之前用simulink仿过一次PID算法,这次用代码实现一遍。
该算法工程性很强,一般需要结合实际调整一个合适的参数用于控制。
matlab代码如下:
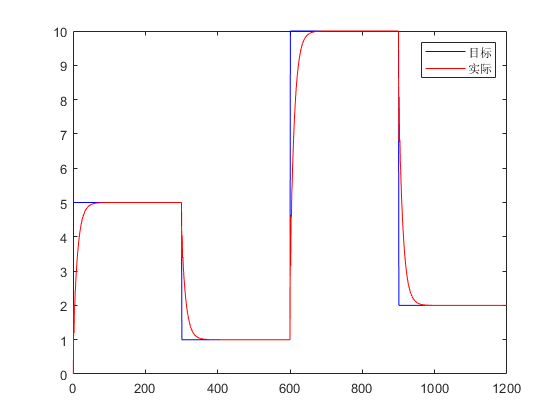
clear all;close all;clc; target_speed = [5*ones(300,1);ones(300,1);ones(300,1)*10;ones(300,1)*2]; real_speed = zeros(length(target_speed),1); Kp = 0.2;Ki = 0.1;Kd = 0.1; intergral = 0; pre_err = 0; for i=2:length(target_speed) err = target_speed(i) - real_speed(i-1); intergral = intergral + err; u = Kp*err + Ki*intergral + Kd*(err - pre_err); pre_err = err; real_speed(i) = u; %简化一下,控制量直接转为状态量了 end plot(target_speed,'b') hold on; plot(real_speed,'r') legend('目标','实际')
结果如下: