloud() point_cloud.points = Vector3dVector(points) draw_geometries([point_cloud])
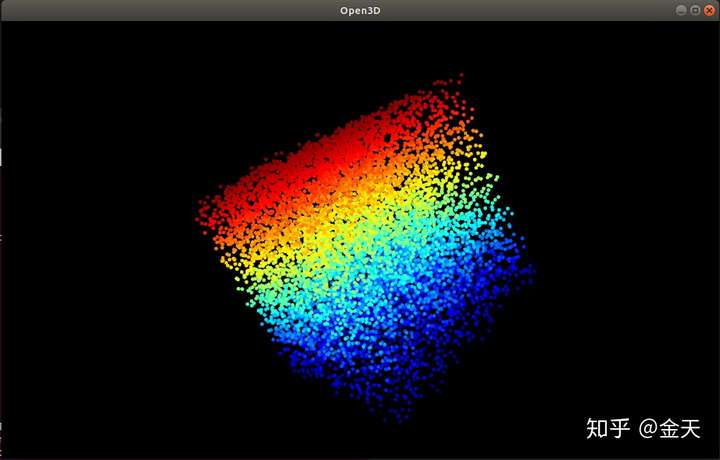
Open3D的真正强大之处不在于精简的显示点云,而是一些自定义的功能,这个在可视化的时候非常有用。
比如我们可以添加自定义的 draw_geometries 函数,显示结果可以:
def custom_draw_geometry_with_key_callback(pcd): def change_background_to_black(vis): opt = vis.get_render_option() opt.background_color = np.asarray([0, 0, 0]) return False def load_render_option(vis): vis.get_render_option().load_from_json( "../../TestData/renderoption.json") return False def capture_depth(vis): depth = vis.capture_depth_float_buffer() plt.imshow(np.asarray(depth)) plt.show() return False def capture_image(vis): image = vis.capture_screen_float_buffer() plt.imshow(np.asarray(image)) plt.show() return False key_to_callback = {} key_to_callback[ord("K")] = change_background_to_black key_to_callback[ord("R")] = load_render_option key_to_callback[ord(",")] = capture_depth key_to_callback[ord(".")] = capture_image draw_geometries_with_key_callbacks([pcd], key_to_callback) custom_draw_geometry_with_key_callback(point_cloud)
看着还不错。本来想显示一下kitti点云的。但是好像有的点是4的倍数有的是5的倍数, 这,,,这怎么reshape?