① I2C(Inter-Integrated Circuit)总线是由飞利浦公司开发的两线式串行总线,用于连接微控制器及其外围设备

② I2C总线有两根双向信号线
(1)SDA:Serial Data Line(数据线)
(2)SCL:Serial CLock Line(时钟线)
③ I2C总线寻址
(1)I2C总线协议规定,从设备采用7位的地址。
* D7~D0:从设备地址
* D0位:数据的传送方向。“0”表示主设备向从设备写数据;“1”表示主设备由从设备读数据
注:主设备发送地址时,总线上的每个从设备都将这7位地址与自己的地址进行比较,如果相同,则认为是自己正被主设备寻址,根据R/W位将自己确定为发送器或者接收器
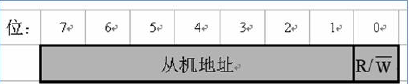
(2)从设备的地址由固定部分和用户自定义部分组成。
* 固定部分:D7-D4 共4位。这是由从设备的生产厂商生产时就已确定的值。
* 用户自定义部分:D3-D1 共3位。这3位通常对应设备的3个引脚(A0~A2)。把3个引脚接到不同的电平上,就可以形成一个3位的数值。
④ I2C总线时序
(1)空闲状态:I2C总线总线的SDA和SCL两条信号线同时处于高电平时,规定为总线的空闲状态。
(2)起始状态:在时钟线SCL保持高电平期间,数据线SDA上的电平被拉低(即负跳变),定义为I2C总线总线的启动信号,它标志着一次数据传输的开始
(3)结束状态:在时钟线SCL保持高电平时,数据线SDA被释放,使得SDA返回高电平(即正跳变),称为I2C总线的停止信号
(4)数据传送:I2C总线上的所有数据(地址和数据)都是以8位一个字节为单位传送的
(5)应答位:发送器每发送一个字节,就在时钟脉冲第9位释放数据线,由接收器反馈一个应答信号。应答信号为低电平时,定为有效应答位ACK,表示接收器已经成功地接收了该字节;应答信号为高电平时,定为非应答位(NACK),表示接收器没有成功接收该字节
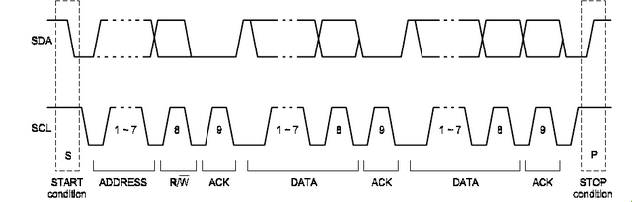
注:I2C接口会在SCL为高电平期间对SDA状态进行采样,所以SDA高低位的变换应该在SCL是低电平期间完成。所以SDA的高电平脉冲要要比SCL略宽。
⑤ 基于S3C2440的I2C裸机代码:
#include "GlobalDefine.h" #include "Error.h" #include "Common.h" #include "I2c.h" #include "ModManager.h" #include "../Protocol/inc/I2cProtocol.h" #define INTPND (*(volatile unsigned long*)0x4a000010) #define SRCPND (*(volatile unsigned long*)0x4a000000) #define INTMSK (*(volatile unsigned long*)0x4a000008) #define GPECON (*(volatile unsigned long*)0x56000040) #define GPEUP (*(volatile unsigned long*)0x56000048) #define IICCON (*(volatile unsigned char*)0x54000000) #define IICSTAT (*(volatile unsigned char*)0x54000004) #define IICDS (*(volatile unsigned char*)0x5400000C) #define SLAVE_WRITE_ADDR 0xa0 #define SLAVE_READ_ADDR 0xa1 static void I2cDelay(int i) { int j = 0; while (i--) { for (j = 0; j < 100; j++) { ; } } } static void I2cInit() { //1 Interrupt Initialize INTPND |= (1 << 27); SRCPND |= (1 << 27); INTMSK &= ~(1 << 27); IICCON |= (1 << 5); //2 Set I2C-Bus transmit clock IICCON &= ~(1 << 6); IICCON &= ~(0xf << 0); IICCON |= (0x5 << 0); //3. Set IIC-bus data output enable IICSTAT |= (1 << 4); //4. Set GPIO pin function GPECON |= (0x2 << 28)|(0x2 << 30); GPEUP |= (0x3 << 14); //5. Set IIC-bus acknowledge enable IICCON |= (1 << 7); } static void I2cWriteByte(unsigned char data, unsigned char addr) { //1. Set to Master-Transmit mode IICSTAT |= (3 << 6); //2. Write slave device address IICDS = SLAVE_WRITE_ADDR; IICCON &= ~(1 << 4); //3. Write 0xF0 to IICSTAT.(Generate START signal) IICSTAT = 0xF0; // Wait Ack while ((IICCON & (1 << 4)) == 0 ) I2cDelay(100); //4. Write address in chip to IICDS IICDS = addr; IICCON &= ~(1 << 4); // Wait Ack while ((IICCON & (1 << 4)) == 0 ) I2cDelay(100); //5. Write data to IICDS IICDS = data; IICCON &= ~(1 << 4); // Wait Ack while ((IICCON & (1 << 4)) == 0 ) I2cDelay(100); //6. Write 0xD0 to IICSTAT(Generate STOP signal) IICSTAT = 0xD0; //7. Clear Interrupt IICCON &= ~(1 << 4); I2cDelay(100); } static void I2cReadBytes(unsigned char addr, int length, unsigned char *buf) { int j = 0; unsigned char unusedata; //1. Set to Master-Transmit mode IICSTAT |= (3 << 6); //2. Write slave device write address IICDS = SLAVE_WRITE_ADDR; IICCON &= ~(1 << 4); //3. Write 0xF0 to IICSTAT IICSTAT = 0xF0; //Wait ACK while ((IICCON & (1 << 4)) == 0 ) I2cDelay(100); //4. Write address in the eeprom IICDS = addr; IICCON &= ~(1 << 4); // Wait ACK while ((IICCON & (1 << 4)) == 0 ) I2cDelay(100); //5. Set to Master-Receive mode IICSTAT &= ~(3 << 6); IICSTAT |= (2 << 6); //6. Write slave device read address IICDS = SLAVE_READ_ADDR; IICCON &= ~(1 << 4); //7. Write 0xB0 to IICSTAT for starting to receive IICSTAT = 0xb0; while ((IICCON & (1 << 4)) == 0 ) I2cDelay(100); //8. Write address in chip IICDS = addr; IICCON &= ~(1 << 4); while((IICCON & (1 << 4)) == 0) { I2cDelay(100); } for(j = 0; j < length; j++) { if(j == (length - 1)) { IICCON &= ~(1 << 7); } buf[j] = IICDS; // Clear Interrupt IICCON &= ~(1 << 4); // Wait for Interrupt while ((IICCON & (1 << 4)) == 0 ) I2cDelay(100); } //9. Write 0x90 to IICSTAT(Generate STOP signal) IICSTAT = 0x90; //10. Clear Interrupt IICCON &= ~(1 << 4); } I2cModeOps i2cModeOps = { .I2cInit = I2cInit, .I2cWriteByte = I2cWriteByte, .I2cReadBytes = I2cReadBytes, }; MODULE_INSTALL(I2c, MOD_I2C, 0, &i2cModeOps);