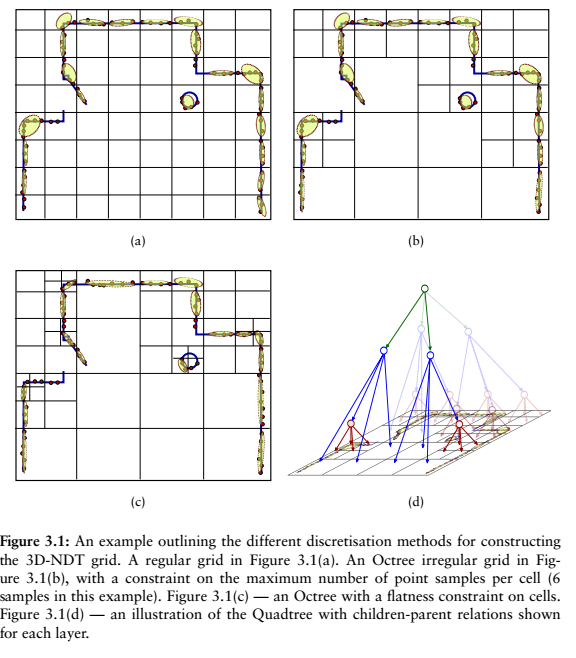
点云八叉树分割 八叉树分割的终止标准: (1)最小体素尺寸 (2)一个预定义的最大深度的树 (3)每个体素的样本点的最大数目 (4)平面拟合残差阈值r和最小体素的大小d 参考文献: 基于八叉树的区域增长点云分割算法 https://github.com/brandonpelfrey/SimpleOctree