最近邻插值
这是一种简单的插值算法:不需要计算,在待求象素的四邻象素中,将距离待求象素最近的邻象素灰度赋给待求象素
设i+u, j+v(i, j为正整数, u, v为大于零小于1的小数,下同)为待求象素坐标,则待求象素灰度的值 f(i+u, j+v)
如下图所示:

如果(i+u, j+v)落在A区,即u<0.5, v<0.5,则将左上角象素的灰度值赋给待求象素,同理,落在B区则赋予右上角的象素灰度值,落在C区则赋予左下角象素的灰度值,落在D区则赋予右下角象素的灰度值。
最邻近元法计算量较小,但可能会造成插值生成的图像灰度上的不连续,在灰度变化的地方可能出现明显的锯齿状。
tf.image.resize_nearest_neighbor(
images,
size,
align_corners=False,
name=None
)
使用最近邻插值调整images为size.
参数:
images:一个Tensor,必须是下列类型之一:int8,uint8,int16,uint16,int32,int64,half,float32,float64.4-D与形状[batch, height, width, channels].
size:2个元素(new_height, new_width)的1维int32张量,表示图像的新大小.
align_corners:可选的bool,默认为False,如果为True,则输入和输出张量的4个角像素的中心对齐,并保留角落像素处的值.
name:操作的名称(可选).
返回:
基本原理
最简单的图像缩放算法就是最近邻插值。顾名思义,就是将目标图像各点的像素值设为源图像中与其最近的点。算法优点在与简单、速度快。
如下图所示,一个4*4的图片缩放为8*8的图片。步骤:
生成一张空白的8*8的图片,然后在缩放位置填充原始图片值(可以这么理解)
在图片的未填充区域(黑色部分),填充为原有图片最近的位置的像素值。
import cv2 def nearest_neighbor_resize(img, new_w, new_h): # height and width of the input img h, w = img.shape[0], img.shape[1] # new image with rgb channel ret_img = np.zeros(shape=(new_h, new_w, 3), dtype='uint8') # scale factor s_h, s_c = (h * 1.0) / new_h, (w * 1.0) / new_w # insert pixel to the new img for i in range(new_h): for j in range(new_w): p_x = int(j * s_c) p_y = int(i * s_h) ret_img[i, j] = img[p_y, p_x] return ret_img def test(): img_path = 'E:/PycharmProjects/style_transfer2/data/images/neural-style/tim.jpg' img = cv2.imread(img_path) ret_img = nearest_neighbor_resize(img, 222, 220) cv2.imshow("source image", img) cv2.imshow("after bilinear image", ret_img) cv2.waitKey() cv2.destroyAllWindows() def main(): test() if __name__ == '__main__': main()

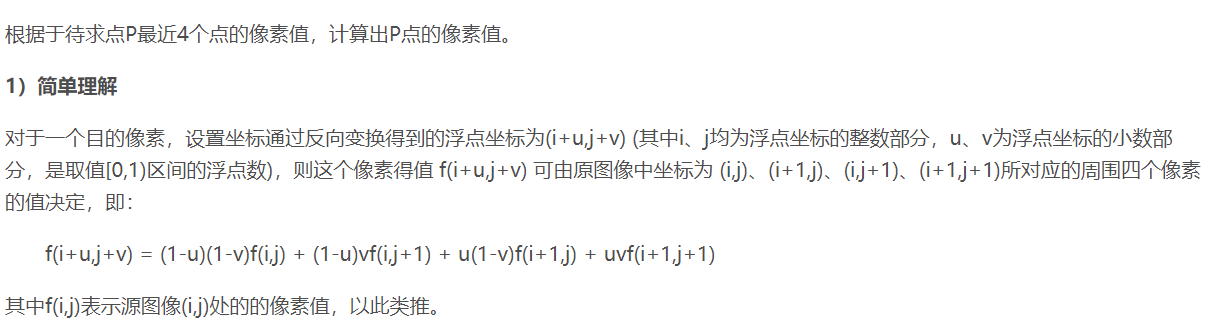
2.双线性插值
tf.image.resize_bilinear函数
tf.image.resize_bilinear(
images,
size,
align_corners=False,
name=None
)使用双线性插值调整images为size.
输入图像可以是不同的类型,但输出图像总是浮点型的.
参数:
- images:一个Tensor,必须是下列类型之一:int8,uint8,int16,uint16,int32,int64,bfloat16,half,float32,float64;4维的并且具有形状[batch, height, width, channels].
- size:2个元素(new_height, new_width)的1维int32张量,用来表示图像的新大小.
- align_corners:可选的bool,默认为False;如果为True,则输入和输出张量的4个角像素的中心对齐,并且保留角落像素处的值.
- name:操作的名称(可选).
返回值:
该函数返回float32类型的Tensor.
import cv2 import numpy as np import tensorflow as tf img= cv2.imread('./style_imgs/10.png') cv2.imshow('svf',img) imgInfo = img.shape #(height,width,mode) = imgInfo # dstHeight = int(height/2) # dstWidth = int(width/2) # dstImg = np.zeros((dstHeight,dstWidth,3),np.uint8) print(imgInfo) # for i in range(0,dstHeight): # for j in range(0,dstWidth): # #左上角的点坐标为a和 b # a = int(i*(height/dstHeight)) # b = int(j*(width/dstWidth)) # rH= i*(height/dstHeight) - a # rW= j*(width/dstWidth) - b # dstImg[i,j] = (1-rW)*(1-rH)*img[a,b] + (1-rW)*(rH)*img[a+1,b] + (rW)*(1-rH)*img[a,b+1] + (rW)*(rH)*img[a+1,b+1]; # cv2.imshow('dst',dstImg) # cv2.waitKey(0)