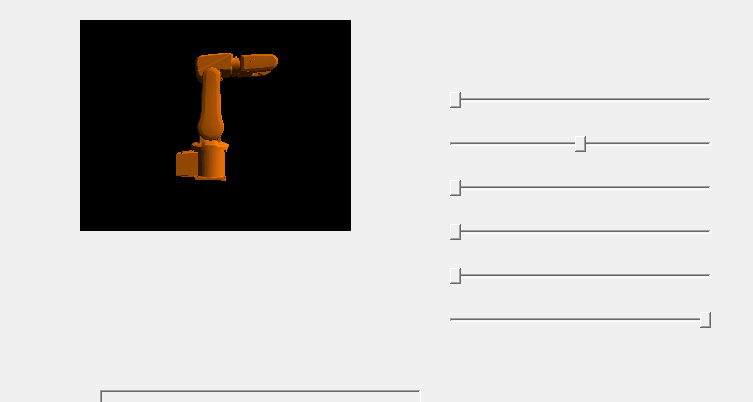
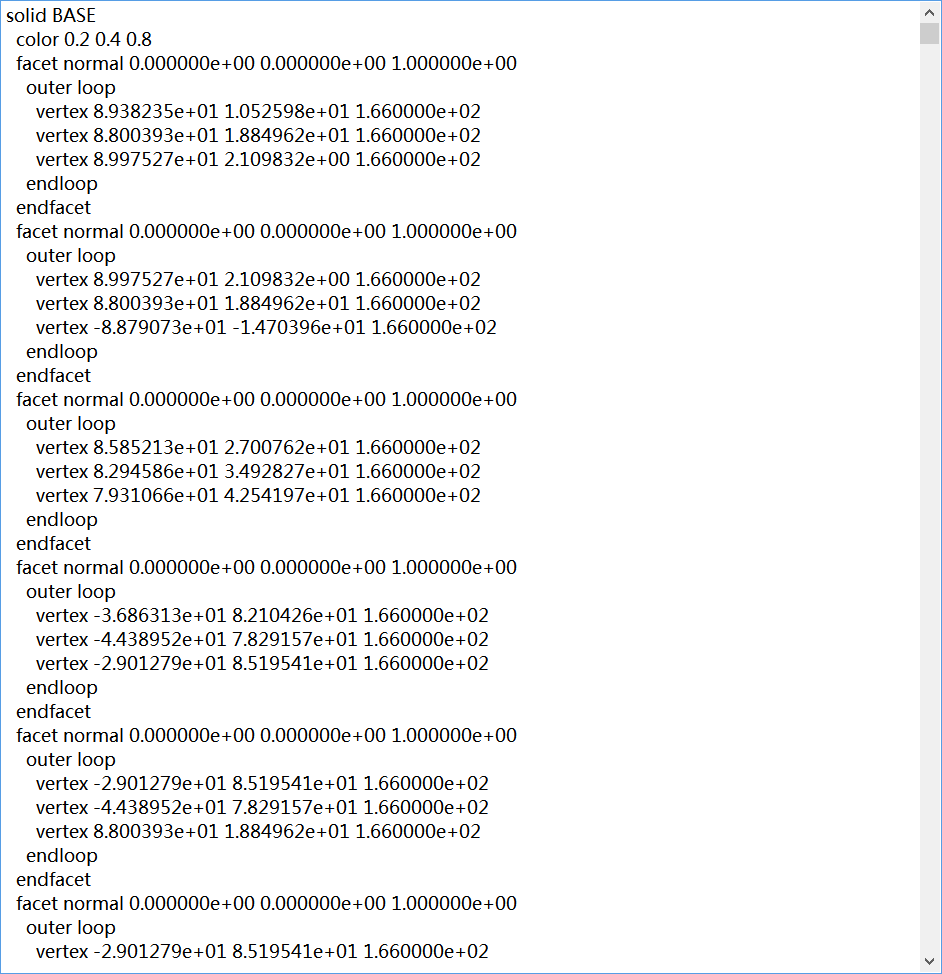
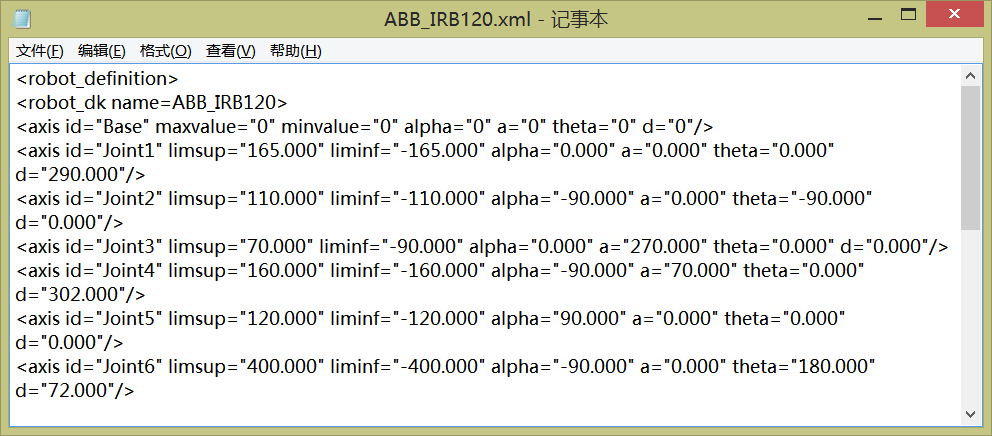
使用Qt opengl 显示机械手模型【Robotics_openGL_simulation】 【Robotics_openGL_simulation】 加载模型文件 文件中点的坐标都是以世界坐标系作为原点,给动画制作带来麻烦;需要在初始状态下转换到连杆自身坐标系下; 机器人的配置文件中已经给出了机器人的关节参数为DH参数;