需要获取更好阅读体验的同学,请访问我专门设立的站点查看,地址:http://rtos.100ask.net/
系列教程总目录
本教程连载中,篇章会比较多,为方便同学们阅读,点击这里可以查看文章的 目录列表,目录列表页面地址:https://blog.csdn.net/thisway_diy/article/details/121399484
概述
在本章中,会涉及如下内容:
- FreeRTOS如何给每个任务分配CPU时间
- 如何选择某个任务来运行
- 任务优先级如何起作用
- 任务有哪些状态
- 如何实现任务
- 如何使用任务参数
- 怎么修改任务优先级
- 怎么删除任务
- 怎么实现周期性的任务
- 如何使用空闲任务
3.1 基本概念
对于整个单片机程序,我们称之为application,应用程序。
使用FreeRTOS时,我们可以在application中创建多个任务(task),有些文档把任务也称为线程(thread)。

以日常生活为例,比如这个母亲要同时做两件事:
- 喂饭:这是一个任务
- 回信息:这是另一个任务
这可以引入很多概念:
- 任务状态(State):
- 当前正在喂饭,它是running状态;另一个"回信息"的任务就是"not running"状态
- "not running"状态还可以细分:
- ready:就绪,随时可以运行
- blocked:阻塞,卡住了,母亲在等待同事回信息
- suspended:挂起,同事废话太多,不管他了
- 优先级(Priority)
- 我工作生活兼顾:喂饭、回信息优先级一样,轮流做
- 我忙里偷闲:还有空闲任务,休息一下
- 厨房着火了,什么都别说了,先灭火:优先级更高
- 栈(Stack)
- 喂小孩时,我要记得上一口喂了米饭,这口要喂青菜了
- 回信息时,我要记得刚才聊的是啥
- 做不同的任务,这些细节不一样
- 对于人来说,当然是记在脑子里
- 对于程序,是记在栈里
- 每个任务有自己的栈
- 事件驱动
- 孩子吃饭太慢:先休息一会,等他咽下去了、等他提醒我了,再喂下一口
- 协助式调度(Co-operative Scheduling)
- 你在给同事回信息
- 同事说:好了,你先去给小孩喂一口饭吧,你才能离开
- 同事不放你走,即使孩子哭了你也不能走
- 你好不容易可以给孩子喂饭了
- 孩子说:好了,妈妈你去处理一下工作吧,你才能离开
- 孩子不放你走,即使同事连发信息你也不能走
- 你在给同事回信息
这涉及很多概念,后续章节详细分析。
3.2 任务创建与删除
3.2.1 什么是任务
在FreeRTOS中,任务就是一个函数,原型如下:
void ATaskFunction( void *pvParameters );
要注意的是:
- 这个函数不能返回
- 同一个函数,可以用来创建多个任务;换句话说,多个任务可以运行同一个函数
- 函数内部,尽量使用局部变量:
- 每个任务都有自己的栈
- 每个任务运行这个函数时
- 任务A的局部变量放在任务A的栈里、任务B的局部变量放在任务B的栈里
- 不同任务的局部变量,有自己的副本
- 函数使用全局变量、静态变量的话
- 只有一个副本:多个任务使用的是同一个副本
- 要防止冲突(后续会讲)
下面是一个示例:
void ATaskFunction( void *pvParameters )
{
/* 对于不同的任务,局部变量放在任务的栈里,有各自的副本 */
int32_t lVariableExample = 0;
/* 任务函数通常实现为一个无限循环 */
for( ;; )
{
/* 任务的代码 */
}
/* 如果程序从循环中退出,一定要使用vTaskDelete删除自己
* NULL表示删除的是自己
*/
vTaskDelete( NULL );
/* 程序不会执行到这里, 如果执行到这里就出错了 */
}
3.2.2 创建任务
创建任务时使用的函数如下:
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, // 函数指针, 任务函数
const char * const pcName, // 任务的名字
const configSTACK_DEPTH_TYPE usStackDepth, // 栈大小,单位为word,10表示40字节
void * const pvParameters, // 调用任务函数时传入的参数
UBaseType_t uxPriority, // 优先级
TaskHandle_t * const pxCreatedTask ); // 任务句柄, 以后使用它来操作这个任务
参数说明:
| 参数 | 描述 |
|---|---|
| pvTaskCode | 函数指针,可以简单地认为任务就是一个C函数。 它稍微特殊一点:永远不退出,或者退出时要调用"vTaskDelete(NULL)" |
| pcName | 任务的名字,FreeRTOS内部不使用它,仅仅起调试作用。 长度为:configMAX_TASK_NAME_LEN |
| usStackDepth | 每个任务都有自己的栈,这里指定栈大小。 单位是word,比如传入100,表示栈大小为100 word,也就是400字节。 最大值为uint16_t的最大值。 怎么确定栈的大小,并不容易,很多时候是估计。 精确的办法是看反汇编码。 |
| pvParameters | 调用pvTaskCode函数指针时用到:pvTaskCode(pvParameters) |
| uxPriority | 优先级范围:0~(configMAX_PRIORITIES – 1) 数值越小优先级越低, 如果传入过大的值,xTaskCreate会把它调整为(configMAX_PRIORITIES – 1) |
| pxCreatedTask | 用来保存xTaskCreate的输出结果:task handle。 以后如果想操作这个任务,比如修改它的优先级,就需要这个handle。 如果不想使用该handle,可以传入NULL。 |
| 返回值 | 成功:pdPASS; 失败:errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY(失败原因只有内存不足) 注意:文档里都说失败时返回值是pdFAIL,这不对。 pdFAIL是0,errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY是-1。 |
3.2.3 示例1: 创建任务
代码为:FreeRTOS_01_create_task
使用2个函数分别创建2个任务。
任务1的代码:
void vTask1( void *pvParameters )
{
const char *pcTaskName = "T1 run\r\n";
volatile uint32_t ul; /* volatile用来避免被优化掉 */
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
/* 打印任务1的信息 */
printf( pcTaskName );
/* 延迟一会(比较简单粗暴) */
for( ul = 0; ul < mainDELAY_LOOP_COUNT; ul++ )
{
}
}
}
任务2的代码:
void vTask2( void *pvParameters )
{
const char *pcTaskName = "T2 run\r\n";
volatile uint32_t ul; /* volatile用来避免被优化掉 */
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
/* 打印任务1的信息 */
printf( pcTaskName );
/* 延迟一会(比较简单粗暴) */
for( ul = 0; ul < mainDELAY_LOOP_COUNT; ul++ )
{
}
}
}
main函数:
int main( void )
{
prvSetupHardware();
xTaskCreate(vTask1, "Task 1", 1000, NULL, 1, NULL);
xTaskCreate(vTask2, "Task 2", 1000, NULL, 1, NULL);
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
运行结果如下:

注意:
- task 2先运行!
- 要分析xTaskCreate的代码才能知道原因:更高优先级的、或者后面创建的任务先运行。
任务运行图:
- 在t1:Task2进入运行态,一直运行直到t2
- 在t2:Task1进入运行态,一直运行直到t3;在t3,Task2重新进入运行态

3.2.4 示例2: 使用任务参数
代码为:FreeRTOS_02_create_task_use_params
我们说过,多个任务可以使用同一个函数,怎么体现它们的差别?
- 栈不同
- 创建任务时可以传入不同的参数
我们创建2个任务,使用同一个函数,代码如下:
void vTaskFunction( void *pvParameters )
{
const char *pcTaskText = pvParameters;
volatile uint32_t ul; /* volatile用来避免被优化掉 */
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
/* 打印任务的信息 */
printf(pcTaskText);
/* 延迟一会(比较简单粗暴) */
for( ul = 0; ul < mainDELAY_LOOP_COUNT; ul++ )
{
}
}
}
上述代码中的pcTaskText来自参数pvParameters,pvParameters来自哪里?创建任务时传入的。
代码如下:
- 使用xTaskCreate创建2个任务时,第4个参数就是pvParameters
- 不同的任务,pvParameters不一样
static const char *pcTextForTask1 = "T1 run\r\n";
static const char *pcTextForTask2 = "T2 run\r\n";
int main( void )
{
prvSetupHardware();
xTaskCreate(vTaskFunction, "Task 1", 1000, (void *)pcTextForTask1, 1, NULL);
xTaskCreate(vTaskFunction, "Task 2", 1000, (void *)pcTextForTask2, 1, NULL);
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
3.2.5 任务的删除
删除任务时使用的函数如下:
void vTaskDelete( TaskHandle_t xTaskToDelete );
参数说明:
| 参数 | 描述 |
|---|---|
| pvTaskCode | 任务句柄,使用xTaskCreate创建任务时可以得到一个句柄。 也可传入NULL,这表示删除自己。 |
怎么删除任务?举个不好的例子:
- 自杀:
vTaskDelete(NULL) - 被杀:别的任务执行
vTaskDelete(pvTaskCode),pvTaskCode是自己的句柄 - 杀人:执行
vTaskDelete(pvTaskCode),pvTaskCode是别的任务的句柄
3.2.6 示例3: 删除任务
代码为:FreeRTOS_03_delete_task
本节代码会涉及优先级的知识,可以只看vTaskDelete的用法,忽略优先级的讲解。
我们要做这些事情:
- 创建任务1:任务1的大循环里,创建任务2,然后休眠一段时间
- 任务2:打印一句话,然后就删除自己
任务1的代码如下:
void vTask1( void *pvParameters )
{
const TickType_t xDelay100ms = pdMS_TO_TICKS( 100UL );
BaseType_t ret;
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
/* 打印任务的信息 */
printf("Task1 is running\r\n");
ret = xTaskCreate( vTask2, "Task 2", 1000, NULL, 2, &xTask2Handle );
if (ret != pdPASS)
printf("Create Task2 Failed\r\n");
// 如果不休眠的话, Idle任务无法得到执行
// Idel任务会清理任务2使用的内存
// 如果不休眠则Idle任务无法执行, 最后内存耗尽
vTaskDelay( xDelay100ms );
}
任务2的代码如下:
void vTask2( void *pvParameters )
{
/* 打印任务的信息 */
printf("Task2 is running and about to delete itself\r\n");
// 可以直接传入参数NULL, 这里只是为了演示函数用法
vTaskDelete(xTask2Handle);
}
main函数代码如下:
int main( void )
{
prvSetupHardware();
xTaskCreate(vTask1, "Task 1", 1000, NULL, 1, NULL);
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
运行结果如下:

任务运行图:
- main函数中创建任务1,优先级为1。任务1运行时,它创建任务2,任务2的优先级是2。
- 任务2的优先级最高,它马上执行。
- 任务2打印一句话后,就删除了自己。
- 任务2被删除后,任务1的优先级最高,轮到任务1继续运行,它调用
vTaskDelay()进入Block状态 - 任务1 Block期间,轮到Idle任务执行:它释放任务2的内存(TCB、栈)
- 时间到后,任务1变为最高优先级的任务继续执行。
- 如此循环。

在任务1的函数中,如果不调用vTaskDelay,则Idle任务用于没有机会执行,它就无法释放创建任务2是分配的内存。
而任务1在不断地创建任务,不断地消耗内存,最终内存耗尽再也无法创建新的任务。
现象如下:

任务1的代码中,需要注意的是:xTaskCreate的返回值。
- 很多手册里说它失败时返回值是pdFAIL,这个宏是0
- 其实失败时返回值是errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY,这个宏是-1
- 为了避免混淆,我们使用返回值跟pdPASS来比较,这个宏是1
3.3 任务优先级和Tick
3.3.1 任务优先级
在上个示例中我们体验过优先级的使用:高优先级的任务先运行。
优先级的取值范围是:0~(configMAX_PRIORITIES – 1),数值越大优先级越高。
FreeRTOS的调度器可以使用2种方法来快速找出优先级最高的、可以运行的任务。使用不同的方法时,configMAX_PRIORITIES 的取值有所不同。
- 通用方法
使用C函数实现,对所有的架构都是同样的代码。对configMAX_PRIORITIES的取值没有限制。但是configMAX_PRIORITIES的取值还是尽量小,因为取值越大越浪费内存,也浪费时间。
configUSE_PORT_OPTIMISED_TASK_SELECTION被定义为0、或者未定义时,使用此方法。 - 架构相关的优化的方法
架构相关的汇编指令,可以从一个32位的数里快速地找出为1的最高位。使用这些指令,可以快速找出优先级最高的、可以运行的任务。
使用这种方法时,configMAX_PRIORITIES的取值不能超过32。
configUSE_PORT_OPTIMISED_TASK_SELECTION被定义为1时,使用此方法。
在学习调度方法之前,你只要初略地知道:
- FreeRTOS会确保最高优先级的、可运行的任务,马上就能执行
- 对于相同优先级的、可运行的任务,轮流执行
这无需记忆,就像我们举的例子:
- 厨房着火了,当然优先灭火
- 喂饭、回复信息同样重要,轮流做
3.3.2 Tick
对于同优先级的任务,它们“轮流”执行。怎么轮流?你执行一会,我执行一会。
"一会"怎么定义?
人有心跳,心跳间隔基本恒定。
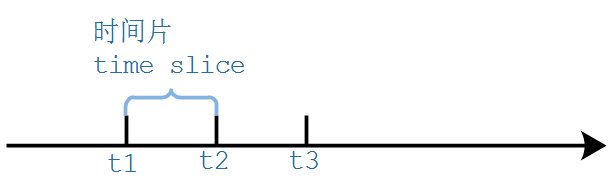
FreeRTOS中也有心跳,它使用定时器产生固定间隔的中断。这叫Tick、滴答,比如每10ms发生一次时钟中断。
如下图:
- 假设t1、t2、t3发生时钟中断
- 两次中断之间的时间被称为时间片(time slice、tick period)
- 时间片的长度由configTICK_RATE_HZ 决定,假设configTICK_RATE_HZ为100,那么时间片长度就是10ms
相同优先级的任务怎么切换呢?请看下图:
- 任务2从t1执行到t2
- 在t2发生tick中断,进入tick中断处理函数:
- 选择下一个要运行的任务
- 执行完中断处理函数后,切换到新的任务:任务1
- 任务1从t2执行到t3
- 从下图中可以看出,任务运行的时间并不是严格从t1,t2,t3哪里开始

有了Tick的概念后,我们就可以使用Tick来衡量时间了,比如:
vTaskDelay(2); // 等待2个Tick,假设configTICK_RATE_HZ=100, Tick周期时10ms, 等待20ms
// 还可以使用pdMS_TO_TICKS宏把ms转换为tick
vTaskDelay(pdMS_TO_TICKS(100)); // 等待100ms
注意,基于Tick实现的延时并不精确,比如vTaskDelay(2)的本意是延迟2个Tick周期,有可能经过1个Tick多一点就返回了。
如下图:
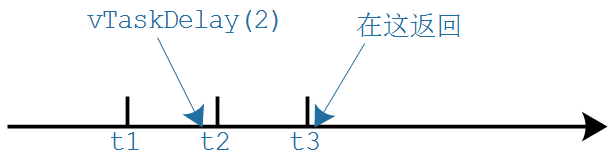
使用vTaskDelay函数时,建议以ms为单位,使用pdMS_TO_TICKS把时间转换为Tick。
这样的代码就与configTICK_RATE_HZ无关,即使配置项configTICK_RATE_HZ改变了,我们也不用去修改代码。
3.3.3 示例4: 优先级实验
代码为:FreeRTOS_04_task_priority
本程序会创建3个任务:
- 任务1、任务2:优先级相同,都是1
- 任务3:优先级最高,是2
任务1、2代码如下:
void vTask1( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
/* 打印任务的信息 */
printf("T1\r\n");
}
}
void vTask2( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
/* 打印任务的信息 */
printf("T2\r\n");
}
}
任务3代码如下:
void vTask3( void *pvParameters )
{
const TickType_t xDelay3000ms = pdMS_TO_TICKS( 3000UL );
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
/* 打印任务的信息 */
printf("T3\r\n");
// 如果不休眠的话, 其他任务无法得到执行
vTaskDelay( xDelay3000ms );
}
}
main函数代码如下:
{
prvSetupHardware();
xTaskCreate(vTask1, "Task 1", 1000, NULL, 1, NULL);
xTaskCreate(vTask2, "Task 2", 1000, NULL, 1, NULL);
xTaskCreate(vTask3, "Task 3", 1000, NULL, 2, NULL);
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
运行情况如下图所示:
- 任务3优先执行,直到它调用vTaskDelay主动放弃运行
- 任务1、任务2:轮流执行
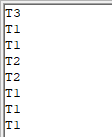
调度情况如下图所示:

3.3.4 示例5: 修改优先级
本节代码为:FreeRTOS_05_change_priority。
使用uxTaskPriorityGet来获得任务的优先级:
UBaseType_t uxTaskPriorityGet( const TaskHandle_t xTask );
使用参数xTask来指定任务,设置为NULL表示获取自己的优先级。
使用vTaskPrioritySet 来设置任务的优先级:
void vTaskPrioritySet( TaskHandle_t xTask,
UBaseType_t uxNewPriority );
使用参数xTask来指定任务,设置为NULL表示设置自己的优先级;
参数uxNewPriority表示新的优先级,取值范围是0~(configMAX_PRIORITIES – 1)。
main函数的代码如下,它创建了2个任务:任务1的优先级更高,它先执行:
int main( void )
{
prvSetupHardware();
/* Task1的优先级更高, Task1先执行 */
xTaskCreate( vTask1, "Task 1", 1000, NULL, 2, NULL );
xTaskCreate( vTask2, "Task 2", 1000, NULL, 1, &xTask2Handle );
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
任务1的代码如下:
void vTask1( void *pvParameters )
{
UBaseType_t uxPriority;
/* Task1,Task2都不会进入阻塞或者暂停状态
* 根据优先级决定谁能运行
*/
/* 得到Task1自己的优先级 */
uxPriority = uxTaskPriorityGet( NULL );
for( ;; )
{
printf( "Task 1 is running\r\n" );
printf("About to raise the Task 2 priority\r\n" );
/* 提升Task2的优先级高于Task1
* Task2会即刻执行
*/
vTaskPrioritySet( xTask2Handle, ( uxPriority + 1 ) );
/* 如果Task1能运行到这里,表示它的优先级比Task2高
* 那就表示Task2肯定把自己的优先级降低了
*/
}
}
任务2的代码如下:
void vTask2( void *pvParameters )
{
UBaseType_t uxPriority;
/* Task1,Task2都不会进入阻塞或者暂停状态
* 根据优先级决定谁能运行
*/
/* 得到Task2自己的优先级 */
uxPriority = uxTaskPriorityGet( NULL );
for( ;; )
{
/* 能运行到这里表示Task2的优先级高于Task1
* Task1提高了Task2的优先级
*/
printf( "Task 2 is running\r\n" );
printf( "About to lower the Task 2 priority\r\n" );
/* 降低Task2自己的优先级,让它小于Task1
* Task1得以运行
*/
vTaskPrioritySet( NULL, ( uxPriority - 2 ) );
}
}
调度情况如下图所示:
- 1:一开始Task1优先级最高,它先执行。它提升了Task2的优先级。
- 2:Task2的优先级最高,它执行。它把自己的优先级降低了。
- 3:Task1的优先级最高,再次执行。它提升了Task2的优先级。
- 如此循环。
- 注意:Task1的优先级一直是2,Task2的优先级是3或1,都大于0。所以Idel任务没有机会执行。

3.4 任务状态
以前我们很简单地把任务的状态分为2中:运行(Runing)、非运行(Not Running)。
对于非运行的状态,还可以继续细分,比如前面的FreeRTOS_04_task_priority中:
- Task3执行vTaskDelay后:处于非运行状态,要过3秒种才能再次运行
- Task3运行期间,Task1、Task2也处于非运行状态,但是它们随时可以运行
- 这两种"非运行"状态就不一样,可以细分为:
- 阻塞状态(Blocked)
- 暂停状态(Suspended)
- 就绪状态(Ready)
3.4.1 阻塞状态(Blocked)
在日常生活的例子中,母亲在电脑前跟同事沟通时,如果同事一直没回复,那么母亲的工作就被卡住了、被堵住了、处于阻塞状态(Blocked)。重点在于:母亲在等待。
在FreeRTOS_04_task_priority实验中,如果把任务3中的vTaskDelay调用注释掉,那么任务1、任务2根本没有执行的机会,任务1、任务2被"饿死"了(starve)。
在实际产品中,我们不会让一个任务一直运行,而是使用"事件驱动"的方法让它运行:
- 任务要等待某个事件,事件发生后它才能运行
- 在等待事件过程中,它不消耗CPU资源
- 在等待事件的过程中,这个任务就处于阻塞状态(Blocked)
在阻塞状态的任务,它可以等待两种类型的事件:
- 时间相关的事件
- 可以等待一段时间:我等2分钟
- 也可以一直等待,直到某个绝对时间:我等到下午3点
- 同步事件:这事件由别的任务,或者是中断程序产生
- 例子1:任务A等待任务B给它发送数据
- 例子2:任务A等待用户按下按键
- 同步事件的来源有很多(这些概念在后面会细讲):
- 队列(queue)
- 二进制信号量(binary semaphores)
- 计数信号量(counting semaphores)
- 互斥量(mutexes)
- 递归互斥量、递归锁(recursive mutexes)
- 事件组(event groups)
- 任务通知(task notifications)
在等待一个同步事件时,可以加上超时时间。比如等待队里数据,超时时间设为10ms:
- 10ms之内有数据到来:成功返回
- 10ms到了,还是没有数据:超时返回
3.4.2 暂停状态(Suspended)
在日常生活的例子中,母亲正在电脑前跟同事沟通,母亲可以暂停:
- 好烦啊,我暂停一会
- 领导说:你暂停一下
FreeRTOS中的任务也可以进入暂停状态,唯一的方法是通过vTaskSuspend函数。函数原型如下:
void vTaskSuspend( TaskHandle_t xTaskToSuspend );
参数xTaskToSuspend表示要暂停的任务,如果为NULL,表示暂停自己。
要退出暂停状态,只能由别人来操作:
- 别的任务调用:vTaskResume
- 中断程序调用:xTaskResumeFromISR
实际开发中,暂停状态用得不多。
3.4.3 就绪状态(Ready)
这个任务完全准备好了,随时可以运行:只是还轮不到它。这时,它就处于就绪态(Ready)。
3.4.4 完整的状态转换图

3.5 Delay函数
3.5.1 两个Delay函数
有两个Delay函数:
- vTaskDelay:至少等待指定个数的Tick Interrupt才能变为就绪状态
- vTaskDelayUntil:等待到指定的绝对时刻,才能变为就绪态。
这2个函数原型如下:
void vTaskDelay( const TickType_t xTicksToDelay ); /* xTicksToDelay: 等待多少给Tick */
/* pxPreviousWakeTime: 上一次被唤醒的时间
* xTimeIncrement: 要阻塞到(pxPreviousWakeTime + xTimeIncrement)
* 单位都是Tick Count
*/
BaseType_t xTaskDelayUntil( TickType_t * const pxPreviousWakeTime,
const TickType_t xTimeIncrement );
下面画图说明:
- 使用vTaskDelay(n)时,进入、退出vTaskDelay的时间间隔至少是n个Tick中断
- 使用xTaskDelayUntil(&Pre, n)时,前后两次退出xTaskDelayUntil的时间至少是n个Tick中断
- 退出xTaskDelayUntil时任务就进入的就绪状态,一般都能得到执行机会
- 所以可以使用xTaskDelayUntil来让任务周期性地运行

3.5.2 示例6: Delay
本节代码为:FreeRTOS_06_taskdelay。
本程序会创建2个任务:
- Task1:
- 高优先级
- 设置变量flag为1,然后调用
vTaskDelay(xDelay50ms);或vTaskDelayUntil(&xLastWakeTime, xDelay50ms);
- Task2:
- 低优先级
- 设置变量flag为0
main函数代码如下:
int main( void )
{
prvSetupHardware();
/* Task1的优先级更高, Task1先执行 */
xTaskCreate( vTask1, "Task 1", 1000, NULL, 2, NULL );
xTaskCreate( vTask2, "Task 2", 1000, NULL, 1, NULL );
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
Task1的代码中使用条件开关来选择Delay函数,把#if 1改为#if 0就可以使用vTaskDelayUntil,代码如下:
void vTask1( void *pvParameters )
{
const TickType_t xDelay50ms = pdMS_TO_TICKS( 50UL );
TickType_t xLastWakeTime;
int i;
/* 获得当前的Tick Count */
xLastWakeTime = xTaskGetTickCount();
for( ;; )
{
flag = 1;
/* 故意加入多个循环,让程序运行时间长一点 */
for (i = 0; i <5; i++)
printf( "Task 1 is running\r\n" );
#if 1
vTaskDelay(xDelay50ms);
#else
vTaskDelayUntil(&xLastWakeTime, xDelay50ms);
#endif
}
}
Task2的代码如下:
void vTask2( void *pvParameters )
{
for( ;; )
{
flag = 0;
printf( "Task 2 is running\r\n" );
}
}
使用Keil的逻辑分析观察flag变量的bit波形,如下:
- flag为1时表示Task1在运行,flag为0时表示Task2在运行,也就是Task1处于阻塞状态
- vTaskDelay:指定的是阻塞的时间
- vTaskDelayUntil:指定的是任务执行的间隔、周期

3.6 空闲任务及其钩子函数
3.6.1 介绍
在FreeRTOS_03_delete_task的实验里,我们体验过空闲任务(Idle任务)的作用:释放被删除的任务的内存。
除了上述目的之外,为什么必须要有空闲任务?一个良好的程序,它的任务都是事件驱动的:平时大部分时间处于阻塞状态。有可能我们自己创建的所有任务都无法执行,但是调度器必须能找到一个可以运行的任务:所以,我们要提供空闲任务。在使用vTaskStartScheduler() 函数来创建、启动调度器时,这个函数内部会创建空闲任务:
- 空闲任务优先级为0:它不能阻碍用户任务运行
- 空闲任务要么处于就绪态,要么处于运行态,永远不会阻塞
空闲任务的优先级为0,这意味着一旦某个用户的任务变为就绪态,那么空闲任务马上被切换出去,让这个用户任务运行。在这种情况下,我们说用户任务"抢占"(pre-empt)了空闲任务,这是由调度器实现的。
要注意的是:如果使用vTaskDelete() 来删除任务,那么你就要确保空闲任务有机会执行,否则就无法释放被删除任务的内存。
我们可以添加一个空闲任务的钩子函数(Idle Task Hook Functions),空闲任务的循环每执行一次,就会调用一次钩子函数。钩子函数的作用有这些:
- 执行一些低优先级的、后台的、需要连续执行的函数
- 测量系统的空闲时间:空闲任务能被执行就意味着所有的高优先级任务都停止了,所以测量空闲任务占据的时间,就可以算出处理器占用率。
- 让系统进入省电模式:空闲任务能被执行就意味着没有重要的事情要做,当然可以进入省电模式了。
空闲任务的钩子函数的限制:
- 不能导致空闲任务进入阻塞状态、暂停状态
- 如果你会使用
vTaskDelete()来删除任务,那么钩子函数要非常高效地执行。如果空闲任务移植卡在钩子函数里的话,它就无法释放内存。
3.6.2 使用钩子函数的前提
在FreeRTOS\Source\tasks.c中,可以看到如下代码,所以前提就是:
- 把这个宏定义为1:configUSE_IDLE_HOOK
- 实现
vApplicationIdleHook函数

3.7 调度算法
3.7.1 重要概念
这些知识在前面都提到过了,这里总结一下。
正在运行的任务,被称为"正在使用处理器",它处于运行状态。在单处理系统中,任何时间里只能有一个任务处于运行状态。
非运行状态的任务,它处于这3中状态之一:阻塞(Blocked)、暂停(Suspended)、就绪(Ready)。就绪态的任务,可以被调度器挑选出来切换为运行状态,调度器永远都是挑选最高优先级的就绪态任务并让它进入运行状态。
阻塞状态的任务,它在等待"事件",当事件发生时任务就会进入就绪状态。事件分为两类:时间相关的事件、同步事件。所谓时间相关的事件,就是设置超时时间:在指定时间内阻塞,时间到了就进入就绪状态。使用时间相关的事件,可以实现周期性的功能、可以实现超时功能。同步事件就是:某个任务在等待某些信息,别的任务或者中断服务程序会给它发送信息。怎么"发送信息"?方法很多,有:任务通知(task notification)、队列(queue)、事件组(event group)、信号量(semaphoe)、互斥量(mutex)等。这些方法用来发送同步信息,比如表示某个外设得到了数据。
3.7.2 配置调度算法
所谓调度算法,就是怎么确定哪个就绪态的任务可以切换为运行状态。
通过配置文件FreeRTOSConfig.h的两个配置项来配置调度算法:configUSE_PREEMPTION、configUSE_TIME_SLICING。
还有第三个配置项:configUSE_TICKLESS_IDLE,它是一个高级选项,用于关闭Tick中断来实现省电,后续单独讲解。现在我们假设configUSE_TICKLESS_IDLE被设为0,先不使用这个功能。
调度算法的行为主要体现在两方面:高优先级的任务先运行、同优先级的就绪态任务如何被选中。调度算法要确保同优先级的就绪态任务,能"轮流"运行,策略是"轮转调度"(Round Robin Scheduling)。轮转调度并不保证任务的运行时间是公平分配的,我们还可以细化时间的分配方法。
从3个角度统一理解多种调度算法:
-
可否抢占?高优先级的任务能否优先执行(配置项: configUSE_PREEMPTION)
- 可以:被称作"可抢占调度"(Pre-emptive),高优先级的就绪任务马上执行,下面再细化。
- 不可以:不能抢就只能协商了,被称作"合作调度模式"(Co-operative Scheduling)
- 当前任务执行时,更高优先级的任务就绪了也不能马上运行,只能等待当前任务主动让出CPU资源。
- 其他同优先级的任务也只能等待:更高优先级的任务都不能抢占,平级的更应该老实点
-
可抢占的前提下,同优先级的任务是否轮流执行(配置项:configUSE_TIME_SLICING)
- 轮流执行:被称为"时间片轮转"(Time Slicing),同优先级的任务轮流执行,你执行一个时间片、我再执行一个时间片
- 不轮流执行:英文为"without Time Slicing",当前任务会一直执行,直到主动放弃、或者被高优先级任务抢占
-
在"可抢占"+"时间片轮转"的前提下,进一步细化:空闲任务是否让步于用户任务(配置项:configIDLE_SHOULD_YIELD)
- 空闲任务低人一等,每执行一次循环,就看看是否主动让位给用户任务
- 空闲任务跟用户任务一样,大家轮流执行,没有谁更特殊
列表如下:
| 配置项 | A | B | C | D | E |
|---|---|---|---|---|---|
| configUSE_PREEMPTION | 1 | 1 | 1 | 1 | 0 |
| configUSE_TIME_SLICING | 1 | 1 | 0 | 0 | x |
| configIDLE_SHOULD_YIELD | 1 | 0 | 1 | 0 | x |
| 说明 | 常用 | 很少用 | 很少用 | 很少用 | 几乎不用 |
注:
- A:可抢占+时间片轮转+空闲任务让步
- B:可抢占+时间片轮转+空闲任务不让步
- C:可抢占+非时间片轮转+空闲任务让步
- D:可抢占+非时间片轮转+空闲任务不让步
- E:合作调度
3.7.3 示例7: 调度
本节代码为:FreeRTOS_07_scheduler。后续的实验都是基于这个程序,通过修改配置项来观察效果。
代码里创建了3个任务:Task1、Task2的优先级都是0,跟空闲任务一样,Task3优先级最高为2。程序里定义了4个全局变量,当某个的任务执行时,对应的变量就被设为1,可以通过Keil的逻辑分析仪查看任务切换情况:
static volatile int flagIdleTaskrun = 0; // 空闲任务运行时flagIdleTaskrun=1
static volatile int flagTask1run = 0; // 任务1运行时flagTask1run=1
static volatile int flagTask2run = 0; // 任务2运行时flagTask2run=1
static volatile int flagTask3run = 0; // 任务3运行时flagTask3run=1
main函数代码如下:
int main( void )
{
prvSetupHardware();
xTaskCreate(vTask1, "Task 1", 1000, NULL, 0, NULL);
xTaskCreate(vTask2, "Task 2", 1000, NULL, 0, NULL);
xTaskCreate(vTask3, "Task 3", 1000, NULL, 2, NULL);
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
任务1、任务2代码如下,它们是"连续任务"(continuous task):
void vTask1( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 1;
flagTask2run = 0;
flagTask3run = 0;
/* 打印任务的信息 */
printf("T1\r\n");
}
}
void vTask2( void *pvParameters )
{
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 1;
flagTask3run = 0;
/* 打印任务的信息 */
printf("T2\r\n");
}
}
任务3代码如下,它会调用vTaskDelay,这样别的任务才可以运行:
void vTask3( void *pvParameters )
{
const TickType_t xDelay5ms = pdMS_TO_TICKS( 5UL );
/* 任务函数的主体一般都是无限循环 */
for( ;; )
{
flagIdleTaskrun = 0;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 1;
/* 打印任务的信息 */
printf("T3\r\n");
// 如果不休眠的话, 其他任务无法得到执行
vTaskDelay( xDelay5ms );
}
}
提供了一个空闲任务的钩子函数:
void vApplicationIdleHook(void)
{
flagIdleTaskrun = 1;
flagTask1run = 0;
flagTask2run = 0;
flagTask3run = 0;
/* 故意加入打印让flagIdleTaskrun变为1的时间维持长一点 */
printf("Id\r\n");
}
3.7.4 对比效果: 抢占与否
在FreeRTOSConfig.h中,定义这样的宏,对比逻辑分析仪的效果:
// 实验1:抢占
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 1
#define configIDLE_SHOULD_YIELD 1
// 实验2:不抢占
#define configUSE_PREEMPTION 0
#define configUSE_TIME_SLICING 1
#define configIDLE_SHOULD_YIELD 1
从下面的对比图可以知道:
- 抢占时:高优先级任务就绪时,就可以马上执行
- 不抢占时:优先级失去意义了,既然不能抢占就只能协商了,图中任务1一直在运行(一点都没有协商精神),其他任务都无法执行。即使任务3的
vTaskDelay已经超时、即使它的优先级更高,都没办法执行。

3.7.5 对比效果: 时间片轮转与否
在FreeRTOSConfig.h中,定义这样的宏,对比逻辑分析仪的效果:
// 实验1:时间片轮转
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 1
#define configIDLE_SHOULD_YIELD 1
// 实验2:时间片不轮转
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 0
#define configIDLE_SHOULD_YIELD 1
从下面的对比图可以知道:
- 时间片轮转:在Tick中断中会引起任务切换
- 时间片不轮转:高优先级任务就绪时会引起任务切换,高优先级任务不再运行时也会引起任务切换。可以看到任务3就绪后可以马上执行,它运行完毕后导致任务切换。其他时间没有任务切换,可以看到任务1、任务2都运行了很长时间。

3.7.6 对比效果: 空闲任务让步
在FreeRTOSConfig.h中,定义这样的宏,对比逻辑分析仪的效果:
// 实验1:空闲任务让步
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 1
#define configIDLE_SHOULD_YIELD 1
// 实验2:空闲任务不让步
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 1
#define configIDLE_SHOULD_YIELD 0
从下面的对比图可以知道:
- 让步时:在空闲任务的每个循环中,会主动让出处理器,从图中可以看到flagIdelTaskrun的波形很小
- 不让步时:空闲任务跟任务1、任务2同等待遇,它们的波形宽度是差不多的
