Bug算法是一种避障算法,思路就是想象从起始点有一只小虫,不停延直线靠近目标,如果遇见障碍物,则沿着障碍物边界移动,绕过障碍物后继续沿直线靠近目标。
从上面说的思想就可以认为该算法由两种路径组成,一种直线路径,一种障碍物环绕路径。
直线路径可以认为是起点到终点的线段,不过该线段要去除掉和障碍物相交的部分。
环绕路径这里用了取巧的方法,由于这里用的是栅格图,因此先用腐蚀膨胀的图像处理方法得到所有障碍物边缘路径,然后再做边界跟踪,就得到环绕路径了。
最后合成直线路径和环绕路径,即可得到最终结果。
matlab程序如下:
clear all; close all; clc; path=[]; se = strel('cube',3); map = imread('bg.bmp'); edge = map - imerode(map,se); flag=zeros(size(edge)); imshow(map); hold on; p=ginput(); %选取起始与结束位置 plot(p(:,1),p(:,2),'ro') startp = p(1,:); endp = p(2,:); curp = startp; keyp =[]; d = norm(endp-startp); direct = atan2(endp(1)-startp(1),endp(2)-startp(2)); sin_dir = sin(direct); cos_dir = cos(direct); for r=0:d %生成起始到终点的直线路径 p = floor(startp + r*[sin_dir cos_dir]); if map(p(2),p(1))==255 curp=[curp;p]; end if edge(p(2),p(1))==255 && map(p(2),p(1))==255 if isempty(keyp)==1 keyp = [keyp;p]; end if norm(p-keyp(end,:))<2 keyp(end,:) = p; else keyp = [keyp;p]; end end end near=[-1 -1;-1 0; -1 1; 0 1;0 -1; 1 1;1 0;1 -1]; if isempty(keyp)~=1 %生成环绕障碍物的路径 pcpcell = cell(length(keyp)/2,1); for i=1:2:length(keyp) aroundp = keyp(i,:); endp = keyp(i+1,:); flag(aroundp(2),aroundp(1)) = 1; while norm(aroundp(end,:)-endp)>1 tmp = aroundp(end,:)+near; for j=1:8 if edge(tmp(j,2),tmp(j,1))==255 && flag(tmp(j,2),tmp(j,1))==0 aroundp = [aroundp;tmp(j,:)]; flag(tmp(j,2),tmp(j,1)) = 1; break; end end end pcpcell{(i+1)/2} = aroundp; end j=1; %对两类路径进行合并 for i=1:length(curp) if j<=length(pcpcell) if curp(i,:) == keyp(j*2-1,:) path=[path;pcpcell{j}]; j = j+1; else path=[path;curp(i,:)]; end else path=[path;curp(i,:)]; end end else path = curp; end plot(path(:,1),path(:,2),'g.');
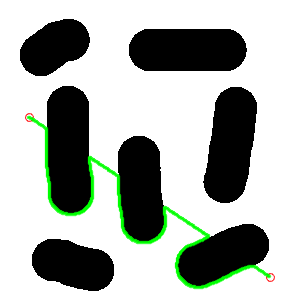
结果如下:

计算路径: