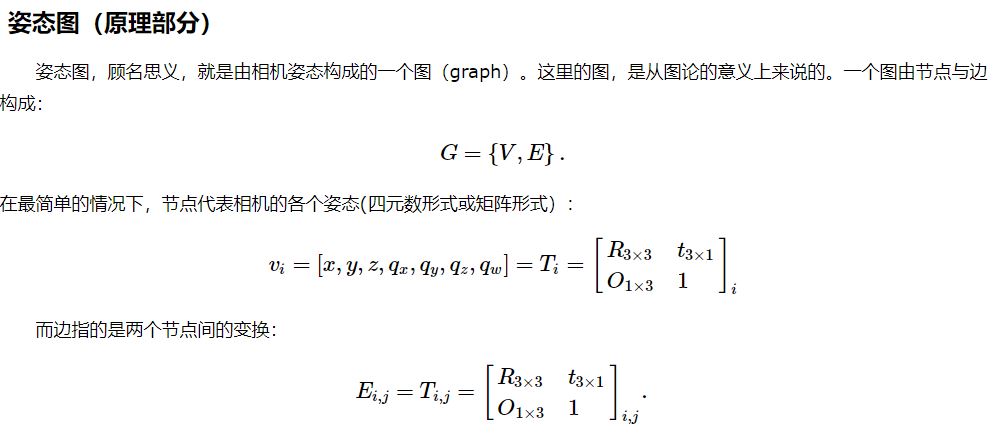
注意到位姿节点之间的变换并不是位姿,之前一直有误解;
一般地;
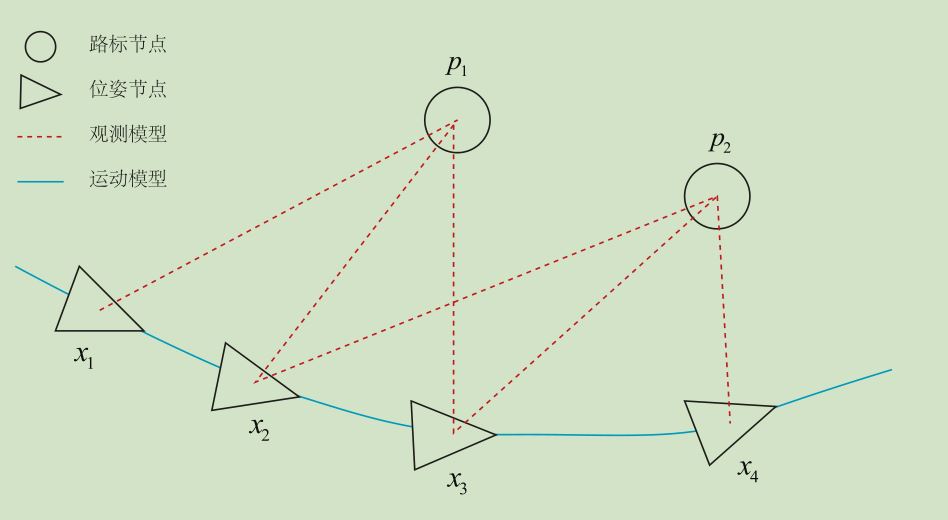
路标节点:也就是观测方程【数学形式下见】的观测值,也就是特征点的像素坐标[u,v],或者该帧相机坐标系下的3d坐标[x,y,z];
位姿节点:也就是运动方程【数学形式下见】的输出值。例如:上述x1、x2、x3、X4对应位姿为:Tcw1、Tcw2、Tcw3、Tcw4。这里的Tcw表示对应帧相机坐标系->世界坐标系的变换;比如:在x1处看到了路标点p1,在x2处也看到了路标点p1(当然是通过特征匹配才知道再次看到)考虑以下两种情况:
1> x1对应第一帧,x2对应第二帧
那么x1的相机坐标系即为:世界坐标系;那么第一帧位姿我们直接初始化为:
第二帧我们要:通过……solvePNPransac(points3d_1, points2d_2,R,t);来求解,points3d_1对应的是世界坐标系下的3D点(在这种情形,第一帧相机坐标系也就是世界坐标系,所以第一帧相机坐标系下的3D点), points2d_2是第二帧像素点(设第二帧对应3D路标点(在第二帧相机坐标系下)为:points3d_2)。
在这里[左乘],
Tcw2 * points3d_1 = points3d_2
同时必须知道:(假设两帧之间的变换 T12,也就是 位姿变换)
T12 * Tcw1 = Tcw2
2> x2对应第2帧,x3对应第3帧
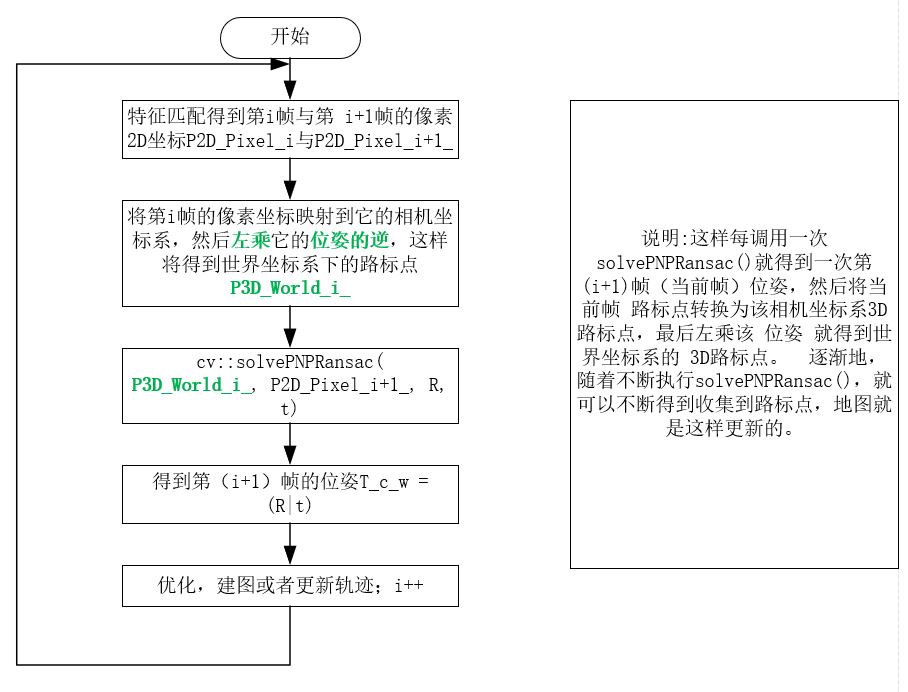
接着,我们再次想通过solvePNPransac(points3d_2_, points2d_3,R,t)来求解Tcw3,points3d_2_ (世界坐标系)肯定不是 points3d_2(相机坐标系),所以在第一种情形你就应该提前将points3d_2 从它所在的相机坐标系映射到世界坐标系,故:
points3d_2_ = Tcw2.inverse() * points3d_2
我们得出流程图如下图:
观测模型:具体见下
运动模型:具体见下
两个模型与G2O结合了解说明;
位姿:位置和姿态;
对于上述位姿图,我们假设 x1 对应参考帧 ref_(同时假设是第一帧),x2对应 当前帧curr_(同时假设是第二帧);我们通过......最后通过opencv中API solvePNPransac();求出的R|t 其实是Tcw;
Tcw指的是:当前帧与世界坐标系之间的变换;
Trw指的是:参考帧与世界坐标系之间的变换。那么待估计的两帧之间的变换为:Tcr,构成左乘关系:
Tcr, s.t. Tcr * Trw = Tcw
P_camera_curr 指的是:当前帧3D路标点 (相机坐标系)
P_world_ref 指的是:参考帧3D路标点 (世界坐标系)
P_camera_curr = Tcw*P_world_ref
这里 opencv中的 solvePNPransac 求出来的是 T = (R|t);依据上述公式:所以你要将当前帧3D路标点转化到世界坐标系,应该是左乘:Tcw.inverse() * P_camera_curr = P_world_ref;请看以下代码【就是匹配,第一帧相机坐标系当作世界坐标系,第二帧就是相机坐标系,重点关注代码 81行 - 124行】:


1 #include <iostream> 2 #include <opencv2/core/core.hpp> 3 #include <opencv2/features2d/features2d.hpp> 4 #include <opencv2/highgui/highgui.hpp> 5 #include <opencv2/calib3d/calib3d.hpp> 6 #include <Eigen/Core> 7 #include <Eigen/Geometry> 8 #include <g2o/core/base_vertex.h> 9 #include <g2o/core/base_unary_edge.h> 10 #include <g2o/core/block_solver.h> 11 #include <g2o/core/optimization_algorithm_levenberg.h> 12 #include <g2o/solvers/csparse/linear_solver_csparse.h> 13 #include <g2o/types/sba/types_six_dof_expmap.h> 14 #include <chrono> 15 16 using namespace std; 17 using namespace cv; 18 19 #include"sophusse3.h" 20 #include"sophusso3.h" 21 22 void find_feature_matches( 23 const Mat& img_1, const Mat& img_2, 24 std::vector<KeyPoint>& keypoints_1, 25 std::vector<KeyPoint>& keypoints_2, 26 std::vector< DMatch >& matches); 27 28 // 像素坐标转相机归一化坐标 29 Point2d pixel2cam(const Point2d& p, const Mat& K); 30 31 void bundleAdjustment( 32 const vector<Point3f> points_3d, 33 const vector<Point2f> points_2d, 34 const Mat& K, 35 Mat& R, Mat& t 36 ); 37 38 int main() 39 { 40 //-- 读取图像 41 Mat img_1 = imread("color/b.png", CV_LOAD_IMAGE_COLOR); 42 Mat img_2 = imread("color/c.png", CV_LOAD_IMAGE_COLOR); 43 44 vector<KeyPoint> keypoints_1, keypoints_2; 45 vector<DMatch> matches; 46 find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches); 47 cout << "一共找到了" << matches.size() << "组匹配点" << endl; 48 49 // 建立3D点 50 Mat depth_1 = imread("depth/b.pgm", CV_LOAD_IMAGE_UNCHANGED); // 深度图为16位无符号数,单通道图像 51 Mat depth_2 = imread("depth/c.pgm", CV_LOAD_IMAGE_UNCHANGED); // 深度图为16位无符号数,单通道图像 52 //Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1); 53 Mat K = (Mat_<double>(3, 3) << 518.0, 0, 325.5, 0, 519.0, 253.5, 0, 0, 1); 54 vector<Point3f> pts_3d1;//世界坐标点 55 vector<Point3f> pts_3d2; 56 vector<Point2f> pts_2d;//相机坐标系点(归一化???) 57 //【注:】这里表示同一个3D点在两幅图中的图二对应像素点,本来就是求世界坐标系下的r、t 58 for (DMatch m : matches) 59 { 60 //取出深度值,此时彩图和深度图已经对齐 61 ushort d1 = depth_1.ptr<unsigned short>(int(keypoints_1[m.queryIdx].pt.y))[int(keypoints_1[m.queryIdx].pt.x)]; 62 ushort d2 = depth_2.ptr<unsigned short>(int(keypoints_2[m.trainIdx].pt.y))[int(keypoints_2[m.trainIdx].pt.x)]; 63 if ((d1 == 0) || (d2 == 0)) // bad depth 64 continue; 65 float dd1 = d1 / 1.0; 66 float dd2 = d2 / 1.0; 67 Point2d p1 = pixel2cam(keypoints_1[m.queryIdx].pt, K); // 相机坐标系归一化平面:p1的形式 [x/z,y/z,1] 68 Point2d p2 = pixel2cam(keypoints_2[m.trainIdx].pt, K); 69 pts_3d1.push_back(Point3f(p1.x*dd1, p1.y*dd1, dd1));//乘以Z就得到形式 [x,y,z]?????左边相机为参考,把他当作世界坐标系,确实是这样的 70 pts_3d2.push_back(Point3f(p2.x*dd2, p2.y*dd2, dd2)); 71 pts_2d.push_back(keypoints_2[m.trainIdx].pt);//图二中的2D像素坐标[u,v] 72 } 73 74 cout << "3d-2d pairs: " << pts_3d1.size() << endl; 75 76 Mat r, t; 77 // 调用OpenCV 的 PnP 求解r t,可选择EPNP,DLS等方法 78 //solvePnP(pts_3d, pts_2d, K, Mat(), r, t, false); 79 //solvePnP(pts_3d1, pts_2d, K, Mat(), r, t, false, SOLVEPNP_EPNP); 80 81 cv::solvePnPRansac(pts_3d1, pts_2d, K, Mat(), r, t, false, 100, 1.0, 0.99); 82 83 Mat R; 84 cv::Rodrigues(r, R); // r为旋转向量形式,用Rodrigues公式转换为矩阵 85 //RR = -R.inv(); 86 cout << "R=" << endl << R << endl; 87 cout << "t=" << endl << t << endl; 88 //************************************************************************************************ 89 // 李群 90 //************************************************************************************************ 91 Sophus::SE3 T_se3 = Sophus::SE3( 92 Sophus::SO3(r.at<double>(0, 0), r.at<double>(1, 0), r.at<double>(2, 0)), 93 Sophus::Vector3d(t.at<double>(0, 0), t.at<double>(1, 0), t.at<double>(2, 0)) 94 ); 95 cout << "T_se3 = " << T_se3.matrix() << endl; 96 //************************************************************************************************ 97 // 欧氏群 98 //************************************************************************************************ 99 Eigen::Isometry3d T_Isometry3d = Eigen::Isometry3d::Identity(); 100 //Eigen::AngleAxisd rot_vec(r.at<double>(0, 0), r.at<double>(1, 0), r.at<double>(2, 0)); 101 Eigen::Vector3d trans(t.at<double>(0, 0), t.at<double>(1, 0), t.at<double>(2, 0)); 102 Eigen::Matrix<double, 3, 3> R_; 103 R_ << R.at<double>(0,0), R.at<double>(0,1), R.at<double>(0,2), 104 R.at<double>(1,0), R.at<double>(1,1), R.at<double>(1,2), 105 R.at<double>(2,0), R.at<double>(2,1), R.at<double>(2,2); 106 T_Isometry3d.rotate(R_); 107 T_Isometry3d.pretranslate(trans); 108 cout << " T_Isometry3d = " << T_Isometry3d.matrix() << endl; 109 110 cout << "calling bundle adjustment" << endl; 111 bundleAdjustment(pts_3d1, pts_2d, K, R, t); 112 //************************************************************************************************ 113 // 计算误差:error = point3d_curr -( R * point3d_ref + t ) 114 //************************************************************************************************ 115 for (int i = 0; i < 20; i++) 116 { 117 cout << " pts_3d1 = " << pts_3d1[i] << endl; 118 cout << " pts_3d2 = " << pts_3d2[i] << endl; 119 cout << " error " << 120 (Mat_<double>(3, 1) << pts_3d2[i].x, pts_3d2[i].y, pts_3d2[i].z) 121 - R*((Mat_<double>(3, 1) << pts_3d1[i].x, pts_3d1[i].y, pts_3d1[i].z)) - t 122 << endl; 123 cout << endl; 124 } 125 126 waitKey(0); 127 return 0; 128 } 129 130 void find_feature_matches(const Mat& img_1, const Mat& img_2, 131 std::vector<KeyPoint>& keypoints_1, 132 std::vector<KeyPoint>& keypoints_2, 133 std::vector< DMatch >& matches) 134 { 135 //-- 初始化 136 Mat descriptors_1, descriptors_2; 137 // used in OpenCV3 138 Ptr<FeatureDetector> detector = ORB::create(1000); 139 Ptr<DescriptorExtractor> descriptor = ORB::create(); 140 // use this if you are in OpenCV2 141 // Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" ); 142 // Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" ); 143 Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming"); 144 //-- 第一步:检测 Oriented FAST 角点位置 145 detector->detect(img_1, keypoints_1); 146 detector->detect(img_2, keypoints_2); 147 148 //-- 第二步:根据角点位置计算 BRIEF 描述子 149 descriptor->compute(img_1, keypoints_1, descriptors_1); 150 descriptor->compute(img_2, keypoints_2, descriptors_2); 151 152 //-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离 153 vector<DMatch> match; 154 // BFMatcher matcher ( NORM_HAMMING ); 155 matcher->match(descriptors_1, descriptors_2, match); 156 157 //-- 第四步:匹配点对筛选 158 double min_dist = 10000, max_dist = 0; 159 160 //找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离 161 for (int i = 0; i < descriptors_1.rows; i++) 162 { 163 double dist = match[i].distance; 164 if (dist < min_dist) min_dist = dist; 165 if (dist > max_dist) max_dist = dist; 166 } 167 168 printf("-- Max dist : %f ", max_dist); 169 printf("-- Min dist : %f ", min_dist); 170 171 //当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限. 172 for (int i = 0; i < descriptors_1.rows; i++) 173 { 174 if (match[i].distance <= max(2 * min_dist, 30.0)) 175 { 176 matches.push_back(match[i]); 177 } 178 } 179 180 181 182 Mat img_match; 183 Mat img_goodmatch; 184 drawMatches(img_1, keypoints_1, img_2, keypoints_2, match, img_match); 185 drawMatches(img_1, keypoints_1, img_2, keypoints_2, matches, img_goodmatch); 186 namedWindow("所有匹配点对", CV_WINDOW_NORMAL); 187 imshow("所有匹配点对", img_match); 188 namedWindow("优化后匹配点对", CV_WINDOW_NORMAL); 189 imshow("优化后匹配点对", img_goodmatch); 190 } 191 192 Point2d pixel2cam(const Point2d& p, const Mat& K)// [u,v,1] - > [x/z, y/z, 1] 193 { 194 return Point2d 195 ( 196 (p.x - K.at<double>(0, 2)) / K.at<double>(0, 0), 197 (p.y - K.at<double>(1, 2)) / K.at<double>(1, 1) 198 ); 199 } 200 201 202 void bundleAdjustment( 203 const vector< Point3f > points_3d, 204 const vector< Point2f > points_2d, 205 const Mat& K, 206 Mat& R, Mat& t) 207 { 208 // 初始化g2o 209 typedef g2o::BlockSolver< g2o::BlockSolverTraits<6, 3> > Block; // pose 维度为 6, landmark 维度为 3 210 Block::LinearSolverType* linearSolver = new g2o::LinearSolverCSparse<Block::PoseMatrixType>(); // 线性方程求解器 211 Block* solver_ptr = new Block(linearSolver); // 矩阵块求解器 212 g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr); 213 g2o::SparseOptimizer optimizer; 214 optimizer.setAlgorithm(solver); 215 216 // vertex 217 g2o::VertexSE3Expmap* pose = new g2o::VertexSE3Expmap(); // camera pose 218 Eigen::Matrix3d R_mat; 219 R_mat << 220 R.at<double>(0, 0), R.at<double>(0, 1), R.at<double>(0, 2), 221 R.at<double>(1, 0), R.at<double>(1, 1), R.at<double>(1, 2), 222 R.at<double>(2, 0), R.at<double>(2, 1), R.at<double>(2, 2); 223 pose->setId(0); 224 pose->setEstimate(g2o::SE3Quat( 225 R_mat, 226 Eigen::Vector3d(t.at<double>(0, 0), t.at<double>(1, 0), t.at<double>(2, 0)) 227 )); 228 optimizer.addVertex(pose); 229 230 int index = 1; 231 for (const Point3f p : points_3d) // landmarks 232 { 233 g2o::VertexSBAPointXYZ* point = new g2o::VertexSBAPointXYZ(); 234 point->setId(index++); 235 point->setEstimate(Eigen::Vector3d(p.x, p.y, p.z)); 236 point->setMarginalized(true); // g2o 中必须设置 marg 参见第十讲内容 237 optimizer.addVertex(point); 238 } 239 240 // parameter: camera intrinsics 241 g2o::CameraParameters* camera = new g2o::CameraParameters( 242 K.at<double>(0, 0), Eigen::Vector2d(K.at<double>(0, 2), K.at<double>(1, 2)), 0 243 ); 244 camera->setId(0); 245 optimizer.addParameter(camera); 246 247 // edges 248 index = 1; 249 for (const Point2f p : points_2d) 250 { 251 g2o::EdgeProjectXYZ2UV* edge = new g2o::EdgeProjectXYZ2UV(); 252 edge->setId(index); 253 edge->setVertex(0, dynamic_cast<g2o::VertexSBAPointXYZ*> (optimizer.vertex(index))); 254 edge->setVertex(1, pose); 255 edge->setMeasurement(Eigen::Vector2d(p.x, p.y)); 256 edge->setParameterId(0, 0); 257 edge->setInformation(Eigen::Matrix2d::Identity()); 258 optimizer.addEdge(edge); 259 index++; 260 } 261 262 chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); 263 optimizer.setVerbose(true); 264 optimizer.initializeOptimization(); 265 optimizer.optimize(100); 266 chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); 267 chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>> (t2 - t1); 268 cout << "optimization costs time: " << time_used.count() << " seconds." << endl; 269 270 cout << endl << "after optimization:" << endl; 271 cout << "T=" << endl << Eigen::Isometry3d(pose->estimate()).matrix() << endl; 272 }
这里我们只关心运动,不关心结构。换句话说,只要通过特征点成功求出了运动,我们就不再需要这帧的特征点了。这种做法当然会有缺陷,但是忽略掉数量庞大的特征点可以节省许多的计算量。然后,在 t 到 t + 1 时刻,我们又以 t 时刻为参考帧,考虑 t 到 t + 1 间的运动关系。如此往复,就得到了一条运动轨迹。