机电传动控制第二周学习笔记
机卓1301班 胡广宙
电机发展史阅读
电机作为实现各类一次能源,机械能和电能间转换的电磁机械装置,在生产生活中有着不可替代的作用。原动机将各类一次能源转换为机械能,而发电机再将机械能转换为电能,一直以来火力发电是我国的主要发电方式,火力发电通过化石燃料燃烧产生过热蒸汽,蒸汽驱动汽轮机转动带动发电机转子旋转切割磁感线而产生电能。火力发电需要消耗大量化石能源同时对环境造成严重污染,因此近年来我国在不断推行水电、风电和核电等清洁可持续的发电方式。风力发电是利用风力带动叶片转动,在增速机的提速下促使发电机发电,2015年11月,单机容量5MW,转轮直径128米,轮毂中心高度达81米的我国海上最大风力发电机在福建安装成功。水力发电则是将水的重力势能转换为水轮的机械能推动发电机发电。自2010年我国云南华能小湾水电站四号机组(装机70万千瓦)正式投产发电我国已成为水力发电总装机容量第一的国家。核能发电则是利用核反应堆核裂变释放的热能发电。
电磁感应定律的发现揭开了发电机发展的序幕,早期的发电机均为直流发电机,后来通过鼓形电枢绕组提高了电枢导线的利用率,而开槽结构有效减少了铜损(铜线内部的涡流损耗),叠片式铁心结构有效减少了铁损。旋转磁场的获得使交流感应电动机的发明成为可能。三相电力系统结构简单而可靠,它的出现使交流电更便于输送和分配。在上世纪末三相同步发电机逐渐划分为高速和低速两类,汽轮发电机和水轮发电机分为成为高速和低速发电机的代表。在电机发展过程中电机的材料利用率不断提高,发电机的体积质量不断减小而单机容量不断增加。对称分量法的提出为求解三项不对称问题提供了新的想法。电力系统中发电机,变压器,电抗器,电动机都是三相对称元件,经过充分换位的输电线基本也是三相对称的,对于这种三相对称系统的分析计算可以方便地用单相电路的方法求解。任何不对称的三相相量可以分解为三组相序不同的对称分量,任何三相不平衡的电流、电压或阻抗都可以分解成为三个平衡的相量成分即正相序、负相序和零相序。
基于功率交换的机电系统物理建模思想与方法阅读
工程系统具有多通口,对于机械平动通口系统、机械转动通口系统、液压通口系统、电通口系统,它们的主要物理量都可以统一为势变量e、流变量f、广义动量p、广义位移q,而通过功率与能量相等可以建立各工程系统间的联系使系统通口间相连接,以下表格列出了各系统中相对应于势变量、流变量、广义动量、广义位移的物理量,各系统的对应物理量均构成了e、f、p、q组成的状态四面体,两个多通口系统连接起来后的通口具有共同的键,其势变量与流变量相同。键合图将子系统用表示功率键的线连接组合,键合图的描述模型以文字对主要子系统进行描述。
|
广义变量 |
机械平动 |
机械转动 |
液压变量 |
国际单位 |
|
势变量e |
力F |
转矩τ |
压力P |
N |
|
流变量f |
速度v |
角速度ω |
流量Q |
m/s |
|
广义动量p |
动量P |
角动量P |
压力流量P |
N·s |
|
广义位移q |
位移X |
角度θ |
体积V |
m |
|
功率P |
F(v)V(t) |
τ(t)ω(t) |
P(t)Q(T) |
N·m/s |
|
能量E |
N·m |
表1.机械平动、机械转动、液压系统中的功率和能量变量
|
通用变量 |
势变量e |
流变量f |
广义动量p |
广义位移q |
功率P |
能量E |
|
电子变量 |
电压e |
电流i |
磁通链λ |
电荷q |
e(t)i(t) |
|
|
单位 |
V |
A |
Wb |
C=A·s |
W |
J |
表2.电通口系统的功率和能量变量
仿真作业练习代码及相关图形
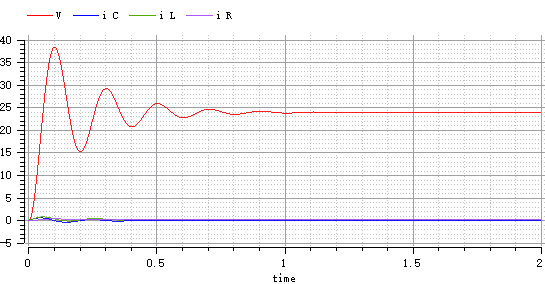
RLC振荡电路
model RLC1
type Voltage=Real(unit="V");
type Current=Real(unit="A");
type Resistance=Real(unit="Ohm");
type Capacitance=Real(unit="F");
type Inductance=Real(unit="H");
parameter Voltage Vb=24;
parameter Inductance L = 1;
parameter Resistance R = 100;
parameter Capacitance C = 1e-3;
Voltage V;
Current i_L;
Current i_R;
Current i_C;
equation
V = i_R*R;
C*der(V) = i_C;
L*der(i_L) = (Vb-V);
i_L=i_R+i_C;
end RLC1;
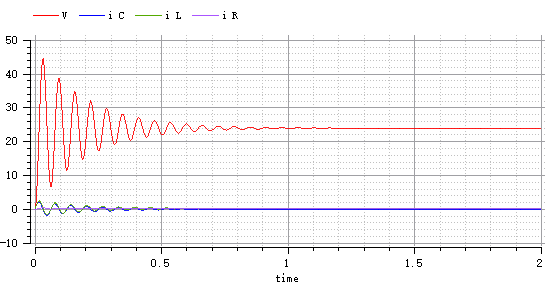
model RLC2
extends RLC1(L=0.1);
end RLC2;
model RLC3
extends RLC1(C=1e-2);
end RLC3;

RLC1是对示例中代码的执行结果,RLC2和RLC3是相对RLC1模型分别修改电感和电容的大小进行仿真分析的结果
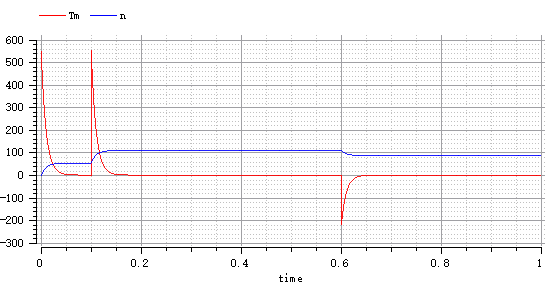
修改电机模型电压及电阻值仿真图形
model motor1
type Voltage=Real(unit="V");
type Inertia=Real(unit="kg.m2");
type Torque=Real(unit="N.m");
type Angularvelocity=Real(unit="rad/s");
type Flux=Real(unit="T");
type Rotatespeed=Real(unit="r/min");
type Time=Real(unit="s");
type Current=Real(unit="A");
type Resistance=Real(unit="Onm");
parameter Resistance R=0.1;
parameter Voltage u1=50;
parameter Voltage u2=100;
parameter Voltage u3=80;
parameter Real Kt=1.1;
parameter Real Ke=0.9;
parameter Time t1=0.1;
parameter Time t2=0.6;
parameter Torque Tl=2;
parameter Inertia J=0.01;
parameter Flux phi=1;
Torque Tm;
Rotatespeed n;
Angularvelocity omega;
Current i;
Voltage u;
equation
if time <= t1 then
u=u1;
elseif time <=t2 then
u=u2;
else
u=u3;
end if;
Tm-Tl = J*der(omega);
omega = 9.55*n;
Tm=Kt*i*phi;
u= i*R+Ke*n*phi;
end motor1;

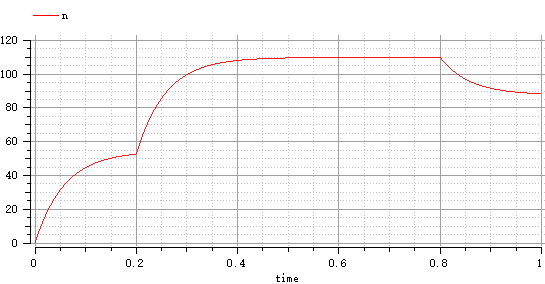
model motor2
extends motor1(R=0.6,t1=0.2,t2=0.8);
end motor2;

model motor3
extends motor1(u1=100,u2=10,u3=60);
end motor3;
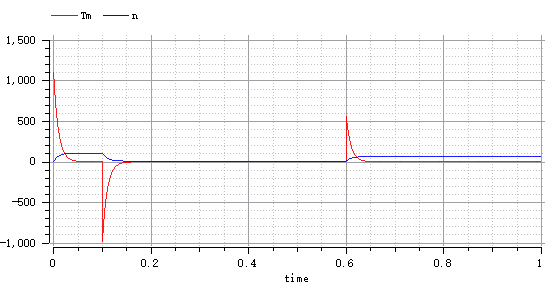
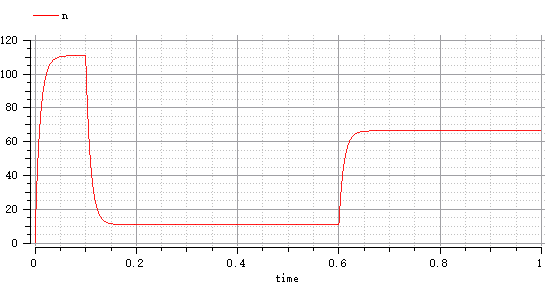
以上代码是对源代码修改后的执行结果,其中motor2对motor1模型进行了电阻值的修改,而motor3是对motor1的电源电压值变化情况进行修改,同时在源代码基础上考虑了角速度与转速间换算和磁通量的影响。