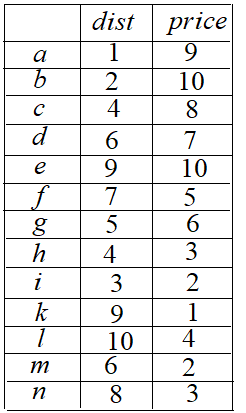
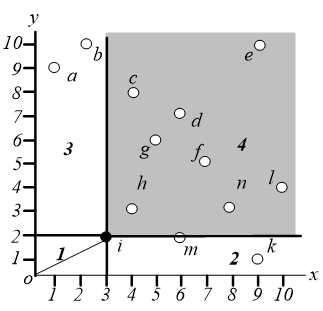
假设一个数据库存储每个酒店的以下信息:它的价格(夜间价格)、离海滩的距离。用户希望检索“最佳”酒店,如何比较两个酒店的质量呢?
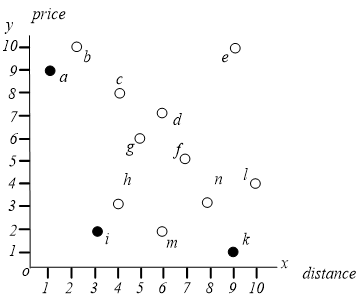
$a$ 比 $b$ 好吗?是的,$a$ 酒店比 $b$ 酒店更便宜,而且离海滩更近,我们说 $a$ 支配 $b$。
$a$ 是不是比 $i$ 好呢?它们是不可比的。一些用户可能更喜欢 $a$(因为它离海滩更近),而另一些用户可能更喜欢 $i$(因为它更便宜)。
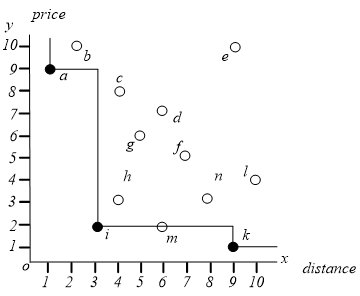
skyline 包含了所有不受其它酒店支配的酒店。skyline = $left { a,i,k ight }$,而非 skyline 酒店在大多数情况下不会被用户考虑。
skyline 查询算法用到了两个重要的性质:
1)支配传递性:如果 $p_1$ 支配 $p_2$,$p_2$ 支配 $p_3$,那么我们就有 $p_1$ 支配 $p_3$。
2)如果一个点不能支配另一个点,那么反之亦然。
1. Block Nested Loop (BNL)
这个是最基本的查询算法,通过暴力搜索,判断每个酒店是否有被其他酒店支配,平方时间复杂度。
2. Sort First Skyline (SFS)
SFS是一种改进的BNL。首先根据(单调)偏好函数对整个数据集按某个维度进行排序。然后按 BNL 算法计算。
3. SCAN 扫描算法
顺序扫描表格,扫描过程中维护可能成为 skyline 点的列表,假设内存允许在 List 中最多保留 $3$ 个条目。
首先初始化 List,即将 $a$ 加入 List —— List = $left { a ight }$,接下来顺序扫描表格中的其它点,做如下两个判断:
a. 当前扫描到的点是否被 List 内的点所支配,如果没有被支配则执行步骤 $b$;否则将该点舍弃,然后扫描下一个点。
b. 当前扫描到的点是否支配 List 内的点,如果是则删除 List 内所有被当前点支配的点,然后执行步骤 $c$。
c. 判断 List 内的元素是否达到元素上限,如果没有,则将该点加入 List,否则将该点写入磁盘,并对当前 List 内的点做标记,只有第一次
溢出时做标记,表示当前了 List 内的点和磁盘上的点互不支配。
以上面酒店为例,它的 SACN 扫描算法过程如下:
1)因为 $a$ 支配 $b$,所以丢弃 $b$,被舍弃的点不会成为 skyline 点,如果 $b$ 会支配其它的点,那么这个点必然也被 $a$ 支配。
2)因为 $c$ 不被 List 里面的点支配,也不支配 List 里的点,所以 $c$ 加入 List —— List = $left { a,c ight }$。
4)因为 $d$ 不被 List 里面的点支配,也不支配 List 里的点,所以 $d$ 加入 List —— List = $left { a,c,d ight }$。
5)因为 $a$ 支配 $e$,所以丢弃 $e$。
6)$f$ 应该加入 List,但 List 已经满了,所以将 $f$ 写入磁盘文件,并标记所有当时在 List中的点 —— List = $left { a^{'},c^{'},d^{'} ight }$, File = $left { f ight }$。
7)因为 $g$ 支配 List 里面的 $d$,所以用 $g$ 替换 $d$ —— List = $left { a^{'},c^{'},g ight }$, File = $left { f ight }$,$g$ 是没有标记的。
8)因为 $h$ 支配 List 中的 $c,g$,所以用 $h$ 替换 $c,g$ —— List = $left { a^{'},h ight }$, File = $left { f ight }$
....
9)因为 $i$ 支配 $h$,所以用 $i$ 替换 $h$ —— List = $left { a^{'},i ight }$, File = $left { f ight }$
10)List = $left { a^{'},i,k ight }$, File = $left { f ight }$
11)$l,m,n$ 均被舍弃。
12)List 中有标记的点就是 skyline 点,然后还要针对 file 再做一遍 SCAN。
13)结果 $S = left { a,i,k ight }$。
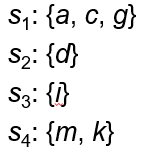
4. Divide and Conquer (D&C)
把点分成几组,使得每组的数据都能够放进内存。分别处理这些组,然后合并它们的结果。$s_3$ 内的点直接成为 skyline,$s_4$ 内的点
直接舍去,因为它们显然会被 $s_3$ 内的点支配,然后用 $s_3$ 内的点来消除 $s_1$ 和 $s_4$ 中的非 skyline 点。

5. Nearest Neighbor (NN)
通过 $R$ 树的 $NN$ 算法来找 Skyline 点。
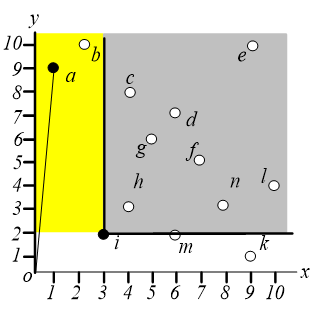
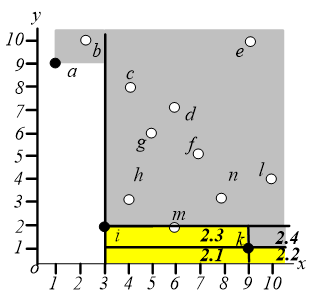
首先找到数据空间中距离原点最近的一个点,一般来说,任何距离指标都可以。这样我们就可以找到点 $i$,这个点必然是一个 skyline 点。
对于点 $i$,我们不需要考虑阴影区域中的那些点。区域 $1$ 也不需要考虑。事实上,在这个地区是没有意义的。区域 $2$ 和区域 $3$ 必须进一步探索。

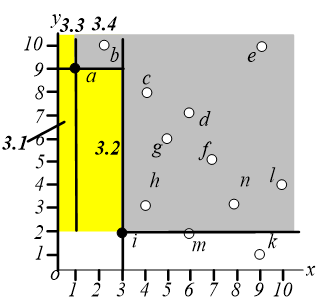
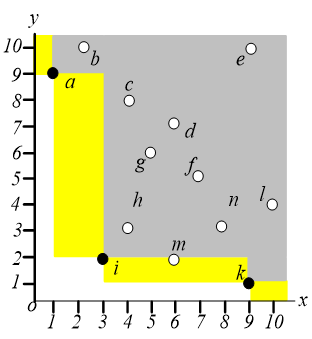
在区域 $3$ 中执行相同的操作,即找距离原点最近的点,这样就可以找到点 $a$,如下图,同样地,我们只需要关心区域 $3.2$ 和 $3.3$。
在区域 $2$ 中搜索离原点最近的点,可以找到 $k$ 点。
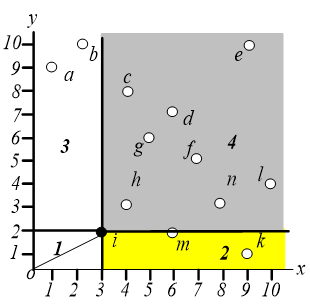
这个算法会经过 $3$ 次有效的 $NN$ 查询和 $4$ 次空查询。一般来说,如果 skyline 有 $s$ 个点,那么 $NN$ 执行 $s$ 次有用的 $NN$ 查询和 $s+1$ 次空查询。
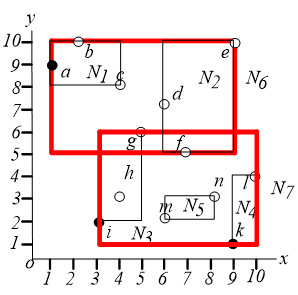
6. Branch and Bound Skyline (BBS)
基于best-first NN算法实现。首先建立 $R$ 树。
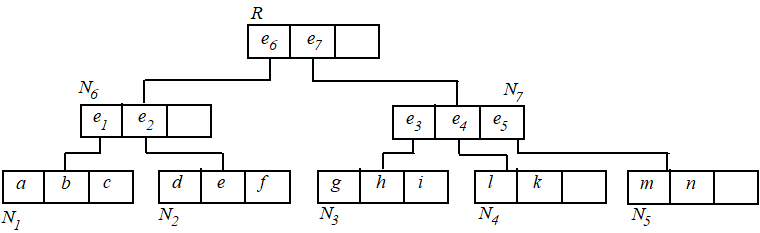
从根节点开始,算法过程如下:
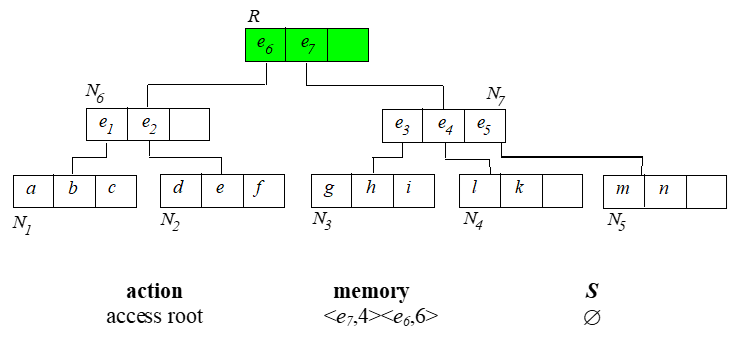
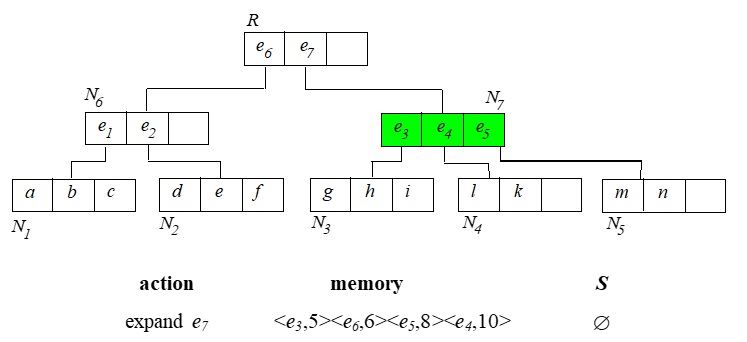
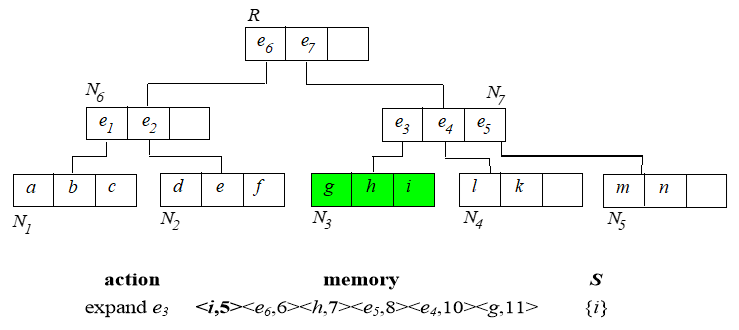
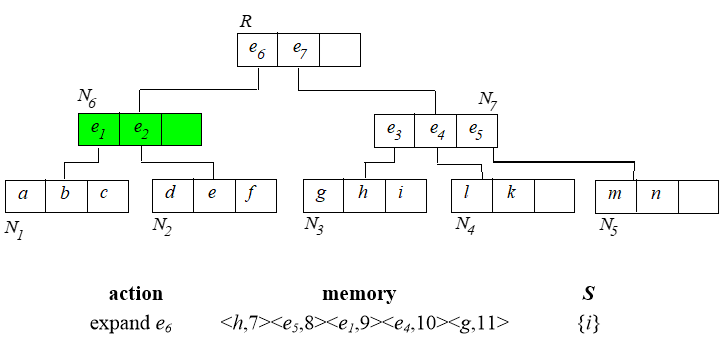
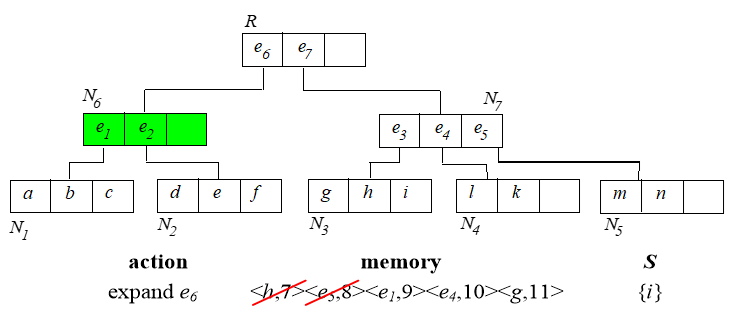
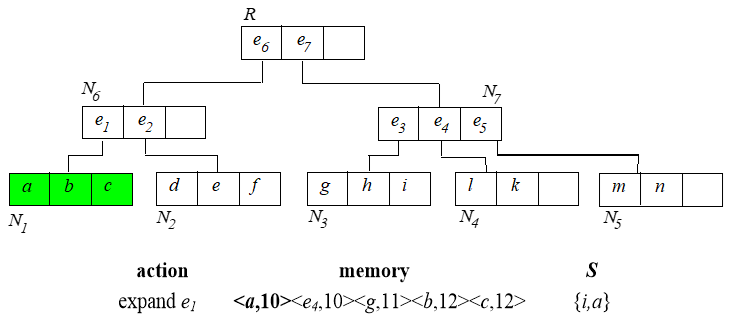
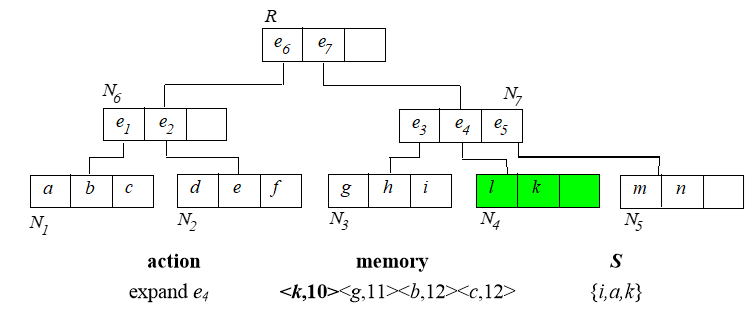
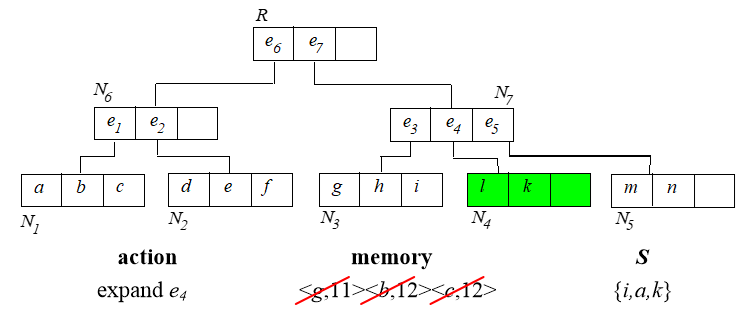
已经找到的 skyline 需要用来淘汰内存中排序的那些点。