动态规划理论
一个模型三个特征
- 多阶段决策最优解模型
- 最优子结构
- 最优子结构指的是,问题的最优解包含子问题的最优解。反过来说就是,我们可以通过子问题的最优解,推导出问题的最优解。
- 如果我们把最优子结构,对应到我们前面定义的动态规划问题模型上,那我们也可以理解为,后面阶段的状态可以通过前面阶段的状态推导出来。
- 无后效性
- 无后效性有两层含义,第一层含义是,在推导后面阶段的状态的时候,我们只关心前面阶段的状态值,不关心这个状态是怎么一步一步推导出来的。
- 第二层含义是,某阶段状态一旦确定,就不受之后阶段的决策影响。无后效性是一个非常“宽松”的要求。只要满足前面提到的动态规划问题模型,其实基本上都会满足无后效性。
- 重复子问题
- 这个概念比较好理解。前面一节,我已经多次提过。如果用一句话概括一下,那就是,不同的决策序列,到达某个相同的阶段时,可能会产生重复的状态。
结合例子理解理论
- 假设我们有一个 n 乘以 n 的矩阵 w[n][n]。矩阵存储的都是正整数。棋子起始位置在左上角,终止位置在右下角。我们将棋子从左上角移动到右下角。每次只能向右或者向下移动一位。从左上角到右下角,会有很多不同的路径可以走。我们把每条路径经过的数字加起来看作路径的长度。那从左上角移动到右下角的最短路径长度是多少呢?

- 一个模型:
- 从 (0, 0) 走到 (n-1, n-1),总共要走 2*(n-1) 步,也就对应着 2*(n-1) 个阶段。
- 每个阶段都有向右走或者向下走两种决策,并且每个阶段都会对应一个状态集合。
- 我们把状态定义为 min_dist(i, j),其中 i 表示行,j 表示列。min_dist 表达式的值表示从 (0, 0) 到达 (i, j) 的最短路径长度。所以,这个问题是一个多阶段决策最优解问题,符合动态规划的模型。
- 三个特征:
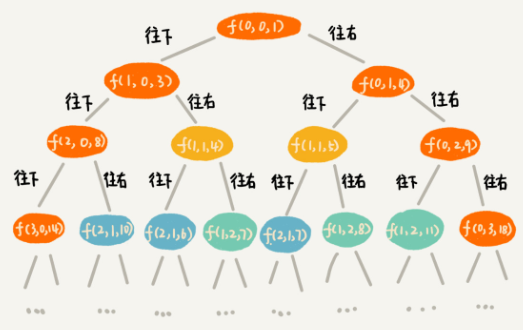
- 画一下递归树会发现有重复的节点,表示从左上角到节点对应的位置,有多种路线,说明这个问题中存在重复子问题。
- 计算 (i, j) 位置对应的状态,只需要关心 (i-1, j),(i, j-1) 两个位置对应的状态,前面阶段的状态确定之后,不会被后面阶段的决策所改变,符合“无后效性”。
- 把从起始位置 (0, 0) 到 (i, j) 的最小路径,记作 min_dist(i, j),min_dist(i, j) 可以通过 min_dist(i, j-1) 和 min_dist(i-1, j) 两个状态推导出来,符合“最优子结构”。
两种动态规划解题思路总结
- 状态转移表法解题思路大致可以概括为,回溯算法实现 - 定义状态 - 画递归树 - 找重复子问题 - 画状态转移表 - 根据递推关系填表 - 将填表过程翻译成代码。
- 状态转移方程法的大致思路可以概括为,找最优子结构 - 写状态转移方程 - 将状态转移方程翻译成代码。
- 状态转移表法
- 先使用回溯算法的暴力搜索解决,画出递归树,判断是否存在重复子问题,找出规律看是否可用动态规划解决。
- 如果存在,两种解决方法:
- 使用回溯+备忘录解决重复节点
- 状态转移表法:
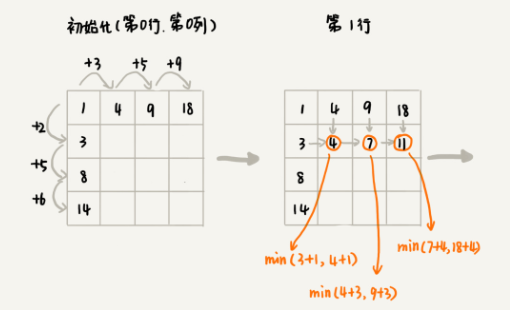
- 先画出一个状态表。状态表一般都是二维的,所以你可以把它想象成二维数组。
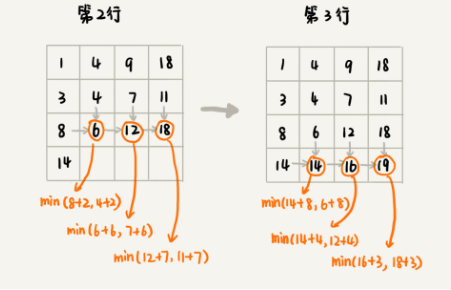
- 其中,每个状态包含三个变量,行、列、数组值。我们根据决策的先后过程,从前往后,根据递推关系,分阶段填充状态表中的每个状态。最后,我们将这个递推填表的过程,翻译成代码,就是动态规划代码了。
- 应用:解决上面最短路径问题
- 先回溯算法穷举
-
private int minDist = Integer.MAX_VALUE; // 全局变量或者成员变量 // 调用方式:minDistBacktracing(0, 0, 0, w, n); public void minDistBT(int i, int j, int dist, int[][] w, int n) { // 到达了n-1, n-1这个位置了,这里看着有点奇怪哈,你自己举个例子看下 if (i == n && j == n) { if (dist < minDist) minDist = dist; return; } if (i < n) { // 往下走,更新i=i+1, j=j minDistBT(i + 1, j, dist+w[i][j], w, n); } if (j < n) { // 往右走,更新i=i, j=j+1 minDistBT(i, j+1, dist+w[i][j], w, n); } }
- 画出递归树,以此来寻找重复子问题, (i, j) 重复的节点,我们只需要选择 dist 最小的节点,继续递归求解,其他节点就可以舍弃了
-
画出一个二维状态表
-
public int minDistDP(int[][] matrix, int n) { int[][] states = new int[n][n]; int sum = 0; for (int j = 0; j < n; ++j) { // 初始化states的第一行数据 sum += matrix[0][j]; states[0][j] = sum; } sum = 0; for (int i = 0; i < n; ++i) { // 初始化states的第一列数据 sum += matrix[i][0]; states[i][0] = sum; } for (int i = 1; i < n; ++i) { for (int j = 1; j < n; ++j) { states[i][j] = matrix[i][j] + Math.min(states[i][j-1], states[i-1][j]); } } return states[n-1][n-1]; }
-
状态转移方程法
-
类似递归的解题思路。我们需要分析,某个问题如何通过子问题来递归求解,也就是所谓的最优子结构。
-
根据最优子结构,写出递归公式,也就是所谓的状态转移方程。有了状态转移方程,代码实现就非常简单了。
-
一般情况下,我们有两种代码实现方法,一种是递归加“备忘录”,另一种是迭代递推。
-
强调:状态转移方程是解决动态规划的关键,写出状态转移方程,问题就解决了一半!!
-
应用:解决上面的最短路径问题
-
状态转移方程:
min_dist(i, j) = w[i][j] + min(min_dist(i, j-1), min_dist(i-1, j))
-
实现代码
-
private int[][] matrix = {{1,3,5,9}, {2,1,3,4},{5,2,6,7},{6,8,4,3}}; private int n = 4; private int[][] mem = new int[4][4]; public int minDist(int i, int j) { // 调用minDist(n-1, n-1); if (i == 0 && j == 0) return matrix[0][0]; if (mem[i][j] > 0) return mem[i][j]; int minLeft = Integer.MAX_VALUE; if (j-1 >= 0) { minLeft = minDist(i, j-1); } int minUp = Integer.MAX_VALUE; if (i-1 >= 0) { minUp = minDist(i-1, j); } int currMinDist = matrix[i][j] + Math.min(minLeft, minUp); mem[i][j] = currMinDist; return currMinDist; }
-
-
四种算法思想比较分析
- 分类
- 贪心、回溯、动态规划:解决多阶段决策最优解模型。
- 分治:解决的问题尽管大部分也是最优解问题,但是,大部分都不能抽象成多阶段决策模型
- 回溯算法:
- 相当于穷举搜索,“万金油”,基本上能用的动态规划、贪心解决的问题,我们都可以用回溯算法解决。
- 时间复杂度高:指数级
- 动态规划:
- 动态规划比回溯算法高效。
- 需要满足一个模型三个特征。
- 动态规划和分治算法在重复子问题上区分非常明显。分治算法要求分割成的子问题,不能有重复子问题,而动态规划正好相反,动态规划之所以高效,就是因为回溯算法实现中存在大量的重复子问题。
- 贪心算法
- 动态规划算法的一种特殊情况。
- 更加高效,代码实现也更加简洁。
- 可以解决的问题也更加有限。它能解决的问题需要满足三个条件,最优子结构、无后效性和贪心选择性(这里我们不怎么强调重复子问题)。
- 贪心选择性”的意思是,通过局部最优的选择,能产生全局的最优选择。