Videos as Space-Time Region Graphs
ECCV 2018 Xiaolong Wang
2018-08-03 11:16:01
Paper:arXiv
本文利用视频中时空上的 proposal 之间的关系,来进行行为识别的建模。

如上图所示,本文将 video 看做是 a graph of objects,然后在该 graph 上进行行为识别的推理。整体的模型如图 2 所示,该方法将视频连续 5 秒的视频作为输入,传递给 3D-CNN。3D CNN 的输出是一个四维的特征图,维度为:T*H*W*d,其中,T 代表时间维度,H*W 代表了空间维度,d 代表了 channel number。
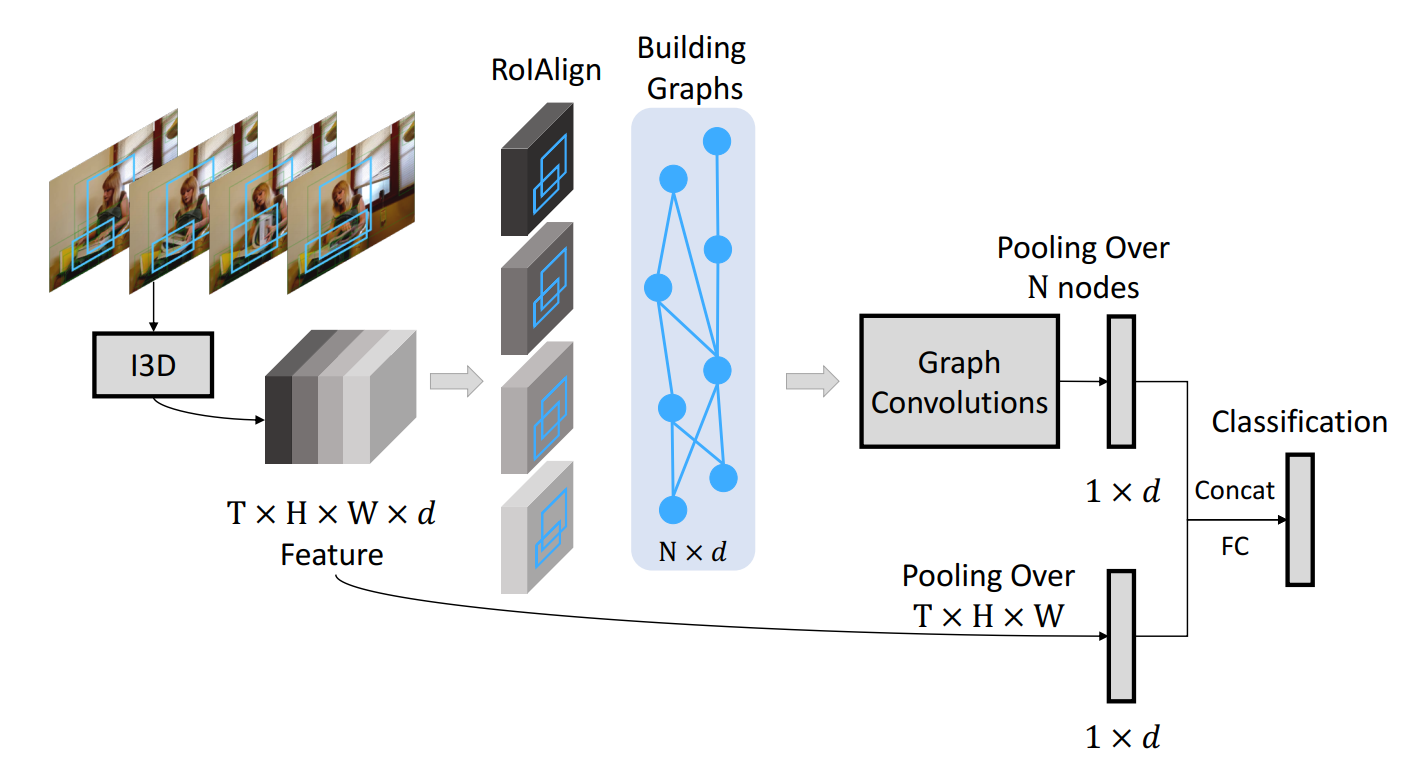
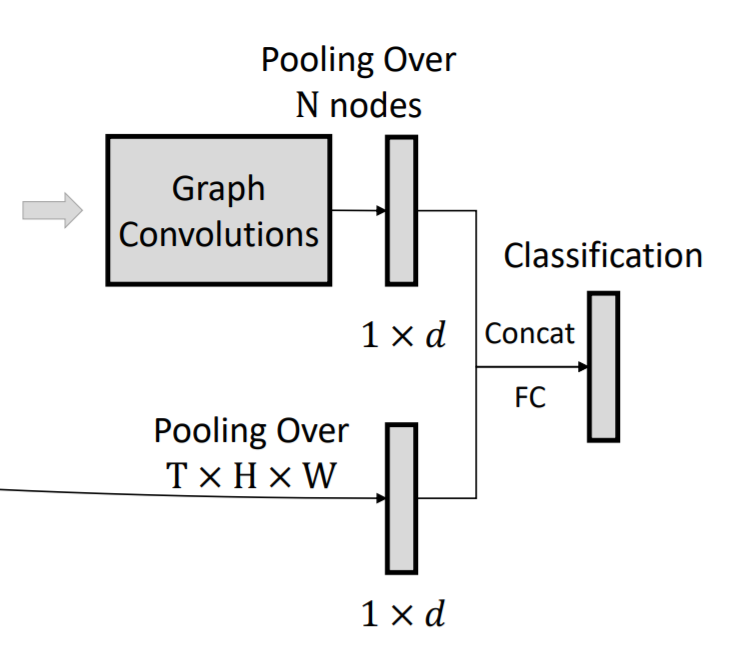
除了提取视频的特征之外,我们采用 RPN 来提取物体的 proposals。给定 T feature frames 的每一个 BBox,我们采用 RoIAlign 来提取每一个 BBox 的 feature。RoIAlign 是独立的在每一个 feature map 上进行特征提取的。有了 graph representations, 我们采用 GCN 来进行推理。我们执行 average pooling 来获取 d-dimensional feature。除了 GCN features,我们也采用 average pooling 来获得 the same d-dimension feature as a global feature。这两个特征被 concatenate 到一起,进行 video level classification。
Graph Representations in Videos:
1). Video representation:
Video Backbone Model:(略)
Region Proposal Network:(略)
2). Similarity Graph:
我们通过在特征空间衡量 objects 之间的相似性,来构建 similarity graph。在这个 graph 当中,我们构建语义上相关的物体对。具体来说,我们会给予下面两种 instances 较高的 edge:
(1)the same object in different states in different video frames ;
(2)highly correlated for recognizing the actions.
注意到:相似的 edges,在任何两对 objects 之间都会进行计算。
正式的来说,假设我们已经有了所有的 object proposals 的 feature,那么,两个 proposal 之间的相似性可以表达为:

其中,这两个函数分别代表了原始 features 的不同转换。特别的,![]() 其中参数 W 和 W' 都是 d * d 维的 weights,并且都是可以通过反向传播进行学习的。通过添加转换权重 W 和 W’,这允许我们不但可以学习到 the correlations between different states of the same object instance across frame,也可以学习到 不同 objects 之间的关系。
其中参数 W 和 W' 都是 d * d 维的 weights,并且都是可以通过反向传播进行学习的。通过添加转换权重 W 和 W’,这允许我们不但可以学习到 the correlations between different states of the same object instance across frame,也可以学习到 不同 objects 之间的关系。
在计算出 affinity matrix 之后,我们在矩阵的每一行执行 normalization,使得:the sum of all the edge values connected to one proposal i will be 1. 我们利用 softmax 来执行这个 normalization:

归一化之后的 G,被认为是 the adjacency matrix 代表 similarity graph。
3). Spatial-Temporal Graph:
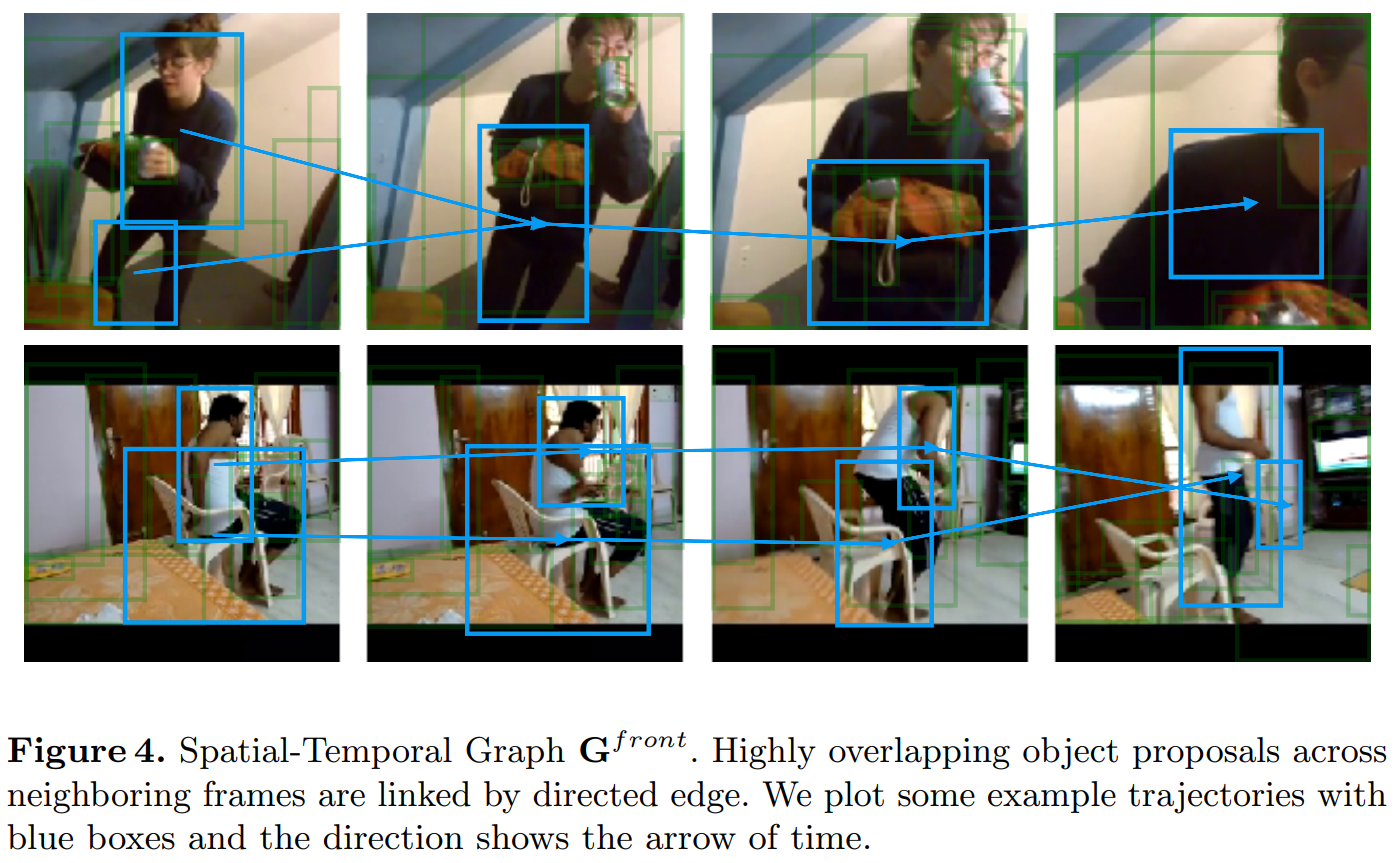
虽然,similarity graph 捕获了 the long term dependencies between any two object proposals,但是它依然没有捕获到 object 和 the ordering of the state change 之间的 the relative spatial relation。为了编码 objects 之间 spatial 和 temporal relations,我们提出利用 spatial-temporal graphs,来将时间和空间位置附近的 proposal 也联系起来。
给定第 t 帧的 object proposals,我们计算 当前 BBox 跟下一帧 BBox 的 IoUs。如果重合度大于 0,那么,我们将这两个 object 用有向边 i -> j 连接起来。在赋予 edge values 之后,我们也对这个 graph 进行归一化:

注意到,这里仅仅是 front 的 graph,作者还构建了 backward 的 graph,以得到更多有有效的结构上的信息。
Convolutions on Graphs:
本文采用 gcn 的图卷积网络:Kipf, T.N., Welling, M.: Semi-supervised classification with graph convolutional networks. In: International Conference on Learning Representations (ICLR). (2017)
为了在 graph 上进行推理,我们采用了 GCN 模型。与传统标准的 convolutional network 不同,他们是在 局部规则的网格数据上进行操作(which operates on a local regular grid),而 graph convolutions 允许我们通过 graph relations,根据其近邻的情况,计算一个 node 的响应(allow us to compute the response of a node based on its neighbors defined by the graph relations)。所以,执行图卷积就等价于执行 graph 内部的信息传递。GCNs 的输出是每一个节点更新之后的 feature,这个 feature 可以被整合起来用于视频分类。正式的,我们将 graph convolutional layer 可以定义为:
Z = GXW, (4)
其中,G 代表近邻 graph (the adjacency graph),维度为:N*N,X 是 graph 中每一个节点的 feature,大小为 N * d,W 是权重矩阵(weight matrix,大小为 d*d)。所以,一个 graph convolutional layer 的输出 Z 仍然是 N * d 维的。而且,这种 graph convolutional layers 可以被堆叠多层。在每一层 GC 之后,在将 Z 正式传输到下一层之前,我们采用两个非线性激活函数(the Layer Normalization and ReLU)。
为了结合 GCNs 的多个 graphs,我们简单的将公式(4)进行拓展,即:

其中,Gi 代表不同种类的 graph,而不同的图,权重是不共享的。但是,作者发现:直接通过公式(5)组合三个 graph($G^{sim}, G^{front}, G^{back}$)缺让精度降低了(相对于 单个 similarity graph 的情况)。
作者分析了原因:我们的 similarity graph $G^{sim}$ 包含需要学习的参数,在更新的时候是需要反向传播的,但是另外两个 graps 是不需要学习的。在每一个 GCN layer 上融合这些 feature,优化起来是非常困难的。所以,我们构建了 GCN 的两个分支,然后仅仅在最后将这两个 GCNs 进行融合。这两支 GCNs 分别进行卷积操作(L layers),卷积的最后一层,叠加起来,行成 N*d 维度的输出。
Video Classification.
作者将 GCNs 的输出和未进行图卷积的特征,进行 concatenate,然后输入给分类器,进行分类,如图所示:
Experiments: