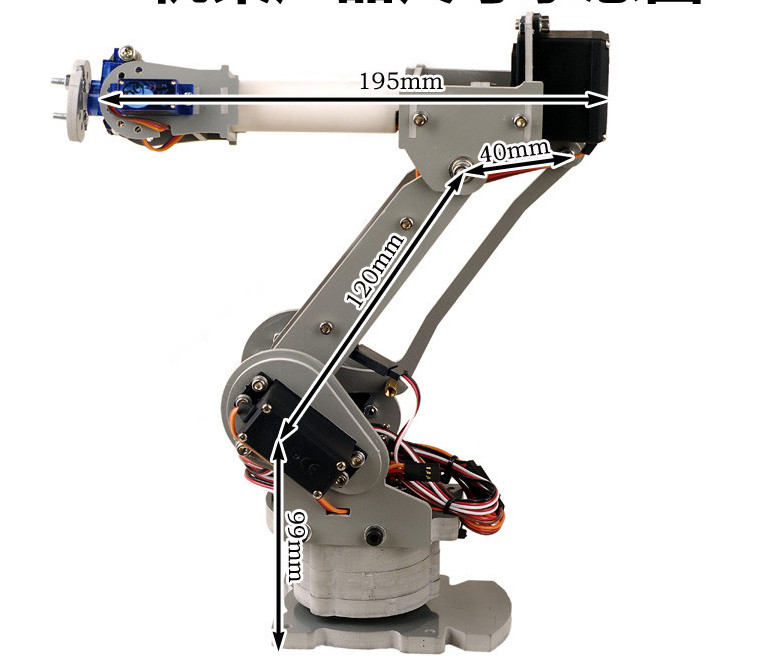
机械臂样子是这样的
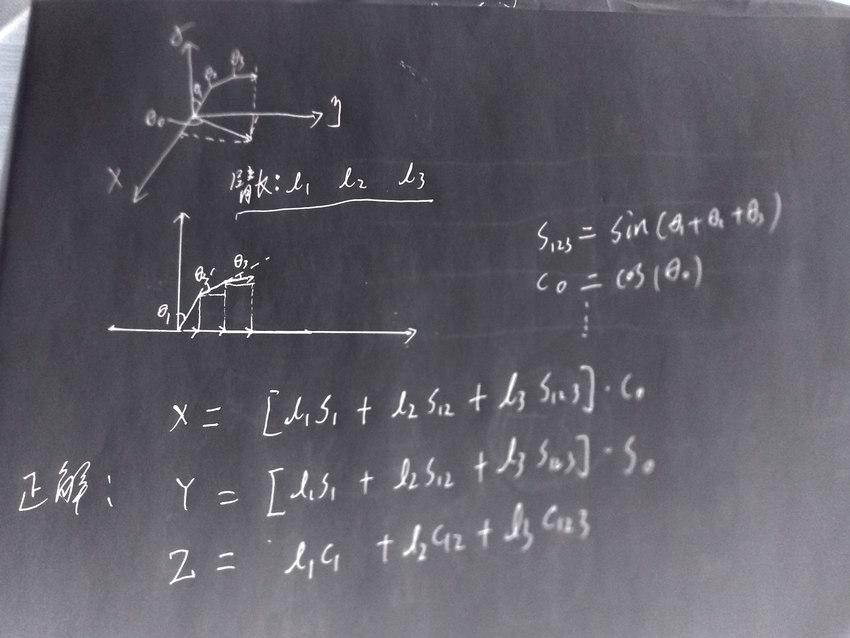
建模
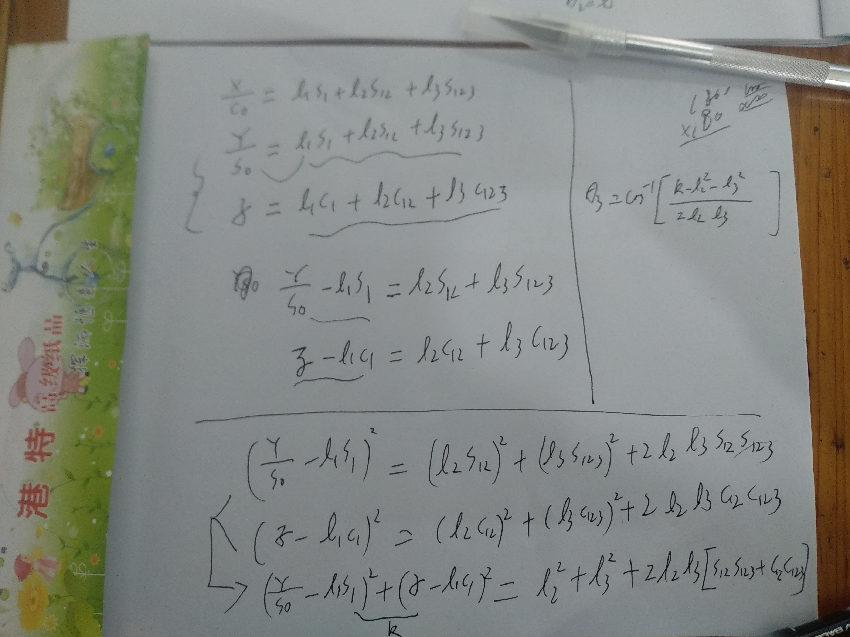
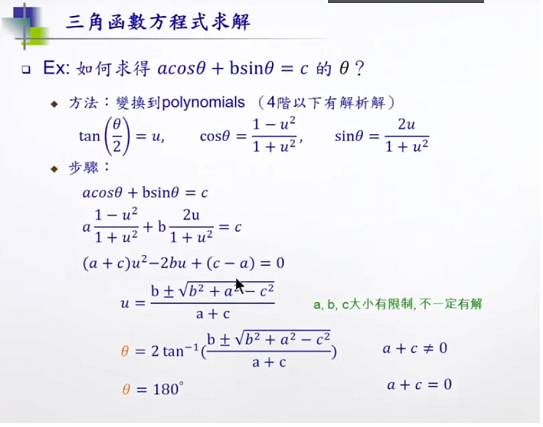
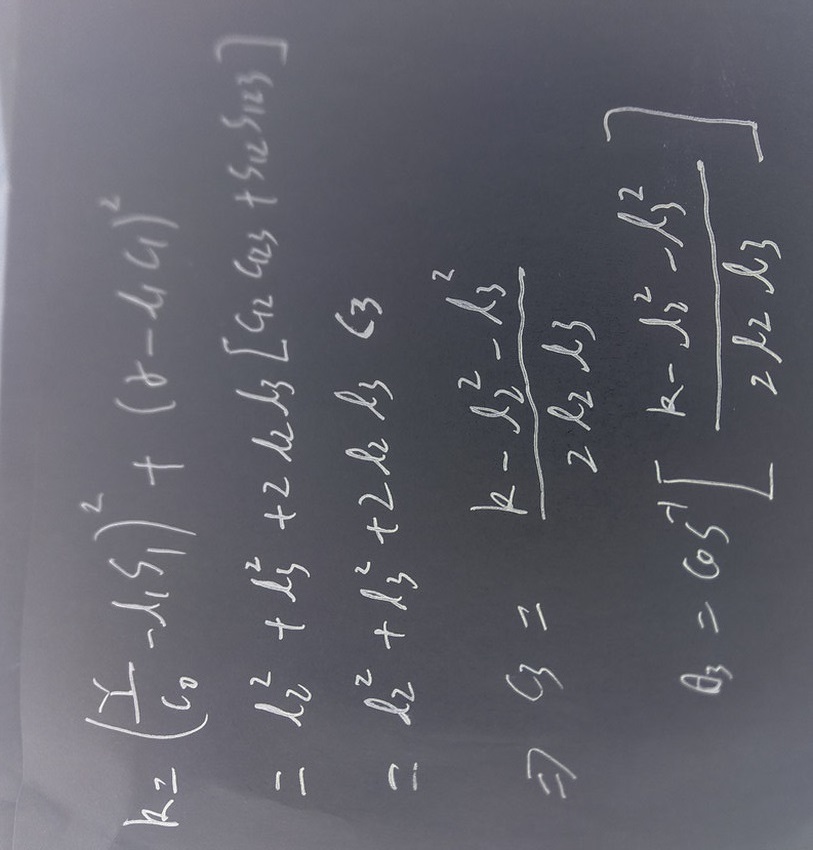
上面是两边同时取平方后,将C12,S123 的平方项消掉,然后 采用二角和差公式(12与3)将1,2角消掉,留下theta3, 这里需要对theta1的0-180度每1度做一次运算
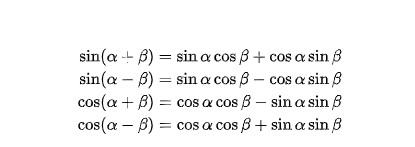
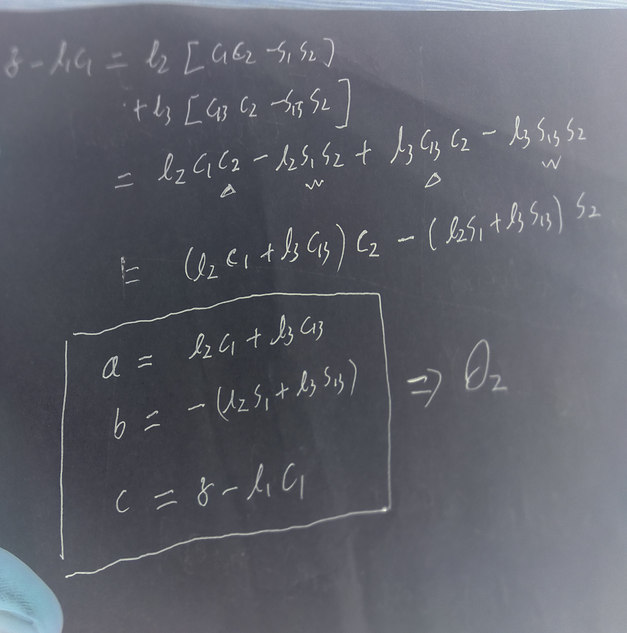
对于theta2,将方程Z=.....采用统一的二角和差化解后得到类似上面的方程
实际的机械臂模型如下图,大臂与小臂角度是有耦合的,但是他们4条边构成的是一个平行四边行(边长固定),所以大小臂的夹角有theta1跟theta2的组合来定
需要考虑theta2的取值范围会随theta1变化而变化,所以对计算出的theta1-theta3要做实际的校验才能执行

参考:https://blog.csdn.net/qq_39777417/article/details/96133017