二叉树(Binary Tree)
树
- 根节点、父节点、兄弟节点、叶子节点
-
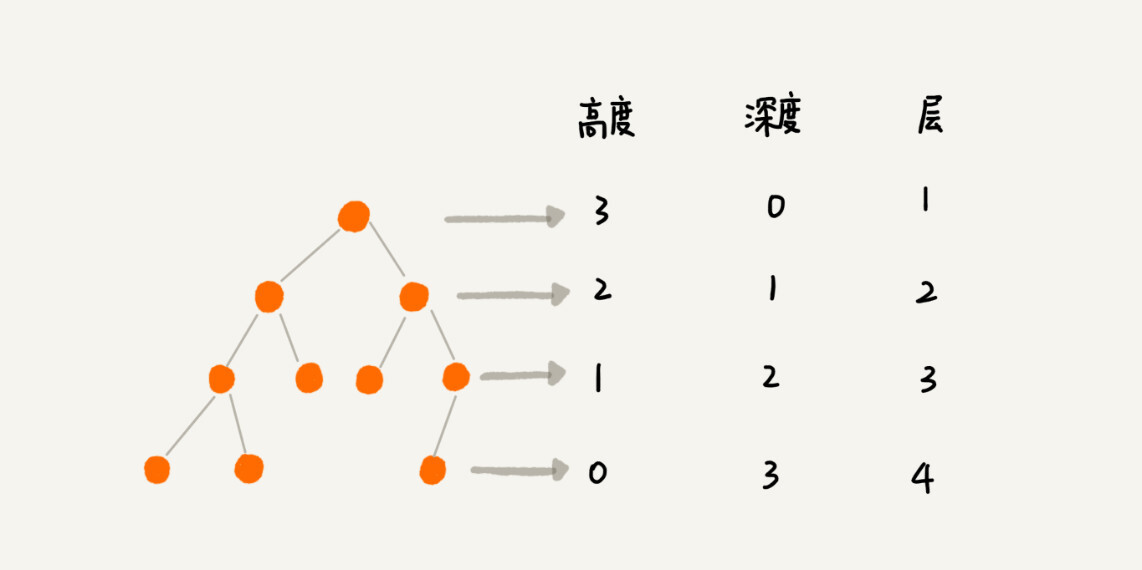
高度、深度、层的概念
二叉树
顾名思义,每个节点最多有两个“叉”,也就是两个子节点,分别是左子节点和右子节点,并不要求都要有二个节点,有的只有左节点,有的只有右节点
满二叉树
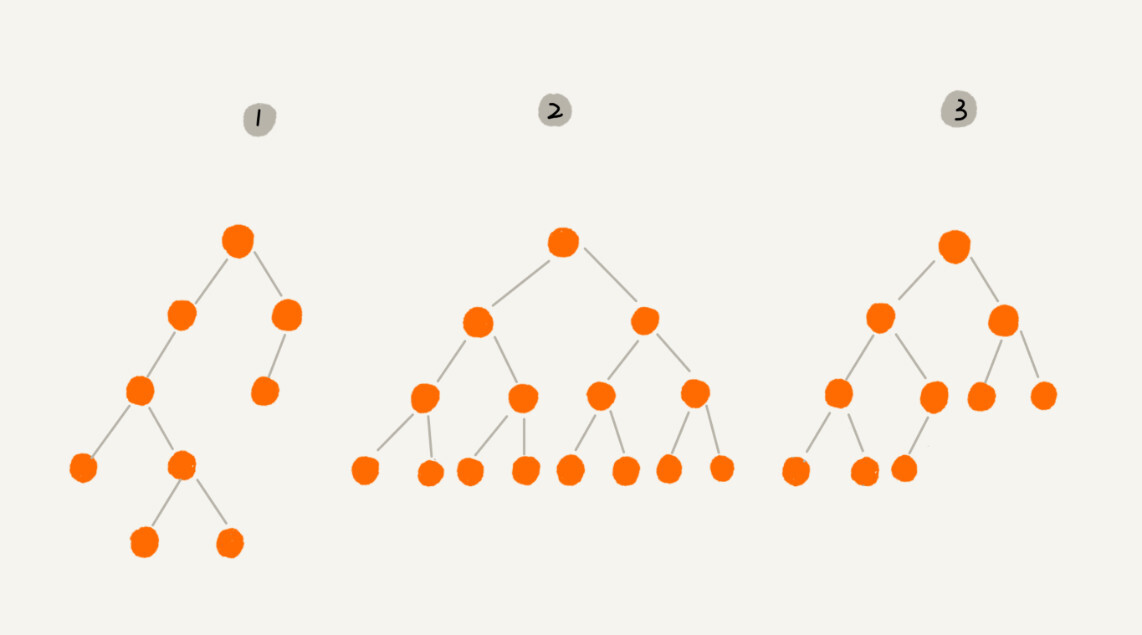
- 图中编号2的二叉树,叶子节点全都在最底层,除了叶子节点之外,每个节点都有左右两个子节点,这种二叉树就叫作满二叉树
完全二叉树
- 图中编号3的二叉树,叶子节点都在最底下两层,最后一层的叶子节点都靠左排列,并且除了最后一层,其他层的节点个数都要达到最大,这种二叉树叫作完全二叉树
如何表示(或者存储)一棵二叉树?
- 链式存储法
- 顺序存储法
- 基于数组
- 如果节点 X 存储在数组中下标为 i 的位置,
- 下标为 2 * i 的位置存储的就是左子节点,
- 下标为 2 * i + 1 的位置存储的就是右子节点。
- 反过来,下标为 i/2 的位置存储就是它的父节点。通过这种方式,我们只要知道根节点存储的位置(一般情况下,为了方便计算子节点,根节点会存储在下标为 1 的位置),这样就可以通过下标计算,把整棵树都串起来。
- 适用于完全二叉树,如果是非完全二叉树会浪费空间;
- 堆就是完全二叉树,且常使用数组存储数据
二叉树的遍历
- 前序遍历--访问顺序:父节点--》左子节点--》右子节点
- 中序遍历--访问顺序:左子节点--》父节点--》右子节点
- 后序遍历--访问顺序:左子节点--》右子节点--》父节点
二叉查找树(Binary Search Tree)
- 概念
在树中的任意一个节点,其左子树中的每个节点的值,都要小于这个节点的值,而右子树节点的值都大于这个节点的值。
- 能实现快速查找、插入、删除
- 查找--从根节点开始比较,小于则在左子树递归查找,大于则在右子树递归查找
- 插入--从根节点开始比较,小于则:1.左子树为空,则插入左子树;2.左子树不空,则左子树递归查找插入; 大于则:1.右子树为空,则插入右子树;2.右子树不空,则右子树递归查找插入。
- 删除--三种情况:
- 1.删除节点无子节点--父节点指向该节点指针置为null;
- 2.删除节点只有一个子节点(左或右)--父节点指向该节点指针指向该节点的子节点;
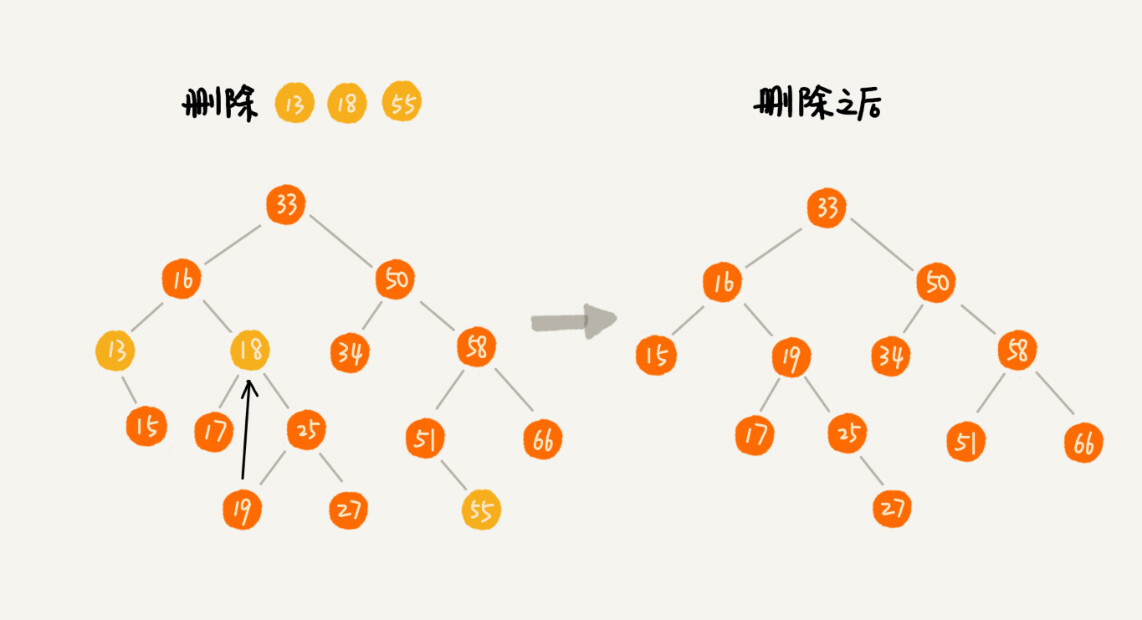
- 3.删除节点有两个子节点--需要找到这个节点的右子树中的最小节点,把它替换到要删除的节点上。然后再删除掉这个最小节点。如下图删除节点18
- 其他操作
快速地查找最大节点和最小节点、前驱节点和后继节点
支持重复数据的二叉查找树
- 插入时,节点值相同,则插入相同节点的右子树。
- 查找时,遇到值相同,则不停止查找,继续在右子树查找直至叶子节点。
- 删除时,先找到值相同的所有节点,然后按照二叉树节点删除方法依次删除。
复杂度分析
- 理想情况下,二叉查找树是一个完全二叉树,复杂度跟高度相关O(height),完全二叉树的高度小于等于logn,所以插入、删除、查找时间复杂度均为O(logn)
- 最坏情况下,二叉查找树退化为链表,查找时间复杂度为O(n)
二叉查找树相对散列表的优势
- 散列表无序,二叉查找树中序遍历可在O(n)时间复杂度内输出有序数据序列。
- 散列表扩容耗时很多,遇到散列冲突时,性能不稳定;平衡二叉树性能稳定在O(logn)。
- 散列表由于散列冲突的存在,其常量级的查找时间复杂度再加上hash函数的耗时不一定比O(logn)效率高。
- 散列表构造复杂,需考虑散列函数的设计、冲突解决办法、扩容、缩容等,平衡二叉查找树只需要考虑平衡性这一个问题,而且这个问题的解决方案比较成熟、固定。
- 为避免过多的散列冲突,散列表装载因子不能太大,特别是基于开放寻址法解决冲突的散列表,不然会浪费一定的存储空间。
二叉树高度计算
- 深度优先遍历计算 max(左右子树高度)+1