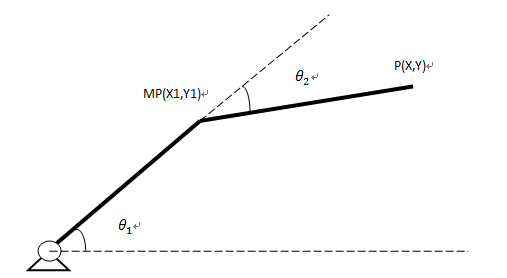
两关节是Scara的典型结构,其运动学、逆运动学及微分运动计算简单,以下以两关节长度相等为条件进行运动学计算演示,l为杆件1,2长度,杆件1起点为基座零点;
一、 正运动学

其中位置可描述为:

二、 逆运动学
已知当前点P(x,y),求关节1终点MP(x1,y1)
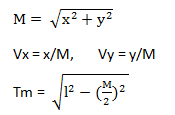
当MP设定在向量(Vx,Vy)逆时针侧:
x1 = x/2 - Tm*Vy y1=y/2 + Tm*Vx
当MP设定在向量(Vx,Vy)顺时针侧:
x1 = x/2 + Tm*Vy y1=y/2 - Tm*Vx
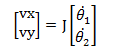
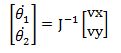
三、 微分运动:

其中雅可比矩阵:

行列式值:

速度(单位向量)矩阵: