【Unity3D人工智能编程精粹】
1、运动层、决策层、战略层。
运动层、决策层包含的算法是针对单个角色的,战略层是针对小队乃至更大规模群体的。
导航和寻路是运行层的主要任务。
决策层决定角色下一时间步该做什么。
感知(Sense)-> 思考(Think)-> 行动(Act)。
2、通过产生一定大小、方向的操控力,使角色以某种方工运动。Unity3d提供的开源库 UnitySteer 可以快捷地实现操控行为。
3、如果游戏的决策系统不是很复杂,只要利用 FSM 就可以实现。在处理大规模的问题时,FSM很难复用、维护、调试。行为树层次清晰,易于模块化,简洁高效。
4、每一个物体拥有 position、mass、velocity、orientation。以及 max_force、max_speed。
这个物体位置的计算方法:
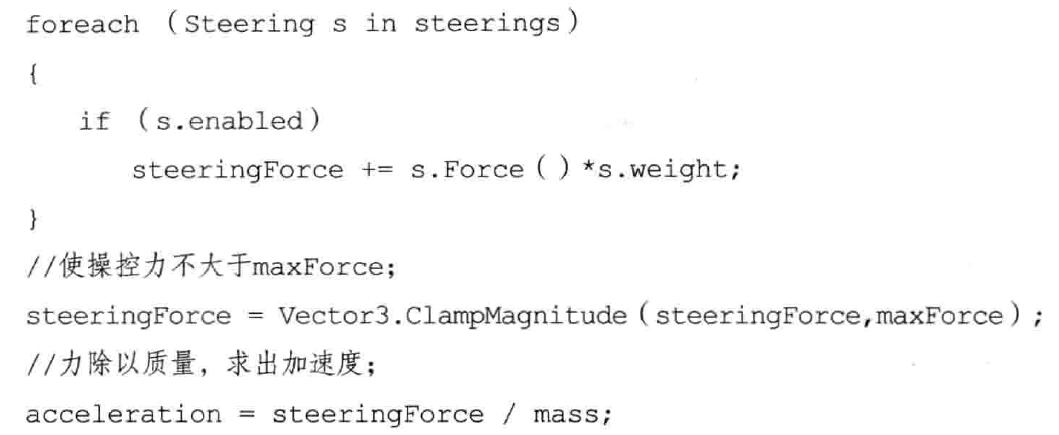
1)确定每一帧的当前操作力(最大不超过max_force)。
2)除以交通工具的质量mass,可以确定一个加速度。
3)将这个加速度与原来的速度相加,得到新的速度(最大不超过max_speed)。
4)根据速度和这一帧时间,计算出位置的变化 。
5)与原来的位置相加,得到新位置。

5、Vehicle类。一个物体可以受到多个操作力。,每个操作力有各自的weight。
注意 steering_force 是一个向量:
![]()
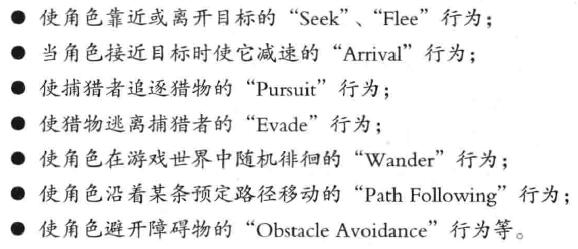
分别有以下类型的个体操作行为:
6、AILocomotion 中速度的计算。注意 moveDistance是向量。
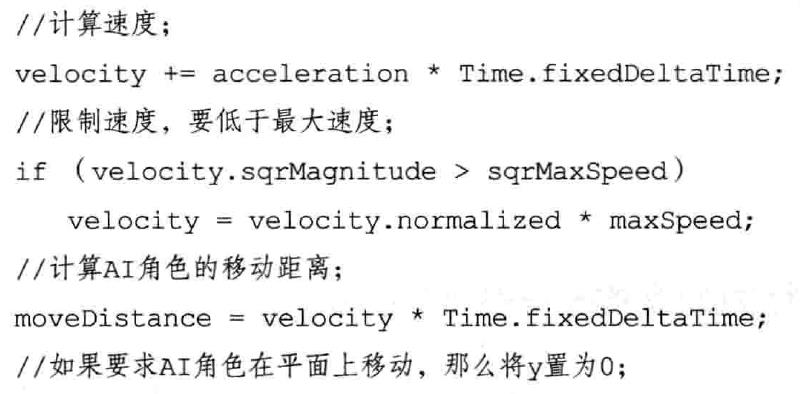
通过 slerp 防止方向大幅抖动。

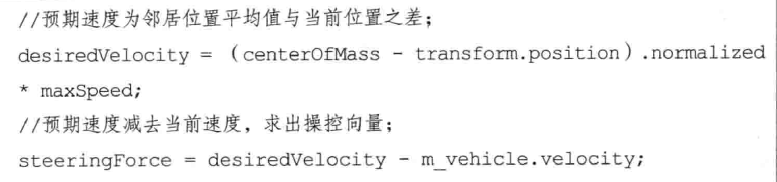
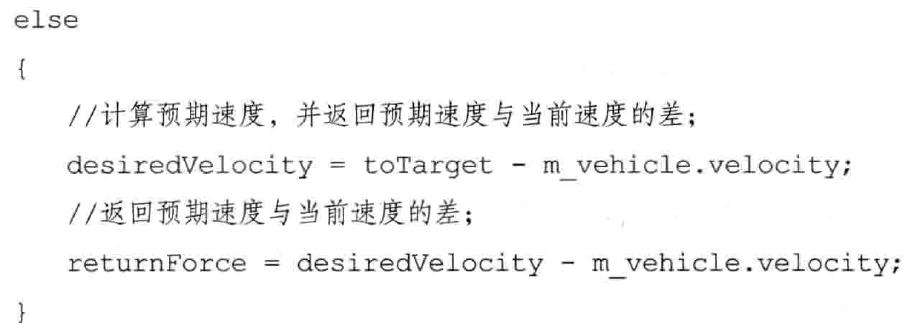
7、操作向量是预期速度与当前速度的差。
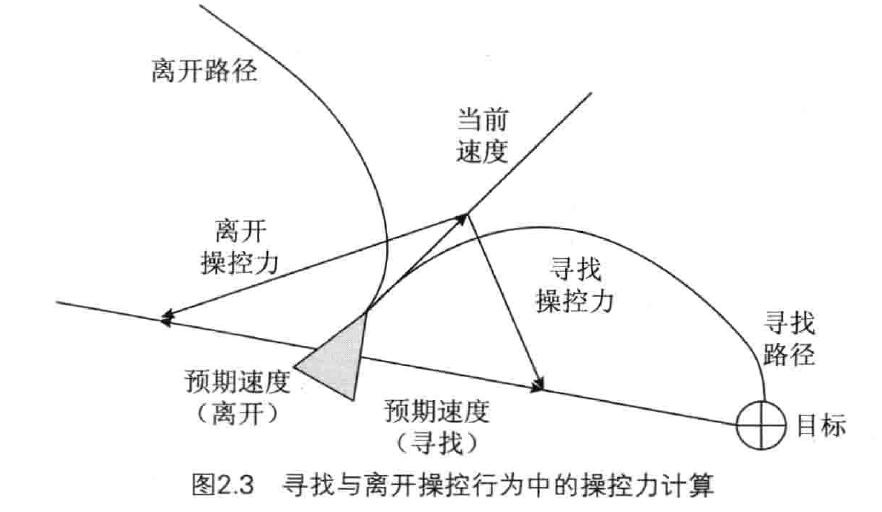
8、1)SteeringForSeek。


9、2)SteeringForFlee。与Seek相比,多了fearDistance,另外DesiredVelocity速度相反。

10、3)SteeringForAttrive。以Target为中心,圆外径直冲向Target,圆内减速。
注意:以下代码,应当对 desiredVelocity进行限速。
11、4)SteeringForPersuit。目标不再是静态物体,而是会移动的物体。
当距离很近时,直接冲向目标。当距离较远时,需要预测在哪个postion,可能追上Target。
注意:不是追逐Target下一帧的位置,而是追逐预测的相遇点的位置。

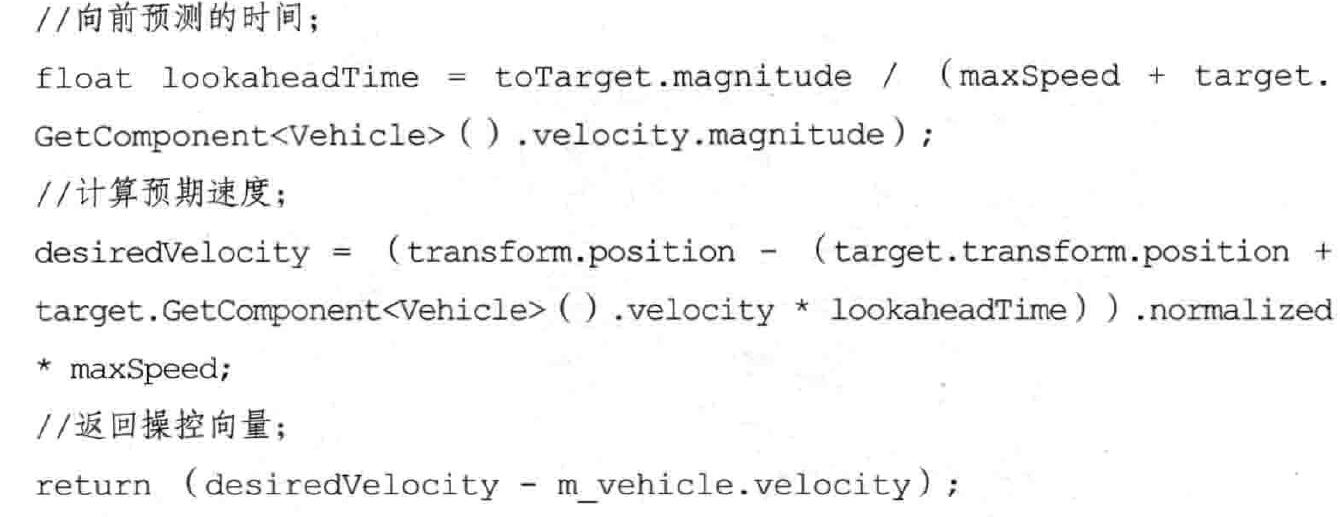
12、5)SteeringForEvade。预测目标将在哪个positon追上自己,然后给一个相反方向的力。
注意:以下 lookaheadTime 代表的是最快可能追上的时间。
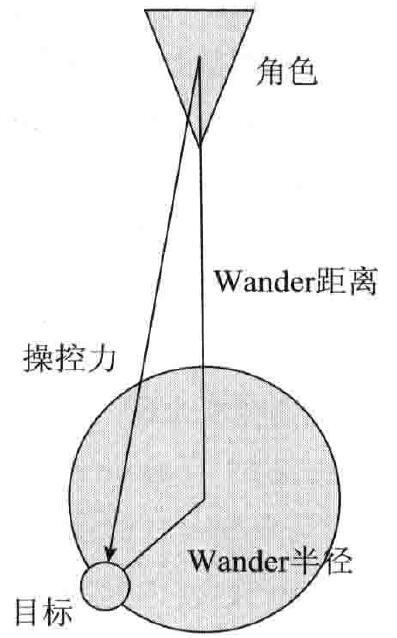
13、6)SteeringForWander。
随机瞎逛,一种通常的做法是,每隔几秒随机一个目标位置,让角色奔向这个位置。这种做法存在角色突然调头的问题,体验不是很好。

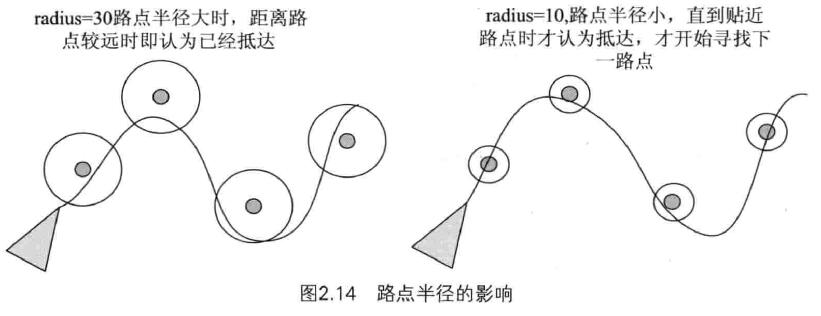
14、7)SteeringForPath(路径跟随)。路点半径,当角色距离目标点多远时认为已经达到,从而继续向下一个路点前进。
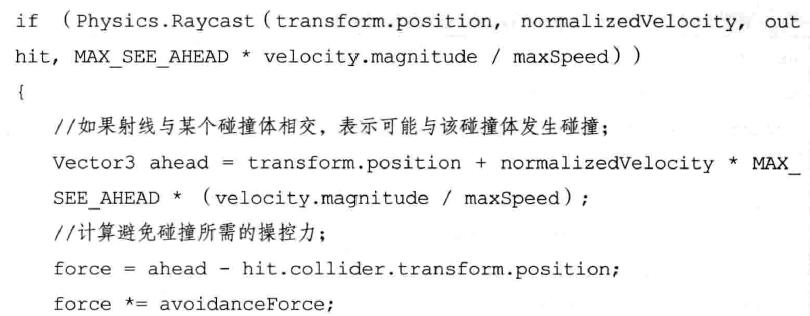
15、8)SteeringForAvoidance。只躲避最近的障碍物。

avoidance_force = ahead - obstacle_center。
注意:下面代码使用 Physics.Raycast 进行碰撞检测,并未使用 Half Ahead方法。
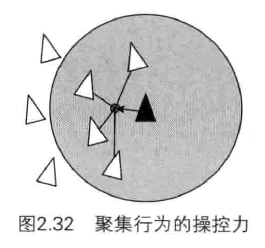
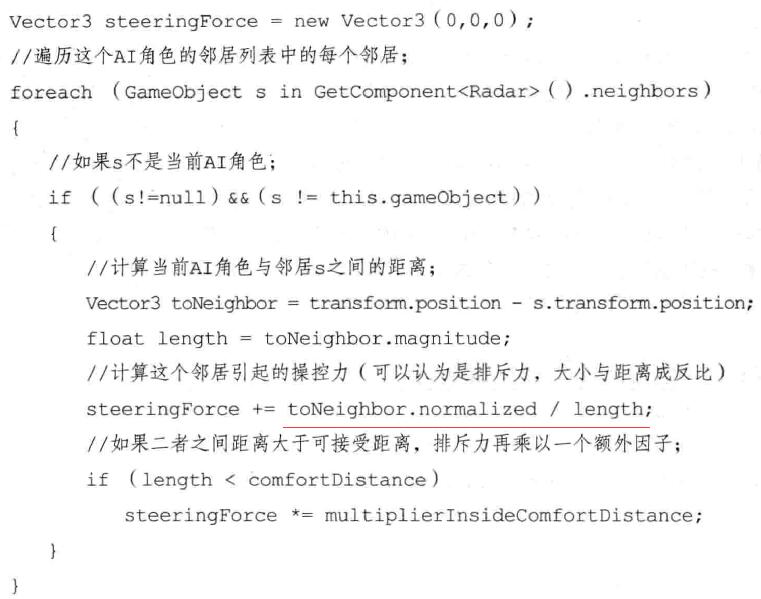
16、群体行为。
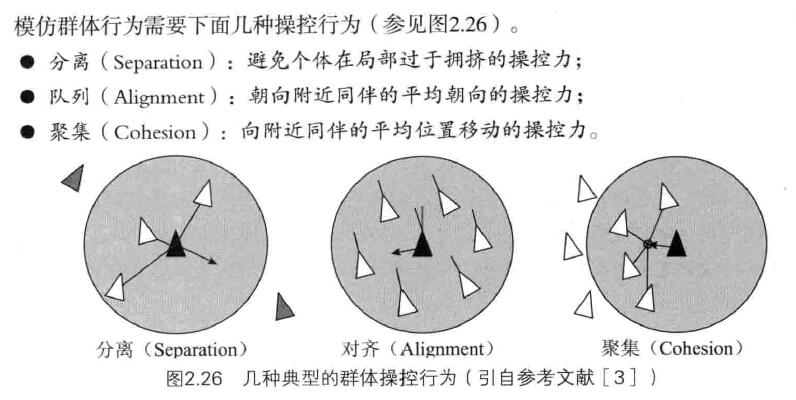
17、SteeringForSeparation.cs
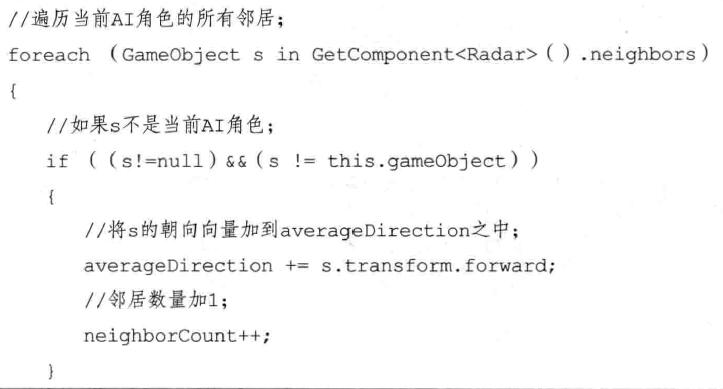
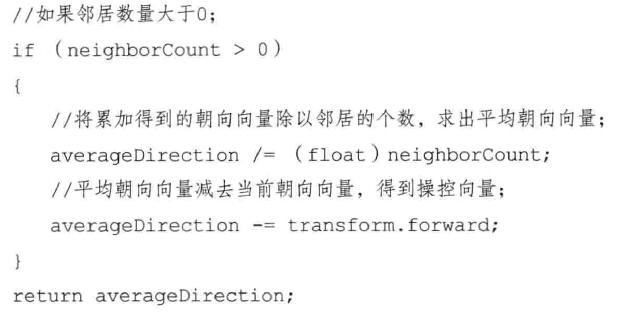
18、SteeringForAlighment。

19、SteeringForCohesion。