基于CloudCompare开发的提取ISS3D关键点。
1 void qLxPluginPCL::doISS3D() 2 { 3 assert(m_app); 4 if (!m_app) 5 return; 6 7 const ccHObject::Container& selectedEntities = m_app->getSelectedEntities(); 8 size_t selNum = selectedEntities.size(); 9 if (selNum!=1) 10 { 11 m_app->dispToConsole("Select only one cloud!",ccMainAppInterface::ERR_CONSOLE_MESSAGE); 12 return; 13 } 14 15 ccHObject* ent = selectedEntities[0]; 16 assert(ent); 17 if (!ent || !ent->isA(CC_TYPES::POINT_CLOUD)) 18 { 19 m_app->dispToConsole("Select a real point cloud!",ccMainAppInterface::ERR_CONSOLE_MESSAGE); 20 return; 21 } 22 23 ccPointCloud* m_cc_cloud = static_cast<ccPointCloud*>(ent); 24 25 26 //input cloud 27 unsigned count = m_cc_cloud->size(); 28 bool hasNorms = m_cc_cloud->hasNormals(); 29 CCVector3 bbMin, bbMax; 30 m_cc_cloud->getBoundingBox(bbMin,bbMax); 31 const CCVector3d& globalShift = m_cc_cloud->getGlobalShift(); 32 double globalScale = m_cc_cloud->getGlobalScale(); 33 34 ccIss3Ddlg dlg; 35 if (!dlg.exec()) 36 return; 37 38 double s_SalientRadius=dlg.sbSalientRadius->value(); 39 double s_NonMaxRadius =dlg.spNonMaxRadius->value(); 40 double s_Threshold21 = dlg.spThreshold21->value(); 41 double s_Threshold32 = dlg.spThreshold32->value(); 42 43 pcl::PointCloud<PointXYZ>::Ptr pcl_cloud (new pcl::PointCloud<PointXYZ>); 44 try 45 { 46 unsigned pointCount = m_cc_cloud->size(); 47 pcl_cloud->resize(pointCount); 48 49 for (unsigned i = 0; i < pointCount; ++i) 50 { 51 const CCVector3* P = m_cc_cloud->getPoint(i); 52 pcl_cloud->at(i).x = static_cast<float>(P->x); 53 pcl_cloud->at(i).y = static_cast<float>(P->y); 54 pcl_cloud->at(i).z = static_cast<float>(P->z); 55 } 56 } 57 catch(...) 58 { 59 //any error (memory, etc.) 60 pcl_cloud.reset(); 61 } 62 63 printf("读取了data点云数据:%d ",pcl_cloud->size()); 64 65 pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ> ()); 66 67 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_out (new pcl::PointCloud<pcl::PointXYZ>); 68 69 pcl::ISSKeypoint3D<pcl::PointXYZ,pcl::PointXYZ> iss_detector; 70 iss_detector.setSearchMethod (tree); 71 iss_detector.setSalientRadius(s_SalientRadius); 72 iss_detector.setNonMaxRadius(s_NonMaxRadius); 73 /*iss_detector.setSalientRadius(2.0f); 74 iss_detector.setNonMaxRadius(1.6f);*/ 75 iss_detector.setInputCloud(pcl_cloud); 76 /*iss_detector.setThreshold21 (0.975); 77 iss_detector.setThreshold32 (0.975);*/ 78 iss_detector.setThreshold21 (s_Threshold21); 79 iss_detector.setThreshold32 (s_Threshold32); 80 iss_detector.setMinNeighbors (5); 81 iss_detector.setNumberOfThreads (4); 82 cout<<"parameter set successful"<<endl; 83 iss_detector.compute(*cloud_out); 84 85 int pointCount = cloud_out->size(); 86 87 //static_cast<size_t>(sm_cloud ? sm_cloud->width * sm_cloud->height : 0); 88 89 ccPointCloud* ccCloud =new ccPointCloud(); 90 if (!ccCloud->reserve(static_cast<unsigned>(pointCount))) 91 return ; 92 for (size_t i = 0; i < pointCount; ++i) 93 { 94 CCVector3 P(cloud_out->at(i).x,cloud_out->at(i).y,cloud_out->at(i).z); 95 ccCloud->addPoint(P); 96 } 97 ccCloud->setName(QString("ISS3D")); 98 ccColor::Rgb col = ccColor::Generator::Random(); 99 ccCloud->setRGBColor(col); 100 ccCloud->showColors(true); 101 ccCloud->setPointSize(5); 102 ccHObject* group = 0; 103 if (!group) 104 group = new ccHObject(QString("ISS3D").arg(ent->getName())); 105 group->addChild(ccCloud); 106 group->setVisible(true); 107 m_app->addToDB(group); 108 }
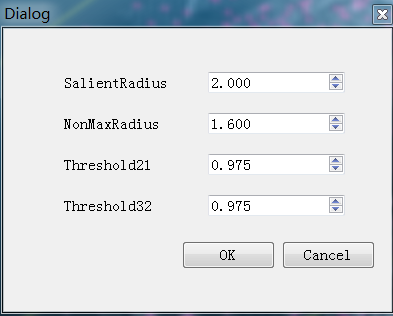
界面: