蓝点DWM1000 模块已经打样测试完毕,有兴趣的可以申请购买了,更多信息参见 蓝点论坛
正文:
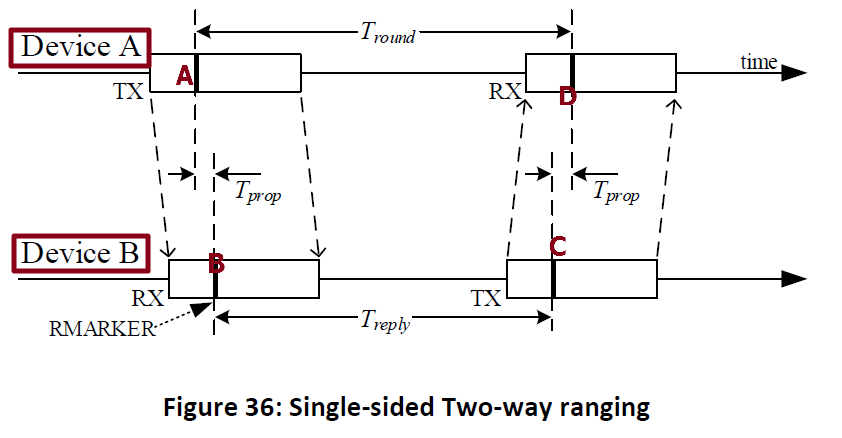
首先将SS 原理介绍中的图片拿过来,将图片印在脑海里。
对于DeviceA 和 DeviceB来说,初始化代码都一样,而后面部分是一个while循环,一直执行测距任务。
DeviceA(ex_06a_ss_twr_init ) 部分代码
1 tx_poll_msg[ALL_MSG_SN_IDX] = frame_seq_nb; 2 dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_TXFRS); 3 dwt_writetxdata(sizeof(tx_poll_msg), tx_poll_msg, 0); 4 dwt_writetxfctrl(sizeof(tx_poll_msg), 0); 5 6 /* Start transmission, indicating that a response is expected so that reception is enabled automatically after the frame is sent and the delay 7 * set by dwt_setrxaftertxdelay() has elapsed. */ 8 dwt_starttx(DWT_START_TX_IMMEDIATE | DWT_RESPONSE_EXPECTED); 9 10 /* We assume that the transmission is achieved correctly, poll for reception of a frame or error/timeout. See NOTE 8 below. */ 11 while (!((status_reg = dwt_read32bitreg(SYS_STATUS_ID)) & (SYS_STATUS_RXFCG | SYS_STATUS_ALL_RX_ERR))) 12 { };
上述过程主要完成任务:发送数据以及打开接收器等待数据
DWM1000 发送数据通常只需要调用三个函数即可: dwt_writetxdata dwt_writetxfctrl dwt_starttx
dwt_writetxdata 指定发送什么数据,上述代码发送的数据是 tx_poll_msg,另外两个参数分别是发送数据长度,以及要将数据放到DWM1000 发送缓存的offset(默认设置为0即可)
dwt_writetxfctrl 发送控制参数设定,这个基本也是不需要修改,第一个参数是发送数据长度,第二个参数告诉DWM1000 从发送缓存那个offset 开始发送(也就是说,并不是放到发送缓存中的数据就会被发送出去)
dwt_starttx:启动发送,一共参数,可以按位控制,上述代码中第一个控制是否里面发送或者是延时发送,第二个控制是否在一定时间后打开接收器。
注意:在调试过程中,如果需要发送数据后再接收一个数据,通常需要使用DWT_RESPONSE_EXPECTED,而且要考虑POLL_TX_TO_RESP_RX_DLY_UUS,这个参数在dwt_setrxaftertxdelay中设定。
DWM1000 有很多事件,也有对应的标志flag,例如发送数据,对应的发送成功标志,接收数据,有对应的接收成功标志,当然也有fail的标志,具体可以参见《dw1000_user_manual.pdf》的 Register file: 0x0F – System Event Status Register。
事件flag 有很多,我们在基础实验中基本只会遇到上述代码中的 SYS_STATUS_TXFRS /SYS_STATUS_RXFCG/SYS_STATUS_ALL_RX_ERR,分表表示发送成功标志、接收成功标志以及接收错误,其中接收错误标志其实代码中是很多flag 的或,例如数据帧错误,timeout 等。所有flag 都是写1 清0.
完成上述代码分析,再看剩余两行代码
1 dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_TXFRS); 2 /* We assume that the transmission is achieved correctly, poll for reception of a frame or error/timeout. See NOTE 8 below. */ 3 while (!((status_reg = dwt_read32bitreg(SYS_STATUS_ID)) & (SYS_STATUS_RXFCG | SYS_STATUS_ALL_RX_ERR))) 4 { };
第一行是在发送之前,将可能的发送完成标志位清除,后面的while 循环是等待flag 置起来,也就是在等待DeviceB发送来的无线数据(并不是无限期等待,等待时间timeout 上面的代码直接设置过了)。
上述代码分析完成了DeviceA 在A点的任务。
DeviceB 代码分析
DeviceB的代码在ex_06b_ss_twr_resp目录,同样有dwm1000初始化,这个所有dwm1000 基础工程都一样,剩余部分也是一个while1 大循环。现在拿出部分代码,分析DeviceB在B点的动作。
1 /* Activate reception immediately. */ 2 dwt_rxenable(0); 3 4 /* Poll for reception of a frame or error/timeout. See NOTE 6 below. */ 5 while (!((status_reg = dwt_read32bitreg(SYS_STATUS_ID)) & (SYS_STATUS_RXFCG | SYS_STATUS_ALL_RX_ERR))) 6 { }; 7 8 if (status_reg & SYS_STATUS_RXFCG) 9 { 10 uint32 frame_len; 11 12 /* Clear good RX frame event in the DW1000 status register. */ 13 dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_RXFCG); 14 15 /* A frame has been received, read it into the local buffer. */ 16 frame_len = dwt_read32bitreg(RX_FINFO_ID) & RX_FINFO_RXFL_MASK_1023; 17 if (frame_len <= RX_BUFFER_LEN) 18 { 19 dwt_readrxdata(rx_buffer, frame_len, 0); 20 } 21 22 /* Check that the frame is a poll sent by "SS TWR initiator" example. 23 * As the sequence number field of the frame is not relevant, it is cleared to simplify the validation of the frame. */ 24 rx_buffer[ALL_MSG_SN_IDX] = 0; 25 if (memcmp(rx_buffer, rx_poll_msg, ALL_MSG_COMMON_LEN) == 0) 26 { 27 uint32 resp_tx_time; 28 29 /* Retrieve poll reception timestamp. */ 30 poll_rx_ts = get_rx_timestamp_u64();
上面代码摘自ex_06b_ss_twr_resp while 大循环部分代码
首先是 dwt_rxenable(0), 这个作用是强制打开接收器,参数为timeout,设置为0,意思就是一直打开。 后面的while在Device 中已经看到,是等待接收数据,如果接收成功,SYS_STATUS_RXFCG 被置为1。 可以看到除了判断SYS_STATUS_RXFCG 还判断了SYS_STATUS_ALL_RX_ERR,这个是所有RX 可能出现ERROR 合集事件,我们期望的结果是SYS_STATUS_RXFCG ,弱实际中由于干扰接收到错误的信息SYS_STATUS_ALL_RX_ERR 会被置起来,也会退出while 等待,会接着执行后面的else,else的任务是清除SYS_STATUS_ALL_RX_ERR ,然后重新回到大while 循环等待接收数据。
假如接收到数据,就会执行if 判断力的代码,首先清除接收标志SYS_STATUS_RXFCG,然后通过两个API读取数据长度以及数据
1 frame_len = dwt_read32bitreg(RX_FINFO_ID) & RX_FINFO_RXFL_MASK_1023; 2 if (frame_len <= RX_BUFFER_LEN) 3 { 4 dwt_readrxdata(rx_buffer, frame_len, 0); 5 }
后面的判断是判断数据类型
1 if (memcmp(rx_buffer, rx_poll_msg, ALL_MSG_COMMON_LEN) == 0)
在DWM1000 基础例子中,有很多种不同的数据,数据通常包括三部分(A+B+C),A是数据头,B是实际用户希望传输的数据,C是两byte 校验码,其中A部分是Device之前相互约定,C是DWM1000 自动生成的,B根据实际应用更改。
在SS-TWR中,有两种信息,分别是 rx_poll_msg 和 tx_resp_msg ,poll_msg是DeviceA 发送给DeviceB的,而 resp_meg 是DeviceB发送给DeviceA 的,而在DS-TWR中会有更多信息,这个完全可以自由扩展。
而代码中通过if 判断,判断信息是DeviceA发送给DeviceB的poll_msg后,紧接着就读取了自己接收数据的时刻
1 poll_rx_ts = get_rx_timestamp_u64();
注意:虽然 get_rx_timestamp_u64 不是标准dwt API,但是这个函数里面是直接调用API实现的,保持下来以后可以直接当API使用。
以上代码就是DeviceB 在B 时刻接收数据的代码。