http://www.cnblogs.com/fanzhidongyzby/p/3654855.html
并发问题
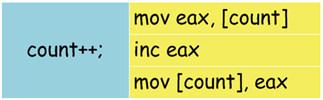
现代操作系统支持多任务的并发,并发在提高计算资源利用率的同时也带来了资源竞争的问题。例如C语言语句“count++;”在未经编译器优化时生成的汇编代码为。
当操作系统内存在多个进程同时执行这段代码时,就可能带来并发问题。

假设count变量初始值为0。进程1执行完“mov eax, [count]”后,寄存器eax内保存了count的值0。此时,进程2被调度执行,抢占了进程1的CPU的控制权。进程2执行“count++;”的汇编代码,将累加后的count值1写回到内存。然后,进程1再次被调度执行,CPU控制权回到进程1。进程1接着执行,计算count的累加值仍为1,写回到内存。虽然进程1和进程2执行了两次“count++;”操作,但是count实际的内存值为1,而不是2!
单处理器原子操作
解决这个问题的方法是,将“count++;”语句翻译为单指令操作。

Intel x86指令集支持内存操作数的inc操作,这样“count++;”操作可以在一条指令内完成。因为进程的上下文切换是在总是在一条指令执行完成后,所以不会出现上述的并发问题。对于单处理器来说,一条处理器指令就是一个原子操作。
多处理器原子操作
但是在多处理器的环境下,例如SMP架构,这个结论不再成立。我们知道“inc [count]”指令的执行过程分为三步:
1)从内存将count的数据读取到cpu。
2)累加读取的值。
3)将修改的值写回count内存。
这又回到前面并发问题类似的情况,只不过此时并发的主题不再是进程,而是处理器。
Intel x86指令集提供了指令前缀lock用于锁定前端串行总线(FSB),保证了指令执行时不会受到其他处理器的干扰。

使用lock指令前缀后,处理器间对count内存的并发访问(读/写)被禁止,从而保证了指令的原子性。

x86原子操作实现
Linux的源码中x86体系结构原子操作的定义文件为。
linux2.6/include/asm-i386/atomic.h
文件内定义了原子类型atomic_t,其仅有一个字段counter,用于保存32位的数据。
typedef struct { volatile int counter; } atomic_t;
其中原子操作函数atomic_inc完成自加原子操作。
/**
* atomic_inc - increment atomic variable
* @v: pointer of type atomic_t
*
* Atomically increments @v by 1.
*/
static __inline__ void atomic_inc(atomic_t *v)
{
__asm__ __volatile__(
LOCK "incl %0"
:"=m" (v->counter)
:"m" (v->counter));
}
其中LOCK宏的定义为。
#ifdef CONFIG_SMP
#define LOCK "lock ; "
#else
#define LOCK ""
#endif
可见,在对称多处理器架构的情况下,LOCK被解释为指令前缀lock。而对于单处理器架构,LOCK不包含任何内容。
arm原子操作实现
在arm的指令集中,不存在指令前缀lock,那如何完成原子操作呢?
Linux的源码中arm体系结构原子操作的定义文件为。
linux2.6/include/asm-arm/atomic.h
其中自加原子操作由函数atomic_add_return实现。
static inline int atomic_add_return(int i, atomic_t *v)
{
unsigned long tmp;
int result;
__asm__ __volatile__("@ atomic_add_return "
"1: ldrex %0, [%2] "
" add %0, %0, %3 "
" strex %1, %0, [%2] "
" teq %1, #0 "
" bne 1b"
: "=&r" (result), "=&r" (tmp)
: "r" (&v->counter), "Ir" (i)
: "cc");
return result;
}
上述嵌入式汇编的实际形式为。
1:
ldrex [result], [v->counter]
add [result], [result], [i]
strex [temp], [result], [v->counter]
teq [temp], #0
bne 1b
ldrex指令将v->counter的值传送到result,并设置全局标记“Exclusive”。
add指令完成“result+i”的操作,并将加法结果保存到result。
strex指令首先检测全局标记“Exclusive”是否存在,如果存在,则将result的值写回counter->v,并将temp置为0,清除“Exclusive”标记,否则直接将temp置为1结束。
teq指令测试temp值是否为0。
bne指令temp不等于0时跳转到标号1,其中字符b表示向后跳转。
整体看来,上述汇编代码一直尝试完成“v->counter+=i”的操作,直到temp为0时结束。
使用ldrex和strex指令对是否可以保证add指令的原子性呢?假设两个进程并发执行“ldrex+add+strex”操作,当进程1执行ldrex后设定了全局标记“Exclusive”。此时切换到进程2,执行ldrex前全局标记“Exclusive”已经设定,ldrex执行后重复设定了该标记。然后执行add和strex指令,完成累加操作。再次切换回进程1,接着执行add指令,当执行strex指令时,由于“Exclusive”标记被进程2清除,因此不执行传送操作,将temp设置为1。后继teq指令测定temp不等于0,则跳转到起始位置重新执行,最终完成累加操作!可见ldrex和strex指令对可以保证进程间的同步。多处理器的情况与此相同,因为arm的原子操作只关心“Exclusive”标记,而不在乎前端串行总线是否加锁。
在ARMv6之前,swp指令就是通过锁定总线的方式完成原子的数据交换,但是影响系统性能。ARMv6之后,一般使用ldrex和strex指令对代替swp指令的功能。
自旋锁中的原子操作
Linux的源码中x86体系结构自旋锁的定义文件为。
linux2.6/include/asm-i386/spinlock.h
其中__raw_spin_lock完成自旋锁的加锁功能
#define __raw_spin_lock_string
" 1: "
"lock ; decb %0 "
"jns 3f "
"2: "
"rep;nop "
"cmpb $0,%0 "
"jle 2b "
"jmp 1b "
"3: "
static inline void __raw_spin_lock(raw_spinlock_t *lock)
{
__asm__ __volatile__(
__raw_spin_lock_string
:"=m" (lock->slock) : : "memory");
}
上述代码的实际汇编形式为。
1:
lock decb [lock->slock]
jns 3
2:
rep nop
cmpb $0, [lock->slock]
jle 2
jmp 1
3:
其中lock->slock字段初始值为1,执行原子操作decb后值为0。符号位为0,执行jns指令跳转到3,完成自旋锁的加锁。
当再次申请自旋锁时,执行原子操作decb后lock->slock值为-1。符号位为1,不执行jns指令。进入标签2,执行一组nop指令后比较lock->slock是否小于等于0,如果小于等于0回到标签2进行循环(自旋)。否则跳转到标签1重新申请自旋锁,直到申请成功。
自旋锁释放时会将lock->slock设置为1,这样保证了其他进程可以获得自旋锁。
信号量中的原子操作
Linux的源码中x86体系结构自旋锁的定义文件为。
linux2.6/include/asm-i386/semaphore.h
信号量的申请操作由函数down实现。
/*
* This is ugly, but we want the default case to fall through.
* "__down_failed" is a special asm handler that calls the C
* routine that actually waits. See arch/i386/kernel/semaphore.c
*/
static inline void down(struct semaphore * sem)
{
might_sleep();
__asm__ __volatile__(
"# atomic down operation "
LOCK "decl %0 " /* --sem->count */
"js 2f "
"1: "
LOCK_SECTION_START("")
"2: lea %0,%%eax "
"call __down_failed "
"jmp 1b "
LOCK_SECTION_END
:"=m" (sem->count)
:
:"memory","ax");
}
实际的汇编代码形式为。
lock decl [sem->count]
js 2
1:
<========== another section ==========>
2:
lea [sem->count], eax
call __down_failed
jmp 1
信号量的sem->count一般初始化为一个正整数,申请信号量时执行原子操作decl,将sem->count减1。如果该值减为负数(符号位为1)则跳转到另一个段内的标签2,否则申请信号量成功。
标签2被编译到另一个段内,进入标签2后,执行lea指令取出sem->count的地址,放到eax寄存器作为参数,然后调用函数__down_failed表示信号量申请失败,进程加入等待队列。最后跳回标签1结束信号量申请。
信号量的释放操作由函数up实现。
/*
* Note! This is subtle. We jump to wake people up only if
* the semaphore was negative (== somebody was waiting on it).
* The default case (no contention) will result in NO
* jumps for both down() and up().
*/
static inline void up(struct semaphore * sem)
{
__asm__ __volatile__(
"# atomic up operation "
LOCK "incl %0 " /* ++sem->count */
"jle 2f "
"1: "
LOCK_SECTION_START("")
"2: lea %0,%%eax "
"call __up_wakeup "
"jmp 1b "
LOCK_SECTION_END
".subsection 0 "
:"=m" (sem->count)
:
:"memory","ax");
}
实际的汇编代码形式为。
lock incl sem->count
jle 2
1:
<========== another section ==========>
2:
lea [sem->count], eax
call __up_wakeup
jmp 1
释放信号量时执行原子操作incl将sem->count加1,如果该值小于等于0,则说明等待队列有阻塞的进程需要唤醒,跳转到标签2,否则信号量释放成功。
标签2被编译到另一个段内,进入标签2后,执行lea指令取出sem->count的地址,放到eax寄存器作为参数,然后调用函数__up_wakeup唤醒等待队列的进程。最后跳回标签1结束信号量释放。
总结
本文通过对操作系统并发问题的讨论研究操作系统内的原子操作的实现原理,并讨论了不同体系结构下Linux原子操作的实现,最后描述了Linux操作系统如何利用原子操作实现常见的进程同步机制,希望对你有所帮助
http://blog.csdn.net/h_armony/article/details/6766505
一、互斥锁
尽管在Posix Thread中同样可以使用IPC的信号量机制来实现互斥锁mutex功能,但显然semphore的功能过于强大了,在Posix Thread中定义了另外一套专门用于线程同步的mutex函数。
1. 创建和销毁
有两种方法创建互斥锁,静态方式和动态方式。
POSIX定义了一个宏PTHREAD_MUTEX_INITIALIZER来静态初始化互斥锁,方法如下: pthread_mutex_t mutex=PTHREAD_MUTEX_INITIALIZER; 在LinuxThreads实现中,pthread_mutex_t是一个结构,而PTHREAD_MUTEX_INITIALIZER则是一个结构常量。
动态方式是采用pthread_mutex_init()函数来初始化互斥锁,API定义如下: int pthread_mutex_init(pthread_mutex_t *mutex, const pthread_mutexattr_t *mutexattr) 其中mutexattr用于指定互斥锁属性(见下),如果为NULL则使用缺省属性。
pthread_mutex_destroy()用于注销一个互斥锁,API定义如下: int pthread_mutex_destroy(pthread_mutex_t *mutex) 销毁一个互斥锁即意味着释放它所占用的资源,且要求锁当前处于开放状态。由于在Linux中,互斥锁并不占用任何资源,因此LinuxThreads中的pthread_mutex_destroy()除了检查锁状态以外(锁定状态则返回EBUSY)没有其他动作。
2. 互斥锁属性
互斥锁的属性在创建锁的时候指定,在LinuxThreads实现中仅有一个锁类型属性,不同的锁类型在试图对一个已经被锁定的互斥锁加锁时表现不同。当前(glibc2.2.3,linuxthreads0.9)有四个值可供选择:
PTHREAD_MUTEX_TIMED_NP,这是缺省值,也就是普通锁。当一个线程加锁以后,其余请求锁的线程将形成一个等待队列,并在解锁后按优先级获得锁。这种锁策略保证了资源分配的公平性。
PTHREAD_MUTEX_RECURSIVE_NP,嵌套锁,允许同一个线程对同一个锁成功获得多次,并通过多次unlock解锁。如果是不同线程请求,则在加锁线程解锁时重新竞争。
PTHREAD_MUTEX_ERRORCHECK_NP,检错锁,如果同一个线程请求同一个锁,则返回EDEADLK,否则与PTHREAD_MUTEX_TIMED_NP类型动作相同。这样就保证当不允许多次加锁时不会出现最简单情况下的死锁。
PTHREAD_MUTEX_ADAPTIVE_NP,适应锁,动作最简单的锁类型,仅等待解锁后重新竞争。
3. 锁操作
锁操作主要包括加锁pthread_mutex_lock()、解锁pthread_mutex_unlock()和测试加锁pthread_mutex_trylock()三个,不论哪种类型的锁,都不可能被两个不同的线程同时得到,而必须等待解锁。对于普通锁和适应锁类型,解锁者可以是同进程内任何线程;而检错锁则必须由加锁者解锁才有效,否则返回EPERM;对于嵌套锁,文档和实现要求必须由加锁者解锁,但实验结果表明并没有这种限制,这个不同目前还没有得到解释。在同一进程中的线程,如果加锁后没有解锁,则任何其他线程都无法再获得锁。
int pthread_mutex_lock(pthread_mutex_t *mutex)
int pthread_mutex_unlock(pthread_mutex_t *mutex)
int pthread_mutex_trylock(pthread_mutex_t *mutex)
pthread_mutex_trylock()语义与pthread_mutex_lock()类似,不同的是在锁已经被占据时返回EBUSY而不是挂起等待。
4. 其他
POSIX线程锁机制的Linux实现都不是取消点,因此,延迟取消类型的线程不会因收到取消信号而离开加锁等待。值得注意的是,如果线程在加锁后解锁前被取消,锁将永远保持锁定状态,因此如果在关键区段内有取消点存在,或者设置了异步取消类型,则必须在退出回调函数中解锁。
这个锁机制同时也不是异步信号安全的,也就是说,不应该在信号处理过程中使用互斥锁,否则容易造成死锁。
二、条件变量
条件变量是利用线程间共享的全局变量进行同步的一种机制,主要包括两个动作:一个线程等待"条件变量的条件成立"而挂起;另一个线程使"条件成立"(给出条件成立信号)。为了防止竞争,条件变量的使用总是和一个互斥锁结合在一起。
1. 创建和注销
条件变量和互斥锁一样,都有静态动态两种创建方式,静态方式使用PTHREAD_COND_INITIALIZER常量,如下:
pthread_cond_t cond=PTHREAD_COND_INITIALIZER
动态方式调用pthread_cond_init()函数,API定义如下:
int pthread_cond_init(pthread_cond_t *cond, pthread_condattr_t *cond_attr)
尽管POSIX标准中为条件变量定义了属性,但在LinuxThreads中没有实现,因此cond_attr值通常为NULL,且被忽略。
注销一个条件变量需要调用pthread_cond_destroy(),只有在没有线程在该条件变量上等待的时候才能注销这个条件变量,否则返回EBUSY。因为Linux实现的条件变量没有分配什么资源,所以注销动作只包括检查是否有等待线程。API定义如下:
int pthread_cond_destroy(pthread_cond_t *cond)
2. 等待和激发
int pthread_cond_wait(pthread_cond_t *cond, pthread_mutex_t *mutex)
int pthread_cond_timedwait(pthread_cond_t *cond, pthread_mutex_t *mutex, const struct timespec *abstime)
等待条件有两种方式:无条件等待pthread_cond_wait()和计时等待pthread_cond_timedwait(),其中计时等待方式如果在给定时刻前条件没有满足,则返回ETIMEOUT,结束等待,其中abstime以与time()系统调用相同意义的绝对时间形式出现,0表示格林尼治时间1970年1月1日0时0分0秒。
无论哪种等待方式,都必须和一个互斥锁配合,以防止多个线程同时请求pthread_cond_wait()(或pthread_cond_timedwait(),下同)的竞争条件(Race Condition)。mutex互斥锁必须是普通锁(PTHREAD_MUTEX_TIMED_NP)或者适应锁(PTHREAD_MUTEX_ADAPTIVE_NP),且在调用pthread_cond_wait()前必须由本线程加锁(pthread_mutex_lock()),而在更新条件等待队列以前,mutex保持锁定状态,并在线程挂起进入等待前解锁。在条件满足从而离开pthread_cond_wait()之前,mutex将被重新加锁,以与进入pthread_cond_wait()前的加锁动作对应。
激发条件有两种形式,pthread_cond_signal()激活一个等待该条件的线程,存在多个等待线程时按入队顺序激活其中一个;而pthread_cond_broadcast()则激活所有等待线程。
3. 其他
pthread_cond_wait()和pthread_cond_timedwait()都被实现为取消点,因此,在该处等待的线程将立即重新运行,在重新锁定mutex后离开pthread_cond_wait(),然后执行取消动作。也就是说如果pthread_cond_wait()被取消,mutex是保持锁定状态的,因而需要定义退出回调函数来为其解锁。
以下示例集中演示了互斥锁和条件变量的结合使用,以及取消对于条件等待动作的影响。在例子中,有两个线程被启动,并等待同一个条件变量,如果不使用退出回调函数(见范例中的注释部分),则tid2将在pthread_mutex_lock()处永久等待。如果使用回调函数,则tid2的条件等待及主线程的条件激发都能正常工作。
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
pthread_mutex_t mutex;
pthread_cond_t cond;
void * child1(void *arg)
{
pthread_cleanup_push(pthread_mutex_unlock,&mutex); /* comment 1 */
while(1){
printf("thread 1 get running
");
printf("thread 1 pthread_mutex_lock returns %d
",
pthread_mutex_lock(&mutex));
pthread_cond_wait(&cond,&mutex);
printf("thread 1 condition applied
");
pthread_mutex_unlock(&mutex);
sleep(5);
}
pthread_cleanup_pop(0); /* comment 2 */
}
void *child2(void *arg)
{
while(1){
sleep(3); /* comment 3 */
printf("thread 2 get running.
");
printf("thread 2 pthread_mutex_lock returns %d
",
pthread_mutex_lock(&mutex));
pthread_cond_wait(&cond,&mutex);
printf("thread 2 condition applied
");
pthread_mutex_unlock(&mutex);
sleep(1);
}
}
int main(void)
{
int tid1,tid2;
printf("hello, condition variable test
");
pthread_mutex_init(&mutex,NULL);
pthread_cond_init(&cond,NULL);
pthread_create(&tid1,NULL,child1,NULL);
pthread_create(&tid2,NULL,child2,NULL);
do{
sleep(2); /* comment 4 */
pthread_cancel(tid1); /* comment 5 */
sleep(2); /* comment 6 */
pthread_cond_signal(&cond);
}while(1);
sleep(100);
pthread_exit(0);
}
如果不做注释5的pthread_cancel()动作,即使没有那些sleep()延时操作,child1和child2都能正常工作。注释3和注释4的延迟使得child1有时间完成取消动作,从而使child2能在child1退出之后进入请求锁操作。如果没有注释1和注释2的回调函数定义,系统将挂起在child2请求锁的地方;而如果同时也不做注释3和注释4的延时,child2能在child1完成取消动作以前得到控制,从而顺利执行申请锁的操作,但却可能挂起在pthread_cond_wait()中,因为其中也有申请mutex的操作。child1函数给出的是标准的条件变量的使用方式:回调函数保护,等待条件前锁定,pthread_cond_wait()返回后解锁。
条件变量机制不是异步信号安全的,也就是说,在信号处理函数中调用pthread_cond_signal()或者pthread_cond_broadcast()很可能引起死锁。
三、信号灯
信号灯与互斥锁和条件变量的主要不同在于"灯"的概念,灯亮则意味着资源可用,灯灭则意味着不可用。如果说后两中同步方式侧重于"等待"操作,即资源不可用的话,信号灯机制则侧重于点灯,即告知资源可用;没有等待线程的解锁或激发条件都是没有意义的,而没有等待灯亮的线程的点灯操作则有效,且能保持灯亮状态。当然,这样的操作原语也意味着更多的开销。
信号灯的应用除了灯亮/灯灭这种二元灯以外,也可以采用大于1的灯数,以表示资源数大于1,这时可以称之为多元灯。
1. 创建和注销
POSIX信号灯标准定义了有名信号灯和无名信号灯两种,但LinuxThreads的实现仅有无名灯,同时有名灯除了总是可用于多进程之间以外,在使用上与无名灯并没有很大的区别,因此下面仅就无名灯进行讨论。
int sem_init(sem_t *sem, int pshared, unsigned int value)
这是创建信号灯的API,其中value为信号灯的初值,pshared表示是否为多进程共享而不仅仅是用于一个进程。LinuxThreads没有实现多进程共享信号灯,因此所有非0值的pshared输入都将使sem_init()返回-1,且置errno为ENOSYS。初始化好的信号灯由sem变量表征,用于以下点灯、灭灯操作。
int sem_destroy(sem_t * sem)
被注销的信号灯sem要求已没有线程在等待该信号灯,否则返回-1,且置errno为EBUSY。除此之外,LinuxThreads的信号灯注销函数不做其他动作。
2. 点灯和灭灯
int sem_post(sem_t * sem)
点灯操作将信号灯值原子地加1,表示增加一个可访问的资源。
int sem_wait(sem_t * sem)
int sem_trywait(sem_t * sem)
sem_wait()为等待灯亮操作,等待灯亮(信号灯值大于0),然后将信号灯原子地减1,并返回。sem_trywait()为sem_wait()的非阻塞版,如果信号灯计数大于0,则原子地减1并返回0,否则立即返回-1,errno置为EAGAIN。
3. 获取灯值
int sem_getvalue(sem_t * sem, int * sval)
读取sem中的灯计数,存于*sval中,并返回0。
4. 其他
sem_wait()被实现为取消点,而且在支持原子"比较且交换"指令的体系结构上,sem_post()是唯一能用于异步信号处理函数的POSIX异步信号安全的API。
四、异步信号
由于LinuxThreads是在核外使用核内轻量级进程实现的线程,所以基于内核的异步信号操作对于线程也是有效的。但同时,由于异步信号总是实际发往某个进程,所以无法实现POSIX标准所要求的"信号到达某个进程,然后再由该进程将信号分发到所有没有阻塞该信号的线程中"原语,而是只能影响到其中一个线程。
POSIX异步信号同时也是一个标准C库提供的功能,主要包括信号集管理(sigemptyset()、sigfillset()、sigaddset()、sigdelset()、sigismember()等)、信号处理函数安装(sigaction())、信号阻塞控制(sigprocmask())、被阻塞信号查询(sigpending())、信号等待(sigsuspend())等,它们与发送信号的kill()等函数配合就能实现进程间异步信号功能。LinuxThreads围绕线程封装了sigaction()何raise(),本节集中讨论LinuxThreads中扩展的异步信号函数,包括pthread_sigmask()、pthread_kill()和sigwait()三个函数。毫无疑问,所有POSIX异步信号函数对于线程都是可用的。
int pthread_sigmask(int how, const sigset_t *newmask, sigset_t *oldmask)
设置线程的信号屏蔽码,语义与sigprocmask()相同,但对不允许屏蔽的Cancel信号和不允许响应的Restart信号进行了保护。被屏蔽的信号保存在信号队列中,可由sigpending()函数取出。
int pthread_kill(pthread_t thread, int signo)
向thread号线程发送signo信号。实现中在通过thread线程号定位到对应进程号以后使用kill()系统调用完成发送。
int sigwait(const sigset_t *set, int *sig)
挂起线程,等待set中指定的信号之一到达,并将到达的信号存入*sig中。POSIX标准建议在调用sigwait()等待信号以前,进程中所有线程都应屏蔽该信号,以保证仅有sigwait()的调用者获得该信号,因此,对于需要等待同步的异步信号,总是应该在创建任何线程以前调用pthread_sigmask()屏蔽该信号的处理。而且,调用sigwait()期间,原来附接在该信号上的信号处理函数不会被调用。
如果在等待期间接收到Cancel信号,则立即退出等待,也就是说sigwait()被实现为取消点。
五、其他同步方式
除了上述讨论的同步方式以外,其他很多进程间通信手段对于LinuxThreads也是可用的,比如基于文件系统的IPC(管道、Unix域Socket等)、消息队列(Sys.V或者Posix的)、System V的信号灯等。只有一点需要注意,LinuxThreads在核内是作为共享存储区、共享文件系统属性、共享信号处理、共享文件描述符的独立进程看待的。
六、条件变量与互斥锁、信号量的区别
1).互斥锁必须总是由给它上锁的线程解锁,信号量的挂出即不必由执行过它的等待操作的同一进程执行。一个线程可以等待某个给定信号灯,而另一个线程可以挂出该信号灯。
2).互斥锁要么锁住,要么被解开(二值状态,类型二值信号量)
3).由于信号量有一个与之关联的状态(它的计数值),信号量挂出操作总是被记住。然而当向一个条件变量发送信号时,如果没有线程等待在该条件变量上,那么该信号将丢失。
4).互斥锁是为了上锁而设计的,条件变量是为了等待而设计的,信号灯即可用于上锁,也可用于等待,因而可能导致更多的开销和更高的复杂性。