Mobileye独创性创新
尽管存在相似之处,但Nvidia的SFF无法与Mobileye的RSS相匹配,后者是领先的AV安全模型
迈向无人驾驶的未来,Mobileye继续以新的创新引领行业,不仅将使全自动驾驶汽车(AVs)成为可能,而且还将使人类驾驶的汽车比以往任何时候都更安全。多年来,取得了许多行业首创:2007年实现了摄像头和雷达融合,2010年实现了行人检测警告,2011年实现了仅摄像头向前碰撞警告,2013年实现了纯摄像头自动巡航控制,2015年的免提协助,2016年的众包高清映射,2017年的责任敏感安全(RSS)安全模型,通过使用RSS的新型预防系统实现的“零视觉”视野。
有人说,模仿是最恭维的奉承形式,创新并没有因许多拥护所倡导的相同概念而受到关注。尤其是一位行业参与者习惯性地跟随,就其最新模仿情况继续保持记录。

Innovation Requires Originality
Despite Uncanny Similarities, Nvidia’s SFF Fails to Match Mobileye’s RSS, which is the Leading AV Safety Model
As we march towards a driverless future, we at Mobileye have continued to lead the industry with new innovations that will not only enable fully autonomous vehicles (AVs), but will also make human-driven cars safer than they have ever been. Over the years, I am proud that we have achieved many industry firsts: camera and radar fusion in 2007, pedestrian-detection warning in 2010, camera-only forward-collision warning in 2011, camera-only automatic cruise control (ACC) in 2013, hands-free assist in 2015, crowd-sourced HD-mapping in 2016, the Responsibility-Sensitive Safety (RSS) safety model in 2017 and, most recently, a “vision zero” horizon through a novel preventive system using RSS.
It is said that imitation is the sincerest form of flattery, and our innovations have not gone unnoticed with many embracing the same concepts that we pioneered. One industry player in particular habitually follows our lead and today I would like to set the record straight on its latest imitation.
Let us consider the recent past. After Mobileye announced the world’s first crowdsourced mapping technology – Road Experience Management™ (REM) – in 2016, Nvidia announced a solution the following year that claimed to do the same. When Mobileye coined and introduced L2+ in 2017 as a new category of driving automation that uniquely applied our REM technology to driver assistance systems, again Nvidia followed suit and announced its L2+ offering in 2019.
Our most recent innovation, RSS, was published in an academic paper in 2017. We openly shared all the technical details and mathematics behind RSS because we believe that the safety of automated vehicles should not be proprietary, and that the industry should collaborate with governments on what it means for an AV to drive safely.
The response to and support of RSS has been tremendous. Baidu and Valeo have publicly signed on. China ITS has approved a work group tasked with standardizing RSS for the China market. And we have engaged with governments and standards organizations around the world on RSS. What’s more, dozens of research papers have cited RSS, contributing to the public discourse on this important topic.
考虑一下最近的过去。在Mobileye于2016年宣布全球首个众包地图技术– Road Experience Management™(REM)之后,Nvidia在第二年宣布了一项解决方案,声称也是如此。当Mobileye在2017年创造并推出L2 +作为一种新的驾驶自动化类别,并将REM技术独特地应用于驾驶员辅助系统时,英伟达再次效仿并于2019年宣布了其L2 +产品。
最新的创新RSS于2017年 发表在一篇学术论文中。公开分享RSS背后的所有技术细节和数学信息,因为认为自动驾驶汽车的安全性不应专有,并且该行业应与政府合作,确保AV的安全驾驶。
对RSS的响应和支持是巨大的。 百度和 法雷奥 已经公开签约。中国ITS已批准了一个工作小组,负责为中国市场标准化RSS。已经与世界各地的政府和标准组织就RSS开展了合作。数十篇研究论文引用了RSS,为有关这一重要主题的公众讨论做出了贡献。
一直说,相信RSS是自动车辆决策可验证的安全保证的绝佳起点。已公开邀请整个行业就如何改进RSS提出想法。英伟达(Nvidia)留意了这个电话,并于2018年就影音安全方面的合作联系时,感到很高兴。当英伟达退出提议的合作伙伴关系时,感到困惑。
We’ve always said that we believe RSS is an excellent starting point for verifiable safety assurance of automated vehicle decision-making. We’ve openly invited the entire industry to contribute their ideas on how to improve RSS. We were pleased when Nvidia heeded this call and reached out to us in 2018 about a collaboration on AV Safety. We were puzzled when Nvidia backed out of the proposed partnership.
Imagine our surprise last week when Jensen Huang, CEO of Nvidia, announced a “first-of-its-kind” safety model for AVs. Curious to see what “first-of-its-kind” innovation Nvidia had created, we eagerly read the publicly released white paper about Safety Force Field (SFF), only to have the eerie feeling that we were looking in the mirror.
If imitation is the sincerest form of flattery, then Nvidia must think very highly of us. Based on the information that has been made available, it is clear Nvidia’s leaders have continued their pattern of imitation as their so-called “first-of-its-kind” safety concept is a close replica of the RSS model we published nearly two years ago. In our opinion, SFF is simply an inferior version of RSS dressed in green and black. To the extent there is any innovation there, it appears to be primarily of the linguistic variety.
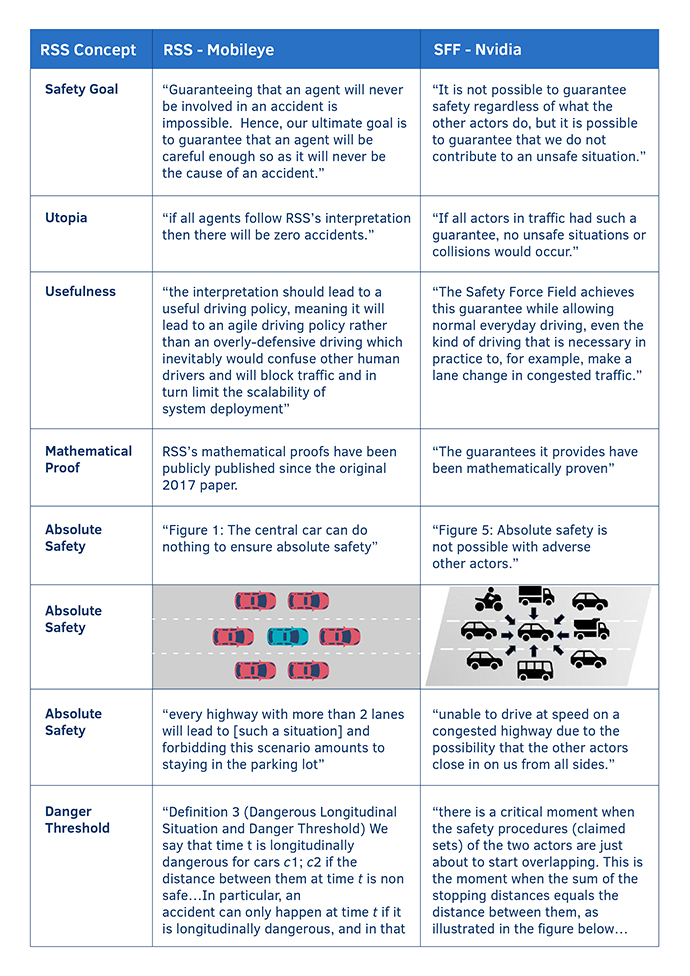
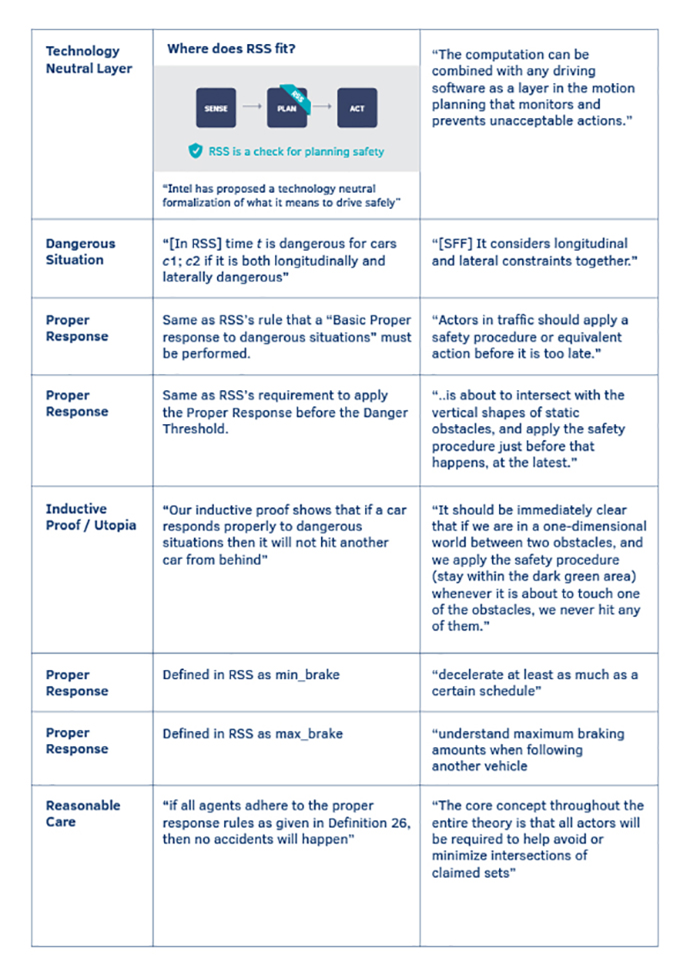
To illustrate Nvidia’s latest attempt to emulate Mobileye’s technology leadership, let me first describe RSS using the technical terms (in Italics) that are defined in our publicly published materials.
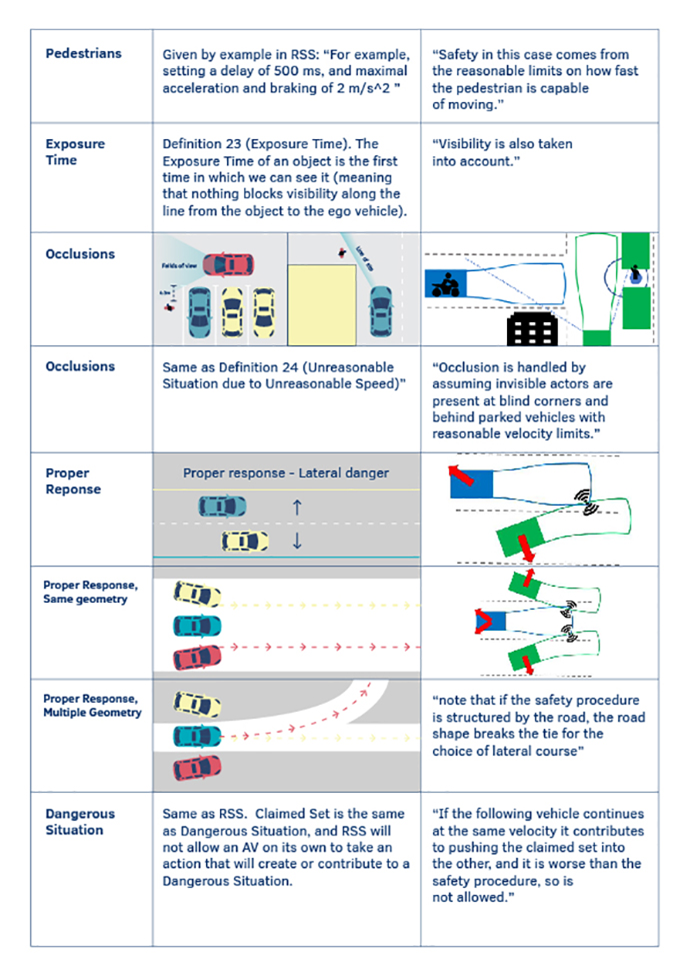
RSS defines a safe longitudinal and a safe lateral distance around the vehicle. When those safe distances are compromised, we say that the vehicle is in a Dangerous Situation and must perform a Proper Response. The specific moment when the vehicle must perform the Proper Response is called the Danger Threshold.
SFF defines identical concepts with slightly modified terminology. Safe longitudinal distance is instead called “the SFF in One Dimension;” safe lateral distance is described as “the SFF in Higher Dimensions.” Instead of Proper Response, SFF uses “Safety Procedure.” Instead of Dangerous Situation, SFF replaces it with “Unsafe Situation.” And, just to be complete, SFF also recognizes the existence of a Danger Threshold, instead calling it a “Critical Moment.”
英伟达首席执行官黄仁勋(Jensen Huang)宣布了AV的“首创”安全模型时,想象一下惊讶。好奇地看到Nvidia创造了“同类首创”的创新,热切地阅读有关安全部队领域(SFF)的公开发布的白皮书,只是感到在镜子里看起来很怪异。
如果模仿是最真诚的奉承形式,那么Nvidia必须高度评价。根据现有的信息,很明显,英伟达的领导者们一直在模仿,所谓的“首创”安全概念是我们近两年发布的RSS模型的近似复制品。SFF只是绿色和黑色的RSS的劣等版本。在某种程度上,哪里有任何创新,似乎主要是语言上的变化。
为了说明Nvidia在模仿Mobileye技术领先方面的最新尝试,首先使用公开发布的材料中定义的技术术语(用斜体表示)来描述RSS 。
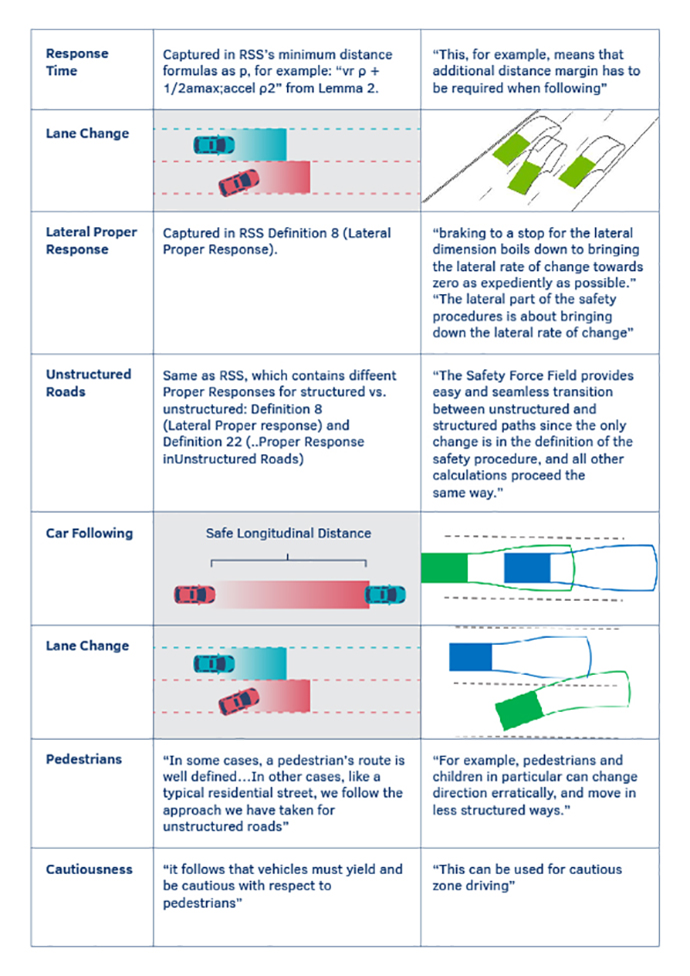
RSS covers occluded agents such as vehicles hidden behind buildings and pedestrians hidden behind cars. So does SFF.
RSS defines reasonable expectations on the behavior of other agents, such as the expected maximum braking. So does SFF.
RSS defines Proper Responses for both structured and unstructured roads. So does SFF.
RSS defines a “response time” of how long it will take the AV to respond to a change in situation. So does SFF, though it is renamed “reaction time.”
RSS定义了 车辆周围的安全纵向距离 和 安全横向 距离。当这些安全距离受到影响时,车辆处于危险状况 ,必须执行适当的响应。车辆必须执行正确响应的特定时刻称为危险阈值。
SFF使用稍微修改的术语定义了相同的概念。 安全纵向距离 被称为“一维SFF”; 安全横向距离 被描述为“高尺寸SFF”。SFF使用“安全程序”代替正确的响应。取而代之的危局,SFF与替换“不安全的情况。” ,为了完整起见,SFF还认识到存在危险阈值,而不是将其称为“关键时刻”。
RSS涵盖了被遮挡的特工,例如隐藏在建筑物后面的车辆和隐藏在汽车后面的行人。SFF也是如此。
RSS对其他代理的行为定义了合理的期望,例如期望的最大制动。SFF也是如此。
RSS为结构化和非结构化道路定义了正确的响应。SFF也是如此。
RSS定义了AV响应情况变化所花费的时间的“响应时间”。SFF也是如此,尽管被重命名为“反应时间”。
In fact, every one of the five “common sense” rules defined by RSS are replicated in SFF:
- Do not hit someone from behind.
- Do not cut-in recklessly.
- Right-of-way is given, not taken.
- Be careful of areas with limited visibility.
- If you can avoid an accident without causing another one, you must do it.
实际上,RSS定义的五个“常识”规则中的每一个都在SFF中复制:
- 不要从后面撞人。
- 不要鲁莽cut切入。
- 给予通行权,而不是获取通行权。
- 注意能见度有限的区域。
- 如果可以避免发生事故,而又不引起其他事故,则必须这样做。
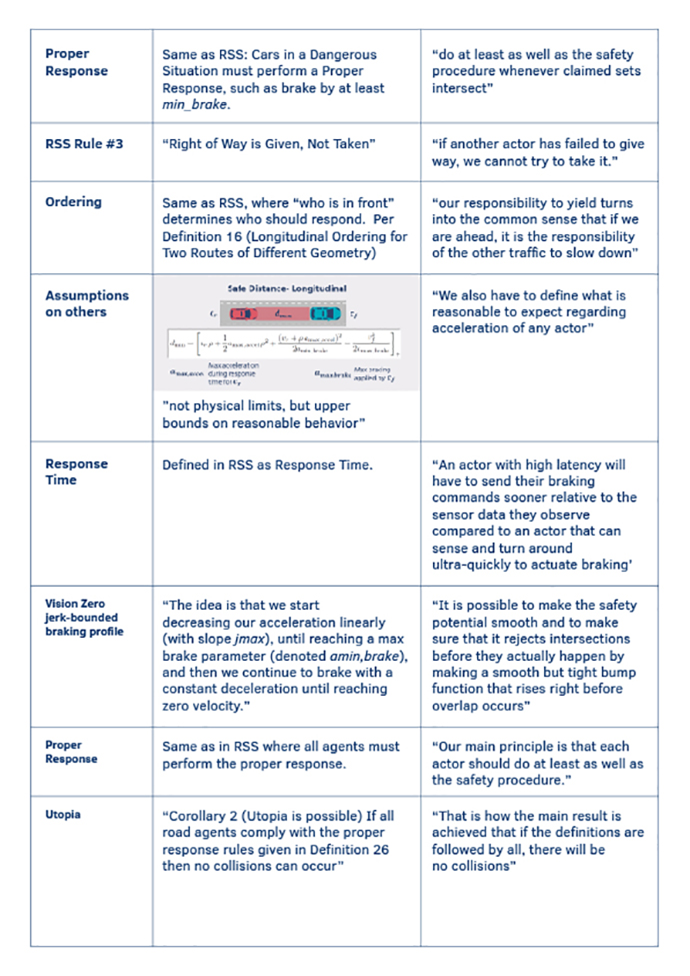
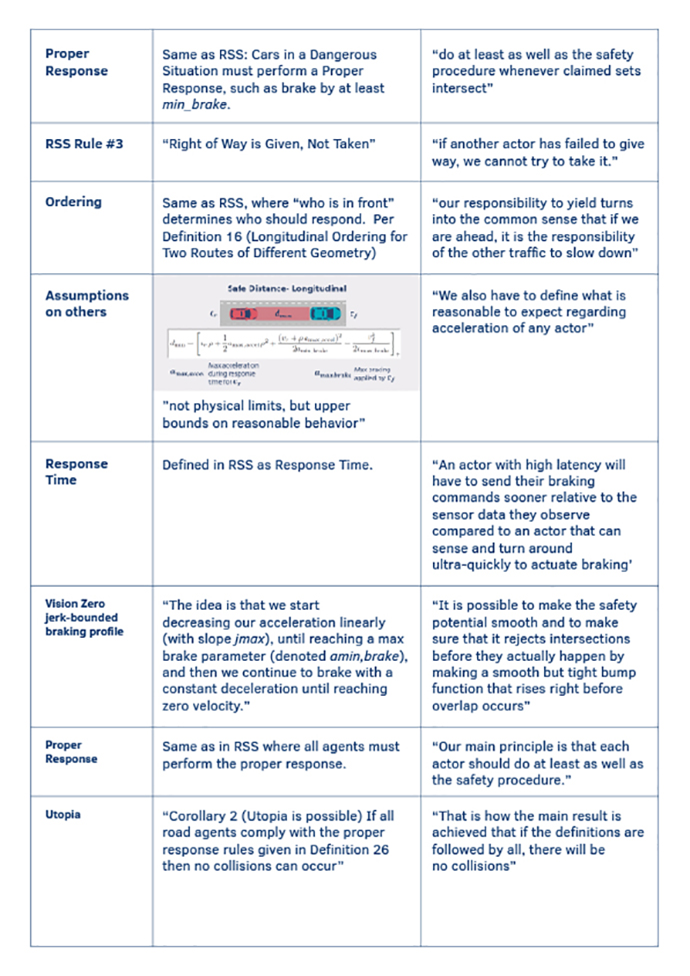
Before we spell out the similarities in more detail below, let’s talk about what an AV safety model is really about. At the heart of the construction lies the concept of a “Proper Response” in RSS terminology (“Safety Procedure” in SFF terminology). In our opinion, to really implement an AV safety model, one must explicitly specify this Proper Response – which Mobileye has done. We invested a great deal of thought to make RSS comply with three crucial properties:
- Sound: The Proper Response of RSS complies with the common sense of human judgment.
- Usefulness: RSS enables agile driving policy.
- Efficiently verifiable: it is possible to comply with RSS rules in a computational efficient manner.
Without an explicitly defined Proper Response, no practical implementation is possible. We attempted to evaluate SFF’s so-called “Safety Procedure,” but we were unable to find it in the SFF paper, except for one simple example that, in our opinion, is too simplistic and yields a non-useful driving policy. The SFF paper appears to be non-transparent where the most important ingredient is missing from the model. We encourage Nvidia to be more transparent about the details of its Safety Procedure so that the industry is better able to evaluate its safety and efficacy. And although we enjoy flattery as much as anyone else, we hope that SFF’s Safety Procedure is based on independent innovation as opposed to imitation of Mobileye’s technology leadership. But don’t take my word for it, let’s let the text speak for itself:
下面详细说明相似之处之前,先谈谈真正的AV安全模型。构建的核心是RSS术语中的“适当响应”(SFF术语中的“安全程序”)的概念。要真正实现视听安全模型,必须明确指定此正确响应-Mobileye已完成。投入了大量精力使RSS符合以下三个关键属性:
- 声音:RSS的正确响应符合人类判断的常识。
- 有用性:RSS启用了敏捷驾驶策略。
- 有效验证:可以以计算有效的方式遵守RSS规则。
没有明确定义的适当响应,就不可能实际实施。试图评估SFF的所谓“安全程序”,但无法在SFF论文中找到,除了一个简单的示例,该示例过于简单并产生了无用的驾驶政策。SFF纸张似乎是不透明的,其中模型中缺少最重要的成分。鼓励Nvidia在其安全程序的细节方面更加透明,以便业界更好地评估其安全性和有效性。尽管和其他人一样赞美,希望SFF的安全程序基于自主创新,而不是模仿Mobileye的技术领先地位。让文字说明一切:

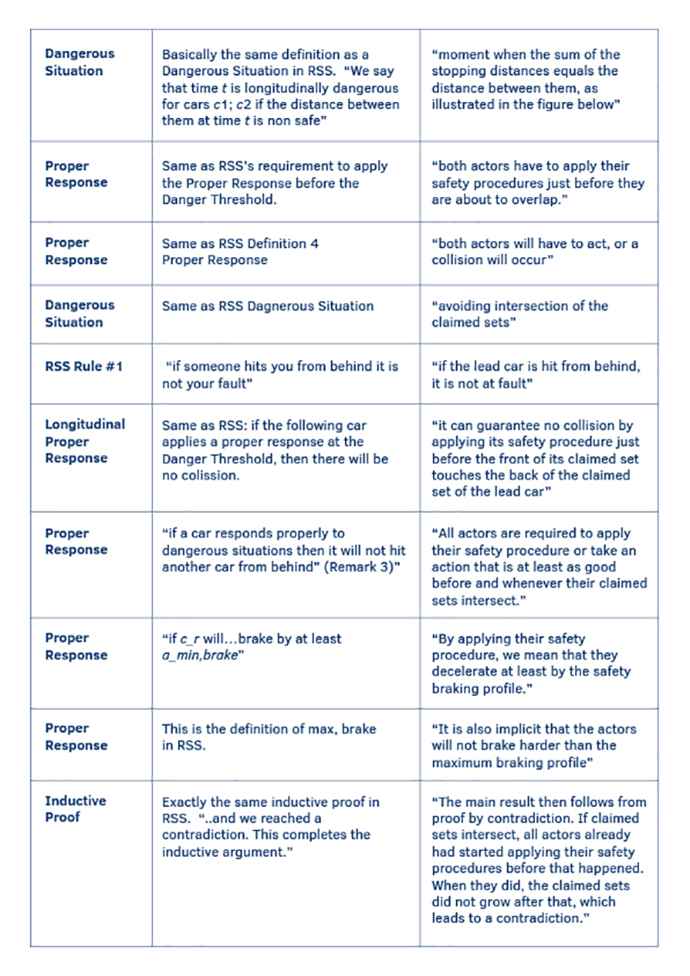
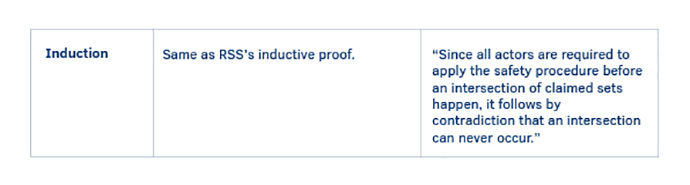
This analysis clearly shows that SFF is a close replica of RSS. It is indisputable that RSS was, in fact, the “first-of-its-kind” safety model for AV’s when we announced it in 2017, and we believe it is still the leading solution today.
At Mobileye, we believe in technology innovation, not linguistic innovation. We have openly invited and are enjoying active collaboration with industry and government partners around the globe. It is unfortunate that rather than collaborate with us, Nvidia felt it necessary to follow us yet again, creating confusion where there could have been cohesion. Mobileye has invested enormous resources to develop RSS, and Mobileye has obtained intellectual property rights to protect these investments.
该分析清楚地表明,SFF是RSS的近似副本。毫无疑问,在2017年宣布RSS时,RSS实际上是AV的“同类首创”安全模型,并且仍然是当今领先的解决方案。
在Mobileye,相信技术创新,而不是语言创新。已公开邀请并与全球行业和政府合作伙伴保持积极的合作关系。不幸的是,英伟达没有合作,而是有必要再次关注,在本来可以凝聚的地方造成混乱。Mobileye已投入大量资源来开发RSS,并且Mobileye已获得知识产权来保护这些投资。