ZYNQ包括一个 FPGA 和两个 ARM,多个 ARM 核心相对独立的运行不同的任务,每个核心可能运行不同的操作系统或裸机程序,但是有一个主要核心,用来控制整个系统以及其他从核心的允许。因此我们可以在 CPU0 和 CPU1 中独立跑不同的应用程序,发挥双核的非对称性架构的优势和性能。
从软件的角度来看,多核处理器的运行模式主要有三种:
① AMP(非对称多进程):多个核心相对独立的运行不同的任务,每个核心可能运行不同的操作系统或裸机程序,但是有一个主要核心,用来控制整个系统以及其它从核心的运行。
② SMP(对称多进程):一个操作系统同等的管理各个内核,例如 PC 机。
③ BMP(受约束多进程):与 SMP 类似,但开发者可以指定将某个任务仅在某个指定内核上执行默认情况下。
裸机程序 ZYNQ 仅运行一个 CPU,这里主要讲解 AMP 模式下,两个 CPU 同时运行的裸机程序开发方法。
一、核间中断原理(软中断SGI)
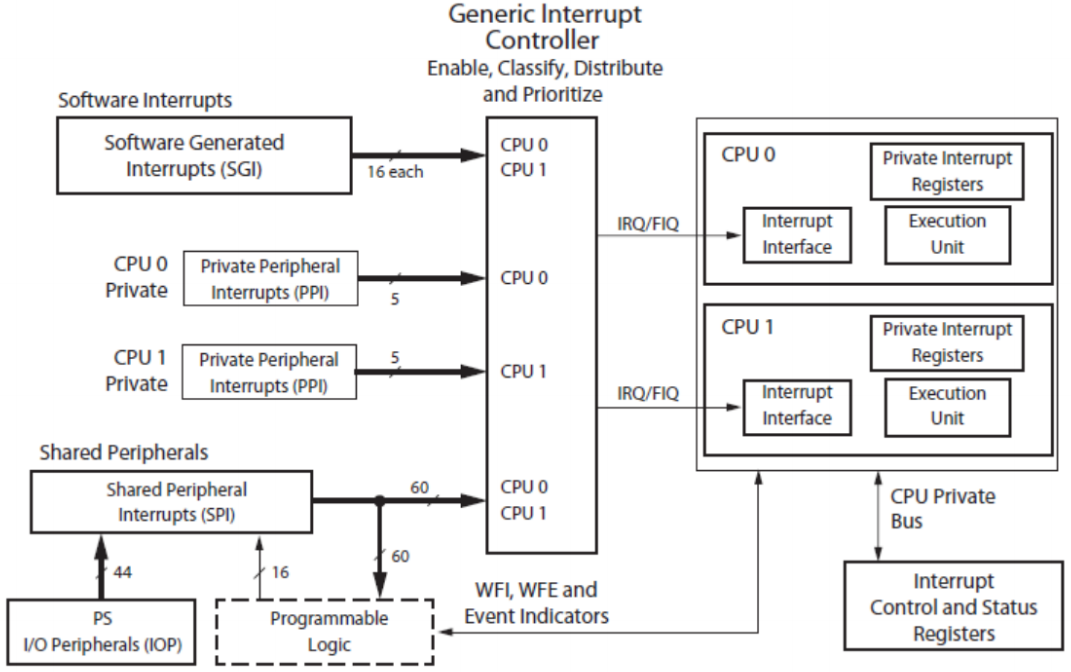

软中断的 ID 都是从0到15,并且都是上升沿触发,主要用于核间中断或者 CPU 自己中断自己。
中断函数如下:
XScuGic_SoftwareIntr(&InterruptController, //指向GIC指针 INTC_CPU0, //需要中断的CPU ID XSCUGIC_SPI_CPU0_MASK); //使能该CPU会接受中断
二、ARM启动过程
1.ARM 里有个 ROM,存储了一段程序,ROM起来后从 SD 卡读取数据 2.启动 FSBL(First Boot Loader)第一启动项(有模板) 3.加载 bit(FPGA配置程序),同时加载 elf(ARM应用程序),如果是操作系统则 elf 替换成 uBoot
三、搭建软件 CPU0 和 CPU1 非对称环境
1.创建 amp_fsbl 用于生成烧写镜像的时候加载 core0 和 core1的代码。
①启动 Vivado,创建 ZYNQ,勾选 SD卡 和 UART 即可,并加载 SDK 开发环境
②进到 SDK ,点击 File --- New --- Application Project,命名为 amp_fsbl 并选择 CPU0

③选择 FSBL,finish

④修改 main.c 函数来启动 core1,需要两个步骤,首先把 CPU1 应用程序地址写入到 0xfffffff0地址中,这是启动 CPU1 命令的地址,然后执行 sev 指令加载 CPU1 应用程序。具体参考 UG585 的启动代码章节。
在 main.c 函数的 main 函数上方插入这段代码:
1 #define sev() __asm__("sev") 2 #define CPU1STARTADR 0xFFFFFFF0 3 #define CPU1STARTMEM 0x2000000 4 5 void StartCpu1(void) 6 { 7 #if 1 8 fsbl_printf(DEBUG_GENERAL,"FSBL: Write the address of the application for CPU 1 to 0xFFFFFFF0 "); 9 Xil_Out32(CPU1STARTADR, CPU1STARTMEM); 10 dmb(); //waits until write has finished 11 fsbl_printf(DEBUG_GENERAL,"FSBL: Execute the SEV instruction to cause CPU 1 to wake up and jump to the application "); 12 sev(); 13 #endif 14 }
在 main.c 函数的 load镜像位置加入代码: StartCpu1();

2.创建 app_cpu0 应用程序
①重新创建一个新的 File --- New --- Application Project,命名为 app_cpu0,这时选择的是 CPU0

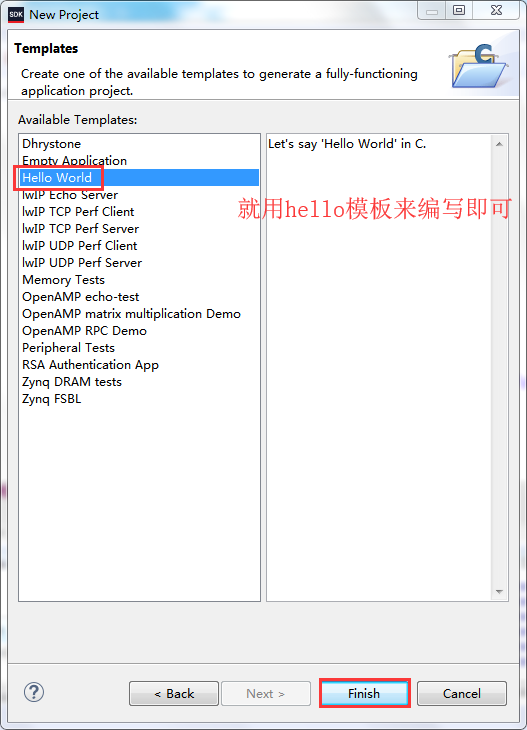
②选择 helloworld 模板即可
③将 helloworld.c 改名为 mian.c,并且用如下代码替换掉内容
1 #include <stdio.h> 2 #include "platform.h" 3 #include "xil_printf.h" 4 5 #define COMM_VAL (*(volatile unsigned long *)(0xFFFF0000)) //无优化无符号长整形地址转成指针 6 7 int main() 8 { 9 COMM_VAL=0; 10 11 //Disable cache on OCM 12 Xil_SetTlbAttributes(0xFFFF0000,0x14de2); 13 while(1) 14 { 15 print("Hello World cpu0 "); 16 COMM_VAL =1; 17 while(COMM_VAL == 1) 18 { 19 } 20 } 21 return 0; 22 }
该指针指向的地址为片上存储的共享内存(OCM)。可以指定这里面的任意一个地址。定义的指针变量如下所示: #define COMM_VAL (*(volatile unsigned long *)(0x00020000)) 该变量CPU0和CPU1都可以在里面读写数据,可以达到CPU0和CPU1的数据交互。OCM的地址如下图所示。


④打开 Scr 目录中的文件 lscript.ld,点击下方的 Source 做如下修改:CPU0 的代码空间改为 1E00000

CPU1运行程序的地址改为fsbl里面指定的起始地址。后面为长度,有一点需要注意:CPU0的起始地址加上CPU0的长度之后不能超过CPU1的起始地址。也就是两个CPU占用的DDR的地址不能重叠。若程序很大,则CPU0需要的LENGTH就大,因此CPU1的起始地址数值就大。DDR地址范围如下所示:

3.创建 app_cpu1 应用程序
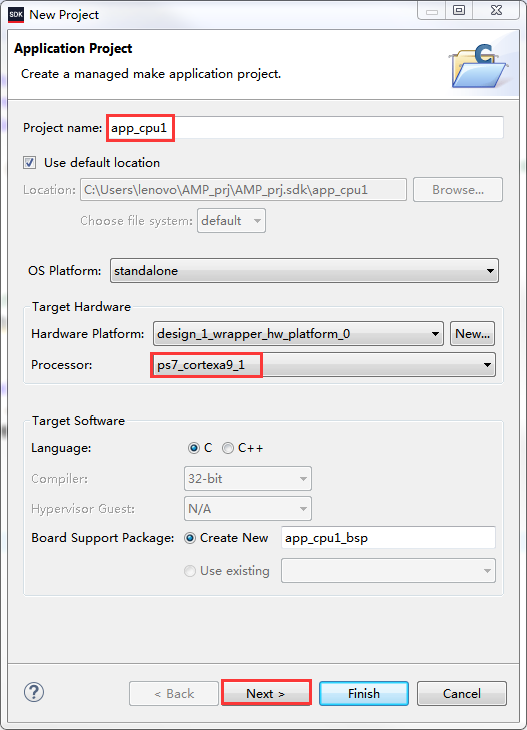
①重新创建一个新的 File --- New --- Application Project,命名为 app_cpu1,这时选择的是 CPU1
②选择 helloworld 模板即可

③将 helloworld.c 改名为 mian.c,并且用如下代码替换掉内容
1 #include <stdio.h> 2 #include "platform.h" 3 #include "xil_printf.h" 4 5 #define COMM_VAL (*(volatile unsigned long *)(0xFFFF0000)) 6 int main() 7 { 8 //Disable cache on OCM 9 Xil_SetTlbAttributes(0xFFFF0000,0x14de2); 10 while(1) 11 { 12 while(COMM_VAL == 0) 13 { 14 } 15 print("Hello World cpu1 "); 16 sleep(2); 17 COMM_VAL=0; 18 } 19 return 0; 20 }
④打开 Scr 目录中的文件 lscript.ld 点击下方的 Source 做如下修改起始地址改为 0x2000000 长度 0x1F00000

4.增加编译选项(设置 CPU1 的BSP setting 为 AMP 模式)
app_cpu1_bps --- 右键 --- Board Suport Package Setting,点击 driver --- ps7_cortexa9_0,添加指令

5.让双核跑起来
①点击 app_cpu0 --- 右键 --- Debug As --- Debug Configurations...
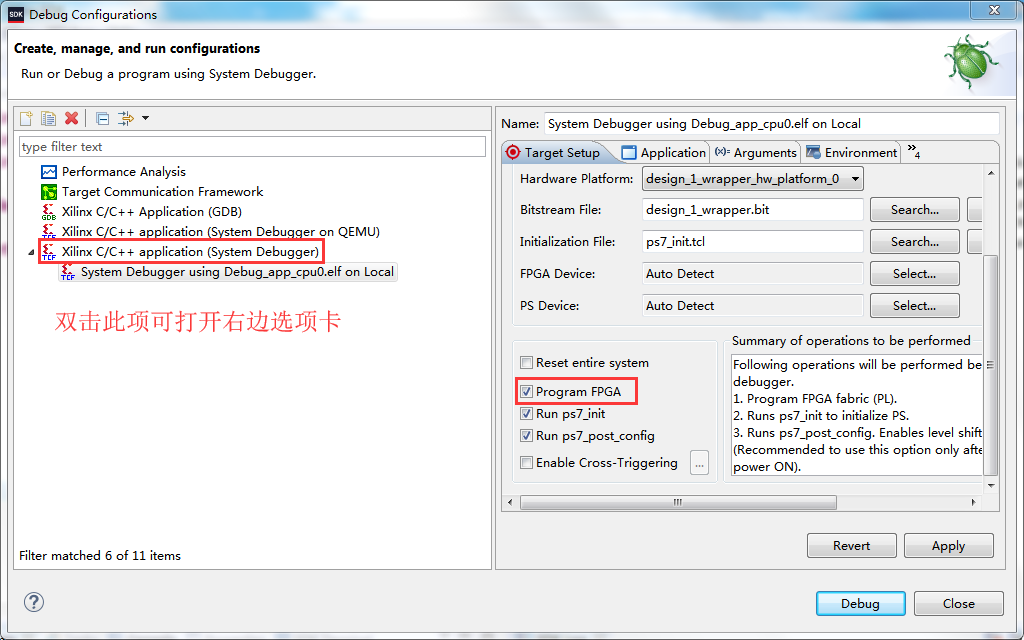
② 点击选项卡的 Application,勾选 0 和 1,然后点击 Debug,yes

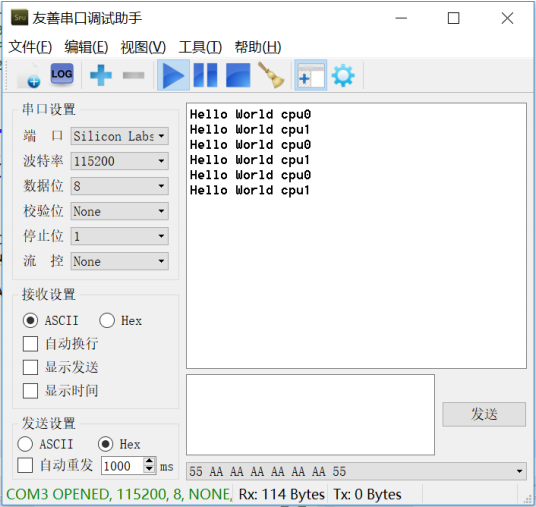
③默认停到第一行,连接好串口,选择APU --- ARM --- #0,单步慢慢走可以看到有信息打印出,#2也是一样的。如果让 #0 和 #1 都一直执行,则串口会一直交替打印。
四、软中断的注册和使用

参考资料:
[1]V3学院FPGA教程
[2]何宾, 张艳辉. Xilinx Zynq-7000嵌入式系统设计与实现[M]. 电子工业出版社, 2016.