RADAR和LIDAR区别分析
如果一直关注自动驾驶汽车的新闻,可能已经注意到许多自动驾驶汽车制造商正在使用LIDAR(光成像检测和测距)进行车载物体检测。对于许多自动 驾驶汽车应用而言,LIDAR比其他常用的对象检测技术RADAR(无线电检测和测距)更好。但是,当需要经受恶劣环境的高质量,负担得起的物体检测时,雷达是一个明智的选择。原因如下:
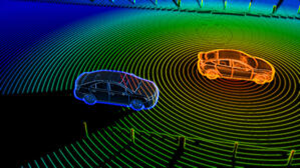
LIDAR传感器通过发出高频激光脉冲然后测量其中一些脉冲撞击物体,反弹并撞击传感器所需的时间(以纳秒为单位)来找到物体。随着物体的移动,LIDAR传感器内部的处理器会保存有关每个返回脉冲的信息,并可以生成物体的精确3D图像,物体相对于设备的位置,物体向哪个方向移动以及移动的速度。一个激光雷达图像可以非常准确,它不仅能检测行人100公尺远,知道面对哪个方向。LIDAR甚至已用于跟踪树叶和树枝的生长,以衡量森林的总体生长。
随着无人驾驶汽车的媒体报道不断增加,LIDAR经常成为新闻,因此许多人错误地认为这是一项新技术。美国军方和NASA在1970年代发明了LIDAR,尽管直到1990年代它才被“使用”,直到现在仍被用作地理地图工具。简而言之,激光雷达是一种非常精确的工具,可以检测物体的形状和位置。它能够创建高度详细的图像,并在100码外的物体上重新创建不到一英寸的细节。缺点是这是一项昂贵的技术。
如果说LIDAR是牧场上的漂亮小马,那么RADAR就是主力军。RADAR于1940年发明,
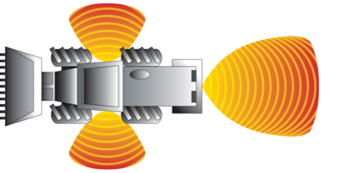
其返回的物体图像不如LIDAR精确,但它可以在雨,雪,雨夹雪,冰雹,雾,泥和尘土中返回。它在夜间和阴天条件下也比激光雷达更准确。RADAR的工作方式与LIDAR相似,但它发出的是无线电波而不是激光束。由于激光波比无线电波短,因此激光雷达可以生成更详细的物体图像。尽管无线电波不仅具有探测人类的能力,它还可以探测到比雷达小的得多的物体。无线电波和光波都以相同的速度(每秒186,000英里)传播,因此这两个系统都以相同的速度刷新对象位置数据。
RADAR系统的成本大大低于LIDAR系统,后者通常需要昂贵的组件,例如高速电子设备,CCD接收器,光学器件,电机以及激光器本身。车载摄像头,反光镜和盲点检测传感器将为这两个系统提供支持。
本文的重点并不是说这些对象检测技术中的一种优于另一种。如果设备通常在恶劣的环境(例如建筑工地或矿山)中运行,则RADAR会更有意义。 除了LIDAR系统外,将RADAR添加为侧弯辅助系统或后盲点监视系统,只会为操作员,其他驾驶员和易受伤害的道路使用者提高安全性。