|
主要分为四步:
|
一、代码修改:
1、未定义标识符cvCanny,加头文件: #include <opencv2/opencv.hpp>。
2、构造高斯混合模型时有问题,未定义标识符createBackgroundSubtractorMOG2。
// Ptr<BackgroundSubtractor> pBgmodel = createBackgroundSubtractorMOG2().dynamicCast<BackgroundSubtractor>(); Ptr<BackgroundSubtractorMOG2> pBgmodel = createBackgroundSubtractorMOG2(); pBgmodel->setVarThreshold(50);
| Opencv集成了BackgroundSubtractorMOG2用于动态目标检测,用到的是基于自适应混合高斯背景建模的背景减除法,相对于BackgroundSubtractorMOG,其具有更好的抗干扰能力,特别是光照变化。 |
问题没解决,把整个void find_move_people()函数删了。
3、sqrt和pow函数重载有问题,把rgb分量修改为double类型。
double img_r, img_g, img_b;
// 计算theta角 float numerator = (img_r - img_g + img_r - img_b) / 2; float denominator = sqrt( (img_r - img_g)*(img_r - img_g) + (img_r - img_b)*(img_g - img_b));
4、修改源文件路径:"data//3.jpg";

5、测试

二、代码记录:
代码(原):


#include <opencv2/core/core.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/imgproc/imgproc.hpp> #include <opencv2/video/background_segm.hpp> #include <iostream> #include <math.h> using namespace cv; using namespace std; void find_move_people(); IplImage *srcImage, *cannyImage; char *grayWindow, *cannyWindow; void canny(); void changeSImage(Mat &image, IplImage &outImg, float sRadio); IplImage* catHSImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I); IplImage* HSI2RGBImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I); void pasteEdge(Mat &image, Mat &outImg, IplImage cannyImage); void on_trackbar(int threshold) { // 灰度图,canny输出图,低阈值,高阈值,灰度梯度的算子内核大小 cvCanny(srcImage, cannyImage, threshold, threshold * 3, 3); cvShowImage(cannyWindow, cannyImage); } int main(void) { char *img = "data//3.jpg"; Mat image = imread(img); //canny边缘检测 srcImage = cvLoadImage(img, CV_LOAD_IMAGE_GRAYSCALE); cannyImage = cvCreateImage(cvGetSize(srcImage), IPL_DEPTH_8U, 1); int threshold = 70; cvCanny(srcImage, cannyImage, threshold, threshold * 3, 3); cvShowImage("边缘", cannyImage); Mat pasteEdgeMat; pasteEdge(image, pasteEdgeMat, *cannyImage); // 显示将边缘贴在原图上 imshow("canny贴图", pasteEdgeMat); // 双边滤波 Mat binateMat; bilateralFilter(pasteEdgeMat, binateMat, 10, 50, 50, BORDER_DEFAULT); //不贴边缘直接双边滤波 //bilateralFilter(image, binateMat, 10, 50, 50, BORDER_DEFAULT); imshow("原图", image); imshow("双边滤波", binateMat); //增强图像的颜色饱和度 IplImage outImg; changeSImage(binateMat, outImg, 5); cvShowImage("hsi2", &outImg); waitKey(0); } // 将边缘检测后的图 cannyImage 边以黑色的形式贴在 image上。 void pasteEdge(Mat &image, Mat &outImg, IplImage cannyImage) { Mat cannyMat; cannyMat = cvarrToMat(&cannyImage); //颜色反转 cannyMat = cannyMat < 100; image.copyTo(outImg, cannyMat); } // 将image 像素转化到 HSI 空间,并调整S 即颜色的饱和度, void changeSImage(Mat &image, IplImage &outImg, float sRadio) { int rows = image.rows; int cols = image.cols; // 三个HSI空间数据矩阵 CvMat* HSI_H = cvCreateMat(rows, cols, CV_32FC1); CvMat* HSI_S = cvCreateMat(rows, cols, CV_32FC1); CvMat* HSI_I = cvCreateMat(rows, cols, CV_32FC1); // 原始图像数据指针, HSI矩阵数据指针 uchar* data; // rgb分量 int img_r, img_g, img_b; int min_rgb; // rgb分量中的最小值 // HSI分量 float fHue, fSaturation, fIntensity; int channels = image.channels(); for (int i = 0; i < rows; i++) { for (int j = 0; j < cols; j++) { data = image.ptr<uchar>(i); data = data + j*channels; img_b = *data; data++; img_g = *data; data++; img_r = *data; // Intensity分量[0, 1] fIntensity = (float)((img_b + img_g + img_r) / 3) / 255; // 得到RGB分量中的最小值 float fTemp = img_r < img_g ? img_r : img_g; min_rgb = fTemp < img_b ? fTemp : img_b; // Saturation分量[0, 1] fSaturation = 1 - (float)(3 * min_rgb) / (img_r + img_g + img_b); // 计算theta角 float numerator = (img_r - img_g + img_r - img_b) / 2; float denominator = sqrt( pow((img_r - img_g), 2) + (img_r - img_b)*(img_g - img_b)); // 计算Hue分量 if (denominator != 0) { float theta = acos(numerator / denominator) * 180 / 3.14; if (img_b <= img_g) { fHue = theta; } else { fHue = 360 - theta; } } else { fHue = 0; } // 赋值 cvmSet(HSI_H, i, j, fHue); cvmSet(HSI_S, i, j, fSaturation * sRadio); cvmSet(HSI_I, i, j, fIntensity); } } outImg = *HSI2RGBImage(HSI_H, HSI_S, HSI_I); //IplImage* ip2 = HSI2RGBImage(&hsi[0], &hsi[1], &hsi[2]); } IplImage* catHSImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I) { IplImage* HSI_Image = cvCreateImage(cvGetSize(HSI_H), IPL_DEPTH_8U, 3); for (int i = 0; i < HSI_Image->height; i++) { for (int j = 0; j < HSI_Image->width; j++) { double d = cvmGet(HSI_H, i, j); int b = (int)(d * 255 / 360); d = cvmGet(HSI_S, i, j); int g = (int)(d * 255); d = cvmGet(HSI_I, i, j); int r = (int)(d * 255); cvSet2D(HSI_Image, i, j, cvScalar(b, g, r)); } } return HSI_Image; } IplImage* HSI2RGBImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I) { IplImage * RGB_Image = cvCreateImage(cvGetSize(HSI_H), IPL_DEPTH_8U, 3); int iB, iG, iR; for (int i = 0; i < RGB_Image->height; i++) { for (int j = 0; j < RGB_Image->width; j++) { // 该点的色度H double dH = cvmGet(HSI_H, i, j); // 该点的色饱和度S double dS = cvmGet(HSI_S, i, j); // 该点的亮度 double dI = cvmGet(HSI_I, i, j); double dTempB, dTempG, dTempR; // RG扇区 if (dH < 120 && dH >= 0) { // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempB = dI * (1 - dS); dTempR = dI * (1 + (dS * cos(dH)) / cos(3.1415926 / 3 - dH)); dTempG = (3 * dI - (dTempR + dTempB)); } // GB扇区 else if (dH < 240 && dH >= 120) { dH -= 120; // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempR = dI * (1 - dS); dTempG = dI * (1 + dS * cos(dH) / cos(3.1415926 / 3 - dH)); dTempB = (3 * dI - (dTempR + dTempG)); } // BR扇区 else { dH -= 240; // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempG = dI * (1 - dS); dTempB = dI * (1 + (dS * cos(dH)) / cos(3.1415926 / 3 - dH)); dTempR = (3 * dI - (dTempG + dTempB)); } iB = dTempB * 255; iG = dTempG * 255; iR = dTempR * 255; cvSet2D(RGB_Image, i, j, cvScalar(iB, iG, iR)); } } return RGB_Image; } void find_move_people() { char *video_path = "E:\opencv\opencv\sources\samples\data\vtest.avi"; VideoCapture capture; Mat frame, image, foreGround, backGround, fgMask; // Ptr<BackgroundSubtractor> pBgmodel = createBackgroundSubtractorMOG2().dynamicCast<BackgroundSubtractor>(); Ptr<BackgroundSubtractorMOG2> pBgmodel = createBackgroundSubtractorMOG2(); pBgmodel->setVarThreshold(50); capture.open(video_path); if (!capture.isOpened()) { cout << "open videp eror!" << endl; } while (true) { //source是原始帧 capture >> frame; if (frame.empty()) break; //缩小为原来四分之一,加快处理速度 resize(frame, image, Size(frame.cols / 2, frame.rows / 2), INTER_LINEAR); if (foreGround.empty()) foreGround.create(image.size(), image.type()); //得到前景图像,是黑白灰 3种灰度值的图 pBgmodel->apply(image, fgMask); // 下面是根据前景图的操作,和原图像融合得到有纹理的前景图 GaussianBlur(fgMask, fgMask, Size(5, 5), 0); threshold(fgMask, fgMask, 10, 255, THRESH_BINARY); // 将foreGraound 所有像素置为0 foreGround = Scalar::all(0); //fgMask对应点像素值为255则 foreGround像素为image里的像素,为0则直接为0 image.copyTo(foreGround, fgMask); pBgmodel->getBackgroundImage(backGround); imshow("frame", frame); imshow("backGround", backGround); imshow("foreGround", foreGround); //imshow("fgMask", fgMask); char key = waitKey(100); if (key == 27)//27 对应得assic 码是27 break; } } void canny() { char *f = "E:\opencv\opencv\sources\samples\wp8\OpenCVXaml\OpenCVXaml\Assets\Lena.png"; grayWindow = "原图"; cannyWindow = "边缘检测"; srcImage = cvLoadImage(f, CV_LOAD_IMAGE_GRAYSCALE); cannyImage = cvCreateImage(cvGetSize(srcImage), IPL_DEPTH_8U, 1); cvNamedWindow(grayWindow, CV_WINDOW_AUTOSIZE); cvNamedWindow(cannyWindow, CV_WINDOW_AUTOSIZE); const char *threshold = "Threshold"; int nThresholdEdge = 1; //on_trackbar 为回调函数,既当滑动条动,nThresholdEdge 改变时调用的函数 cvCreateTrackbar(threshold, cannyWindow, &nThresholdEdge, 100, on_trackbar); cvShowImage(grayWindow, srcImage); on_trackbar(1); }
代码(修改后的):
// cartoon2.cpp : 定义控制台应用程序的入口点。 // #include "stdafx.h" #include <opencv2/opencv.hpp> #include <opencv2/highgui/highgui.hpp> #include "opencv2/core/core.hpp" #include "opencv2/imgproc/imgproc.hpp" #include "opencv2/video/background_segm.hpp" #include <iostream> #include <math.h> using namespace cv; using namespace std; //void find_move_people(); IplImage *srcImage, *cannyImage; char *grayWindow, *cannyWindow; void canny(); void changeSImage(Mat &image, IplImage &outImg, float sRadio); IplImage* catHSImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I); IplImage* HSI2RGBImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I); void pasteEdge(Mat &image, Mat &outImg, IplImage cannyImage); void on_trackbar(int threshold) { // 灰度图,canny输出图,低阈值,高阈值,灰度梯度的算子内核大小 cvCanny(srcImage, cannyImage, threshold, threshold * 3, 3); cvShowImage(cannyWindow, cannyImage); } int main(void) { char *img = "data//3.jpg"; Mat image = imread(img); //canny边缘检测 srcImage = cvLoadImage(img, CV_LOAD_IMAGE_GRAYSCALE); cannyImage = cvCreateImage(cvGetSize(srcImage), IPL_DEPTH_8U, 1); int threshold = 70; cvCanny(srcImage, cannyImage, threshold, threshold * 3, 3); cvShowImage("边缘", cannyImage); Mat pasteEdgeMat; pasteEdge(image, pasteEdgeMat, *cannyImage); // 显示将边缘贴在原图上 imshow("canny贴图", pasteEdgeMat); // 双边滤波 Mat binateMat; bilateralFilter(pasteEdgeMat, binateMat, 10, 50, 50, BORDER_DEFAULT); //不贴边缘直接双边滤波 //bilateralFilter(image, binateMat, 10, 50, 50, BORDER_DEFAULT); imshow("原图", image); imshow("双边滤波", binateMat); //增强图像的颜色饱和度 IplImage outImg; changeSImage(binateMat, outImg, 5); cvShowImage("hsi2", &outImg); waitKey(0); } // 将边缘检测后的图 cannyImage 边以黑色的形式贴在 image上。 void pasteEdge(Mat &image, Mat &outImg, IplImage cannyImage) { Mat cannyMat; cannyMat = cvarrToMat(&cannyImage); //颜色反转 cannyMat = cannyMat < 100; image.copyTo(outImg, cannyMat); } // 将image 像素转化到 HSI 空间,并调整S 即颜色的饱和度, void changeSImage(Mat &image, IplImage &outImg, float sRadio) { int rows = image.rows; int cols = image.cols; // 三个HSI空间数据矩阵 CvMat* HSI_H = cvCreateMat(rows, cols, CV_32FC1); CvMat* HSI_S = cvCreateMat(rows, cols, CV_32FC1); CvMat* HSI_I = cvCreateMat(rows, cols, CV_32FC1); // 原始图像数据指针, HSI矩阵数据指针 uchar* data; // rgb分量 double img_r, img_g, img_b; int min_rgb; // rgb分量中的最小值 // HSI分量 float fHue, fSaturation, fIntensity; int channels = image.channels(); for (int i = 0; i < rows; i++) { for (int j = 0; j < cols; j++) { data = image.ptr<uchar>(i); data = data + j*channels; img_b = *data; data++; img_g = *data; data++; img_r = *data; // Intensity分量[0, 1] fIntensity = (float)((img_b + img_g + img_r) / 3) / 255; // 得到RGB分量中的最小值 float fTemp = img_r < img_g ? img_r : img_g; min_rgb = fTemp < img_b ? fTemp : img_b; // Saturation分量[0, 1] fSaturation = 1 - (float)(3 * min_rgb) / (img_r + img_g + img_b); // 计算theta角 float numerator = (img_r - img_g + img_r - img_b) / 2; float denominator = sqrt( (img_r - img_g)*(img_r - img_g) + (img_r - img_b)*(img_g - img_b)); // 计算Hue分量 if (denominator != 0) { float theta = acos(numerator / denominator) * 180 / 3.14; if (img_b <= img_g) { fHue = theta; } else { fHue = 360 - theta; } } else { fHue = 0; } // 赋值 cvmSet(HSI_H, i, j, fHue); cvmSet(HSI_S, i, j, fSaturation * sRadio); cvmSet(HSI_I, i, j, fIntensity); } } outImg = *HSI2RGBImage(HSI_H, HSI_S, HSI_I); //IplImage* ip2 = HSI2RGBImage(&hsi[0], &hsi[1], &hsi[2]); } IplImage* catHSImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I) { IplImage* HSI_Image = cvCreateImage(cvGetSize(HSI_H), IPL_DEPTH_8U, 3); for (int i = 0; i < HSI_Image->height; i++) { for (int j = 0; j < HSI_Image->width; j++) { double d = cvmGet(HSI_H, i, j); int b = (int)(d * 255 / 360); d = cvmGet(HSI_S, i, j); int g = (int)(d * 255); d = cvmGet(HSI_I, i, j); int r = (int)(d * 255); cvSet2D(HSI_Image, i, j, cvScalar(b, g, r)); } } return HSI_Image; } IplImage* HSI2RGBImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I) { IplImage * RGB_Image = cvCreateImage(cvGetSize(HSI_H), IPL_DEPTH_8U, 3); int iB, iG, iR; for (int i = 0; i < RGB_Image->height; i++) { for (int j = 0; j < RGB_Image->width; j++) { // 该点的色度H double dH = cvmGet(HSI_H, i, j); // 该点的色饱和度S double dS = cvmGet(HSI_S, i, j); // 该点的亮度 double dI = cvmGet(HSI_I, i, j); double dTempB, dTempG, dTempR; // RG扇区 if (dH < 120 && dH >= 0) { // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempB = dI * (1 - dS); dTempR = dI * (1 + (dS * cos(dH)) / cos(3.1415926 / 3 - dH)); dTempG = (3 * dI - (dTempR + dTempB)); } // GB扇区 else if (dH < 240 && dH >= 120) { dH -= 120; // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempR = dI * (1 - dS); dTempG = dI * (1 + dS * cos(dH) / cos(3.1415926 / 3 - dH)); dTempB = (3 * dI - (dTempR + dTempG)); } // BR扇区 else { dH -= 240; // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempG = dI * (1 - dS); dTempB = dI * (1 + (dS * cos(dH)) / cos(3.1415926 / 3 - dH)); dTempR = (3 * dI - (dTempG + dTempB)); } iB = dTempB * 255; iG = dTempG * 255; iR = dTempR * 255; cvSet2D(RGB_Image, i, j, cvScalar(iB, iG, iR)); } } return RGB_Image; } void canny() { char *f = "data//3.jpg"; grayWindow = "原图"; cannyWindow = "边缘检测"; srcImage = cvLoadImage(f, CV_LOAD_IMAGE_GRAYSCALE); cannyImage = cvCreateImage(cvGetSize(srcImage), IPL_DEPTH_8U, 1); cvNamedWindow(grayWindow, CV_WINDOW_AUTOSIZE); cvNamedWindow(cannyWindow, CV_WINDOW_AUTOSIZE); const char *threshold = "Threshold"; int nThresholdEdge = 1; //on_trackbar 为回调函数,既当滑动条动,nThresholdEdge 改变时调用的函数 cvCreateTrackbar(threshold, cannyWindow, &nThresholdEdge, 100, on_trackbar); cvShowImage(grayWindow, srcImage); on_trackbar(1); }
取消边缘增强。

代码(去掉canny黑贴边):
// cartoon2.cpp : 定义控制台应用程序的入口点。 // #include "stdafx.h" #include <opencv2/opencv.hpp> #include <opencv2/highgui/highgui.hpp> #include "opencv2/core/core.hpp" #include "opencv2/imgproc/imgproc.hpp" #include "opencv2/video/background_segm.hpp" #include <iostream> #include <math.h> using namespace cv; using namespace std; //void find_move_people(); IplImage *srcImage, *cannyImage; char *grayWindow, *cannyWindow; void canny(); void changeSImage(Mat &image, IplImage &outImg, float sRadio); IplImage* catHSImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I); IplImage* HSI2RGBImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I); int main(void) { char *img = "data//3.jpg"; Mat image = imread(img); //canny边缘检测 srcImage = cvLoadImage(img, CV_LOAD_IMAGE_GRAYSCALE); Mat binateMat; //不贴边缘直接双边滤波 bilateralFilter(image, binateMat, 10, 50, 50, BORDER_DEFAULT); imshow("原图", image); //增强图像的颜色饱和度 IplImage outImg; changeSImage(binateMat, outImg, 5); cvShowImage("hsi2", &outImg); waitKey(0); } // 将image 像素转化到 HSI 空间,并调整S 即颜色的饱和度, void changeSImage(Mat &image, IplImage &outImg, float sRadio) { int rows = image.rows; int cols = image.cols; // 三个HSI空间数据矩阵 CvMat* HSI_H = cvCreateMat(rows, cols, CV_32FC1); CvMat* HSI_S = cvCreateMat(rows, cols, CV_32FC1); CvMat* HSI_I = cvCreateMat(rows, cols, CV_32FC1); // 原始图像数据指针, HSI矩阵数据指针 uchar* data; // rgb分量 double img_r, img_g, img_b; int min_rgb; // rgb分量中的最小值 // HSI分量 float fHue, fSaturation, fIntensity; int channels = image.channels(); for (int i = 0; i < rows; i++) { for (int j = 0; j < cols; j++) { data = image.ptr<uchar>(i); data = data + j*channels; img_b = *data; data++; img_g = *data; data++; img_r = *data; // Intensity分量[0, 1] fIntensity = (float)((img_b + img_g + img_r) / 3) / 255; // 得到RGB分量中的最小值 float fTemp = img_r < img_g ? img_r : img_g; min_rgb = fTemp < img_b ? fTemp : img_b; // Saturation分量[0, 1] fSaturation = 1 - (float)(3 * min_rgb) / (img_r + img_g + img_b); // 计算theta角 float numerator = (img_r - img_g + img_r - img_b) / 2; float denominator = sqrt( (img_r - img_g)*(img_r - img_g) + (img_r - img_b)*(img_g - img_b)); // 计算Hue分量 if (denominator != 0) { float theta = acos(numerator / denominator) * 180 / 3.14; if (img_b <= img_g) { fHue = theta; } else { fHue = 360 - theta; } } else { fHue = 0; } // 赋值 cvmSet(HSI_H, i, j, fHue); cvmSet(HSI_S, i, j, fSaturation * sRadio); cvmSet(HSI_I, i, j, fIntensity); } } outImg = *HSI2RGBImage(HSI_H, HSI_S, HSI_I); //IplImage* ip2 = HSI2RGBImage(&hsi[0], &hsi[1], &hsi[2]); } IplImage* catHSImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I) { IplImage* HSI_Image = cvCreateImage(cvGetSize(HSI_H), IPL_DEPTH_8U, 3); for (int i = 0; i < HSI_Image->height; i++) { for (int j = 0; j < HSI_Image->width; j++) { double d = cvmGet(HSI_H, i, j); int b = (int)(d * 255 / 360); d = cvmGet(HSI_S, i, j); int g = (int)(d * 255); d = cvmGet(HSI_I, i, j); int r = (int)(d * 255); cvSet2D(HSI_Image, i, j, cvScalar(b, g, r)); } } return HSI_Image; } IplImage* HSI2RGBImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I) { IplImage * RGB_Image = cvCreateImage(cvGetSize(HSI_H), IPL_DEPTH_8U, 3); int iB, iG, iR; for (int i = 0; i < RGB_Image->height; i++) { for (int j = 0; j < RGB_Image->width; j++) { // 该点的色度H double dH = cvmGet(HSI_H, i, j); // 该点的色饱和度S double dS = cvmGet(HSI_S, i, j); // 该点的亮度 double dI = cvmGet(HSI_I, i, j); double dTempB, dTempG, dTempR; // RG扇区 if (dH < 120 && dH >= 0) { // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempB = dI * (1 - dS); dTempR = dI * (1 + (dS * cos(dH)) / cos(3.1415926 / 3 - dH)); dTempG = (3 * dI - (dTempR + dTempB)); } // GB扇区 else if (dH < 240 && dH >= 120) { dH -= 120; // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempR = dI * (1 - dS); dTempG = dI * (1 + dS * cos(dH) / cos(3.1415926 / 3 - dH)); dTempB = (3 * dI - (dTempR + dTempG)); } // BR扇区 else { dH -= 240; // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempG = dI * (1 - dS); dTempB = dI * (1 + (dS * cos(dH)) / cos(3.1415926 / 3 - dH)); dTempR = (3 * dI - (dTempG + dTempB)); } iB = dTempB * 255; iG = dTempG * 255; iR = dTempR * 255; cvSet2D(RGB_Image, i, j, cvScalar(iB, iG, iR)); } } return RGB_Image; }
最后:
// cartoon2.cpp : 定义控制台应用程序的入口点。 // #include "stdafx.h" #include <opencv2/opencv.hpp> #include <opencv2/highgui/highgui.hpp> #include "opencv2/core/core.hpp" #include "opencv2/imgproc/imgproc.hpp" #include "opencv2/video/background_segm.hpp" #include <iostream> #include <math.h> using namespace cv; using namespace std; //void find_move_people(); IplImage *srcImage, *cannyImage; char *grayWindow, *cannyWindow; void canny(); void changeSImage(Mat &image, IplImage &outImg, float sRadio); IplImage* catHSImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I); IplImage* HSI2RGBImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I); int main(void) { char *img = "data//5.png"; Mat image = imread(img); //canny边缘检测 srcImage = cvLoadImage(img, CV_LOAD_IMAGE_GRAYSCALE); Mat binateMat; //不贴边缘直接双边滤波 bilateralFilter(image, binateMat, 10, 50, 50, BORDER_DEFAULT); imshow("原图", image); //增强图像的颜色饱和度 IplImage outImg; changeSImage(binateMat, outImg, 1.5); cvShowImage("hsi2", &outImg); cvSaveImage("save1_5.jpg",&outImg); waitKey(0); } // 将image 像素转化到 HSI 空间,并调整S 即颜色的饱和度, void changeSImage(Mat &image, IplImage &outImg, float sRadio) { int rows = image.rows; int cols = image.cols; // 三个HSI空间数据矩阵 CvMat* HSI_H = cvCreateMat(rows, cols, CV_32FC1); CvMat* HSI_S = cvCreateMat(rows, cols, CV_32FC1); CvMat* HSI_I = cvCreateMat(rows, cols, CV_32FC1); // 原始图像数据指针, HSI矩阵数据指针 uchar* data; // rgb分量 double img_r, img_g, img_b; int min_rgb; // rgb分量中的最小值 // HSI分量 float fHue, fSaturation, fIntensity; int channels = image.channels(); for (int i = 0; i < rows; i++) { for (int j = 0; j < cols; j++) { data = image.ptr<uchar>(i); data = data + j*channels; img_b = *data; data++; img_g = *data; data++; img_r = *data; // Intensity分量[0, 1] fIntensity = (float)((img_b + img_g + img_r) / 3) / 255; // 得到RGB分量中的最小值 float fTemp = img_r < img_g ? img_r : img_g; min_rgb = fTemp < img_b ? fTemp : img_b; // Saturation分量[0, 1] fSaturation = 1 - (float)(3 * min_rgb) / (img_r + img_g + img_b); // 计算theta角 float numerator = (img_r - img_g + img_r - img_b) / 2; float denominator = sqrt( (img_r - img_g)*(img_r - img_g) + (img_r - img_b)*(img_g - img_b)); // 计算Hue分量 if (denominator != 0) { float theta = acos(numerator / denominator) * 180 / 3.14; if (img_b <= img_g) { fHue = theta; } else { fHue = 360 - theta; } } else { fHue = 0; } // 赋值 cvmSet(HSI_H, i, j, fHue); cvmSet(HSI_S, i, j, fSaturation * sRadio); cvmSet(HSI_I, i, j, fIntensity); } } outImg = *HSI2RGBImage(HSI_H, HSI_S, HSI_I); //IplImage* ip2 = HSI2RGBImage(&hsi[0], &hsi[1], &hsi[2]); } IplImage* catHSImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I) { IplImage* HSI_Image = cvCreateImage(cvGetSize(HSI_H), IPL_DEPTH_8U, 3); for (int i = 0; i < HSI_Image->height; i++) { for (int j = 0; j < HSI_Image->width; j++) { double d = cvmGet(HSI_H, i, j); int b = (int)(d * 255 / 360); d = cvmGet(HSI_S, i, j); int g = (int)(d * 255); d = cvmGet(HSI_I, i, j); int r = (int)(d * 255); cvSet2D(HSI_Image, i, j, cvScalar(b, g, r)); } } return HSI_Image; } IplImage* HSI2RGBImage(CvMat* HSI_H, CvMat* HSI_S, CvMat* HSI_I) { IplImage * RGB_Image = cvCreateImage(cvGetSize(HSI_H), IPL_DEPTH_8U, 3); int iB, iG, iR; for (int i = 0; i < RGB_Image->height; i++) { for (int j = 0; j < RGB_Image->width; j++) { // 该点的色度H double dH = cvmGet(HSI_H, i, j); // 该点的色饱和度S double dS = cvmGet(HSI_S, i, j); // 该点的亮度 double dI = cvmGet(HSI_I, i, j); double dTempB, dTempG, dTempR; // RG扇区 if (dH < 120 && dH >= 0) { // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempB = dI * (1 - dS); dTempR = dI * (1 + (dS * cos(dH)) / cos(3.1415926 / 3 - dH)); dTempG = (3 * dI - (dTempR + dTempB)); } // GB扇区 else if (dH < 240 && dH >= 120) { dH -= 120; // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempR = dI * (1 - dS); dTempG = dI * (1 + dS * cos(dH) / cos(3.1415926 / 3 - dH)); dTempB = (3 * dI - (dTempR + dTempG)); } // BR扇区 else { dH -= 240; // 将H转为弧度表示 dH = dH * 3.1415926 / 180; dTempG = dI * (1 - dS); dTempB = dI * (1 + (dS * cos(dH)) / cos(3.1415926 / 3 - dH)); dTempR = (3 * dI - (dTempG + dTempB)); } iB = dTempB * 255; iG = dTempG * 255; iR = dTempR * 255; cvSet2D(RGB_Image, i, j, cvScalar(iB, iG, iR)); } } return RGB_Image; }
保存IplImage图用,cvSaveImage。
Opencv 图像读取与保存问题 - cxchanpin - 博客园 https://www.cnblogs.com/cxchanpin/p/7253722.html
// c++: Mat based bool imwrite(const string& filename, InputArray img, const vector<int>& params=vector<int>() ); // C: CvMat and IplImage based int cvSaveImage(const char* filename, const CvArr* image, const int* params=0 );
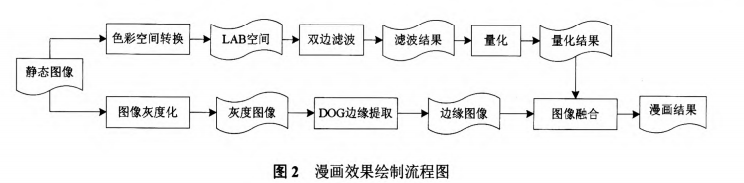
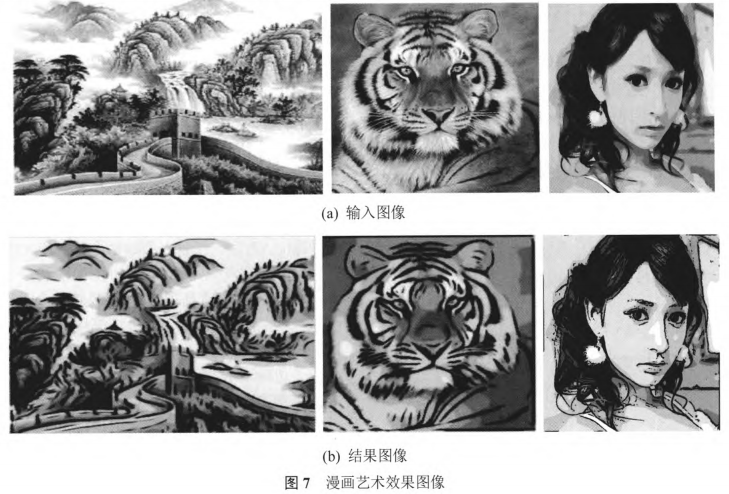
三、非真实感绘制漫画艺术效果的研究与实现-文献学习2016

【转载自】
GitHub - hurtnotbad/cartoon: opencv3.2 照片动漫化 https://github.com/hurtnotbad/cartoon
opencv 照片动漫风格_Lammy的专栏-CSDN博客 https://blog.csdn.net/zhangpengzp/article/details/77149199
代码下载地址:https://github.com/hurtnotbad/cartoon/archive/master.zip
【其他】
OpenCV: cv::BackgroundSubtractorMOG2 Class Reference https://docs.opencv.org/3.2.0/d7/d7b/classcv_1_1BackgroundSubtractorMOG2.html