可以根据状态量(位置,速度,加速度)的起始和结束值列出6个方程,组成方程组解该问题。
1. 列出起始状态:

2. 列出终止状态:

3. 写成矩阵形式:
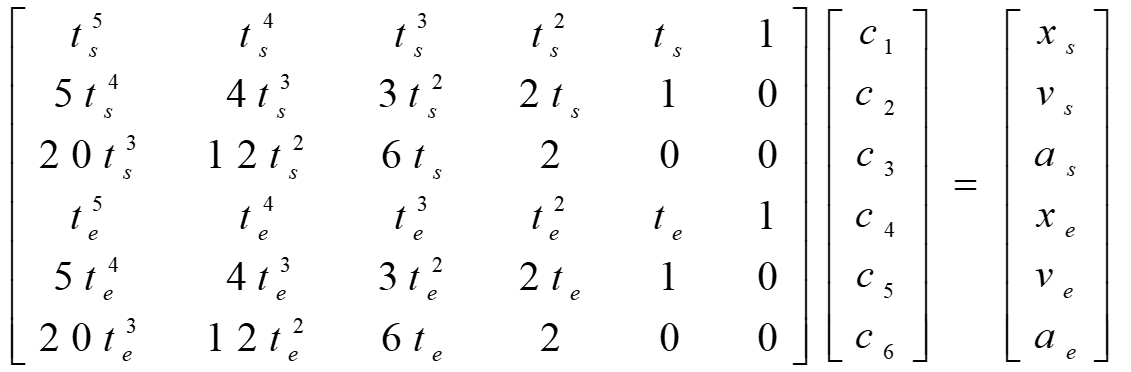
求解c即可。
下面是从横向-5米到5米的生成的路径。
代码如下:
clear all;close all;clc; ts = 0;te = 10; %起始结束时间 xs = [ts^5 ts^4 ts^3 ts^2 ts 1]; %起始状态x v a vs = [5*ts^4 4*ts^3 3*ts^2 2*ts 1 0]; as = [20*ts^3 12*ts^2 6*ts 2 0 0]; xe = [te^5 te^4 te^3 te^2 te 1]; %结束状态x v a ve = [5*te^4 4*te^3 3*te^2 2*te 1 0]; ae = [20*te^3 12*te^2 6*te 2 0 0]; A=[xs;vs;as;xe;ve;ae]; t=ts:0.01:te; for i=-5:5 B=[0 0 0 i 0 0]'; %[xs vs as xe ve ae] %都是横向的状态 X = inv(A)*B; x = X(1)*t.^5+X(2)*t.^4+X(3)*t.^3+X(4)*t.^2+X(5)*t + X(6); v = 5*X(1)*t.^4+4*X(2)*t.^3+3*X(3)*t.^2+2*X(4)*t+X(5); a = 20*X(1)*t.^3+12*X(2)*t.^2+6*X(3)*t+2*X(4); subplot(3,1,1); plot(t,x) %位置 hold on; subplot(3,1,2); plot(t,v) %速度 hold on; subplot(3,1,3); plot(t,a) %加速度 hold on; end
结果如下:
