源码地址:https://github.com/aitorzip/PyTorch-CycleGAN
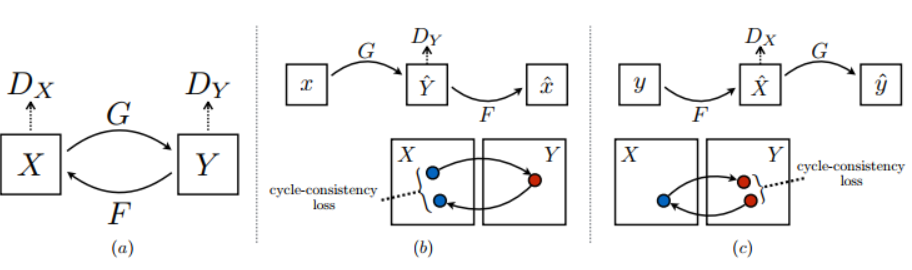
如图所示,cycleGAN的网络结构包括两个生成器G(X->Y)和F(Y->X),两个判别器Dx和Dy
生成器部分:网络整体上经过一个降采样然后上采样的过程,中间是一系列残差块,数目由实际情况确定,根据论文中所说,当输入分辨率为128x128,采用6个残差块,当输入分辨率为256x256甚至更高时,采用9个残差块,其源代码如下,
class Generator(nn.Module): def __init__(self, input_nc, output_nc, n_residual_blocks=9): super(Generator, self).__init__() # Initial convolution block model = [ nn.ReflectionPad2d(3), nn.Conv2d(input_nc, 64, 7), nn.InstanceNorm2d(64), nn.ReLU(inplace=True) ] # Downsampling in_features = 64 out_features = in_features*2 for _ in range(2): model += [ nn.Conv2d(in_features, out_features, 3, stride=2, padding=1), nn.InstanceNorm2d(out_features), nn.ReLU(inplace=True) ] in_features = out_features out_features = in_features*2 # Residual blocks for _ in range(n_residual_blocks): model += [ResidualBlock(in_features)] # Upsampling out_features = in_features//2 for _ in range(2): model += [ nn.ConvTranspose2d(in_features, out_features, 3, stride=2, padding=1, output_padding=1), nn.InstanceNorm2d(out_features), nn.ReLU(inplace=True) ] in_features = out_features out_features = in_features//2 # Output layer model += [ nn.ReflectionPad2d(3), nn.Conv2d(64, output_nc, 7), nn.Tanh() ] self.model = nn.Sequential(*model) def forward(self, x): return self.model(x)
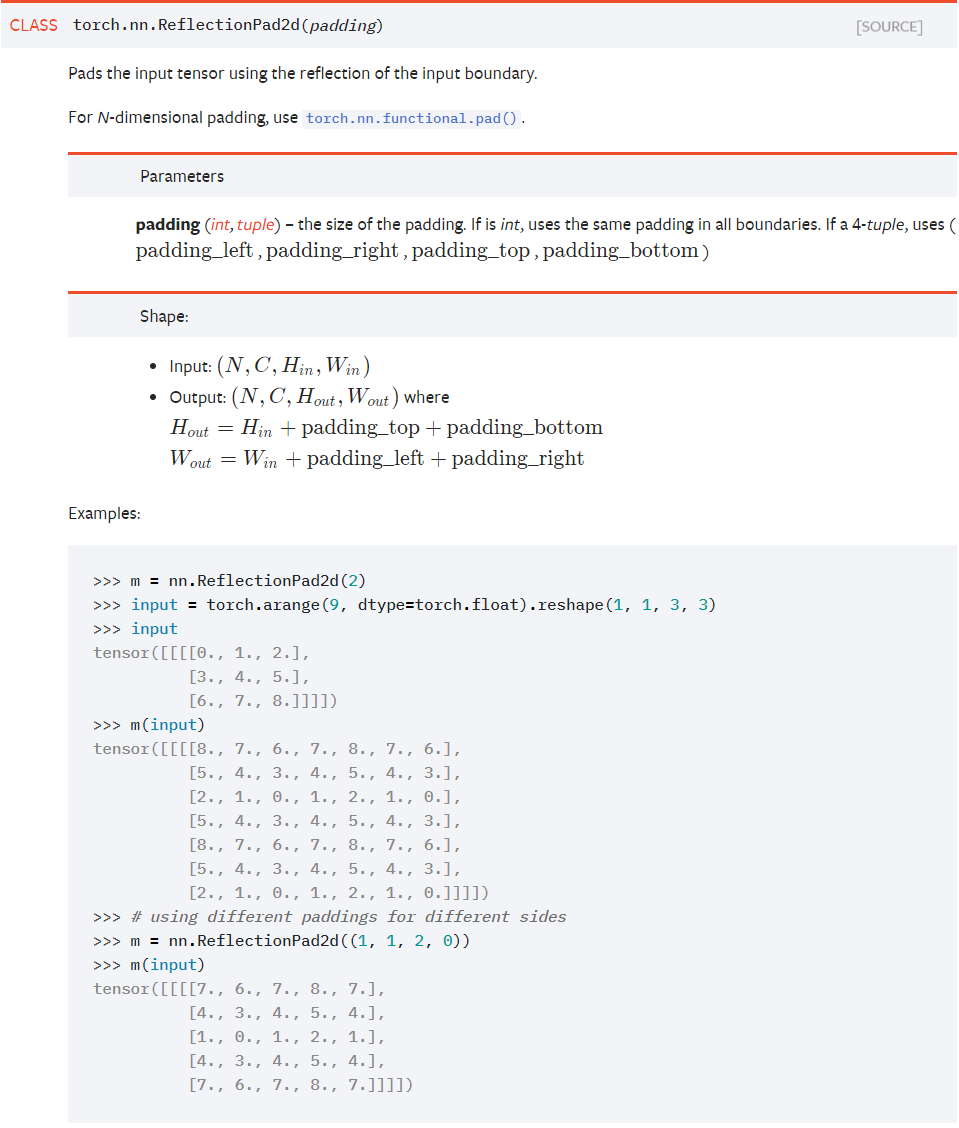
其中,值得注意的网络层是nn.ReflectionPad2d和nn.InstanceNorm2d,前者搭配7x7卷积,先在特征图周围以反射的方式补长度,使得卷积后特征图尺寸不变,示例如下,输出结果就是以特征图边界为反射边,向外补充
nn.InstanceNorm2d是相比于batchNorm更加适合图像生成,风格迁移的归一化方法,相比于batchNorm跨样本,单通道统计,InstanceNorm采用单样本,单通道统计,括号中的参数代表通道数。
判别器部分:结构比生成器更加简单,经过5层卷积,通道数缩减为1,最后池化平均,尺寸也缩减为1x1,最最后reshape一下,变为(batchsize,1)
class Discriminator(nn.Module): def __init__(self, input_nc): super(Discriminator, self).__init__() # A bunch of convolutions one after another model = [ nn.Conv2d(input_nc, 64, 4, stride=2, padding=1), nn.LeakyReLU(0.2, inplace=True) ] model += [ nn.Conv2d(64, 128, 4, stride=2, padding=1), nn.InstanceNorm2d(128), nn.LeakyReLU(0.2, inplace=True) ] model += [ nn.Conv2d(128, 256, 4, stride=2, padding=1), nn.InstanceNorm2d(256), nn.LeakyReLU(0.2, inplace=True) ] model += [ nn.Conv2d(256, 512, 4, padding=1), nn.InstanceNorm2d(512), nn.LeakyReLU(0.2, inplace=True) ] # FCN classification layer model += [nn.Conv2d(512, 1, 4, padding=1)] self.model = nn.Sequential(*model) def forward(self, x): x = self.model(x) # Average pooling and flatten return F.avg_pool2d(x, x.size()[2:]).view(x.size()[0])