一,位式控制算法

存在的问题
1. 算法过于简单,由于输出只有二值,且执行部件具有惯性,最终导致不能稳定到set_value,而是在set_value上下大范围波动
2. 只考虑控制对象当前的状态值
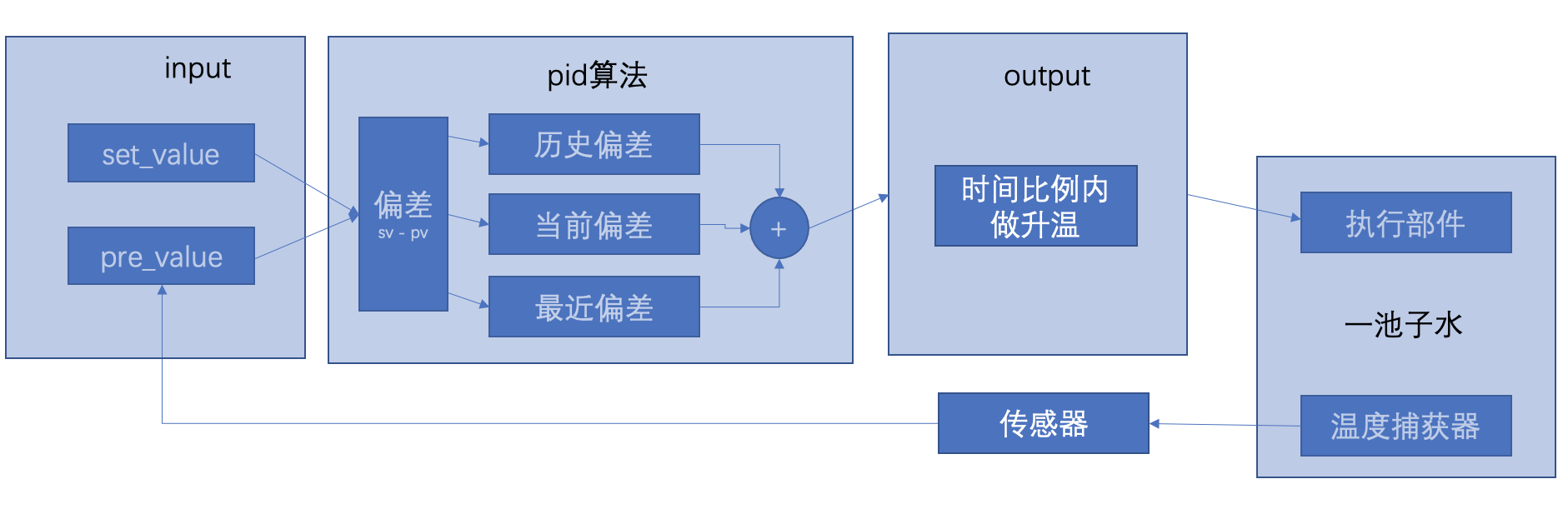
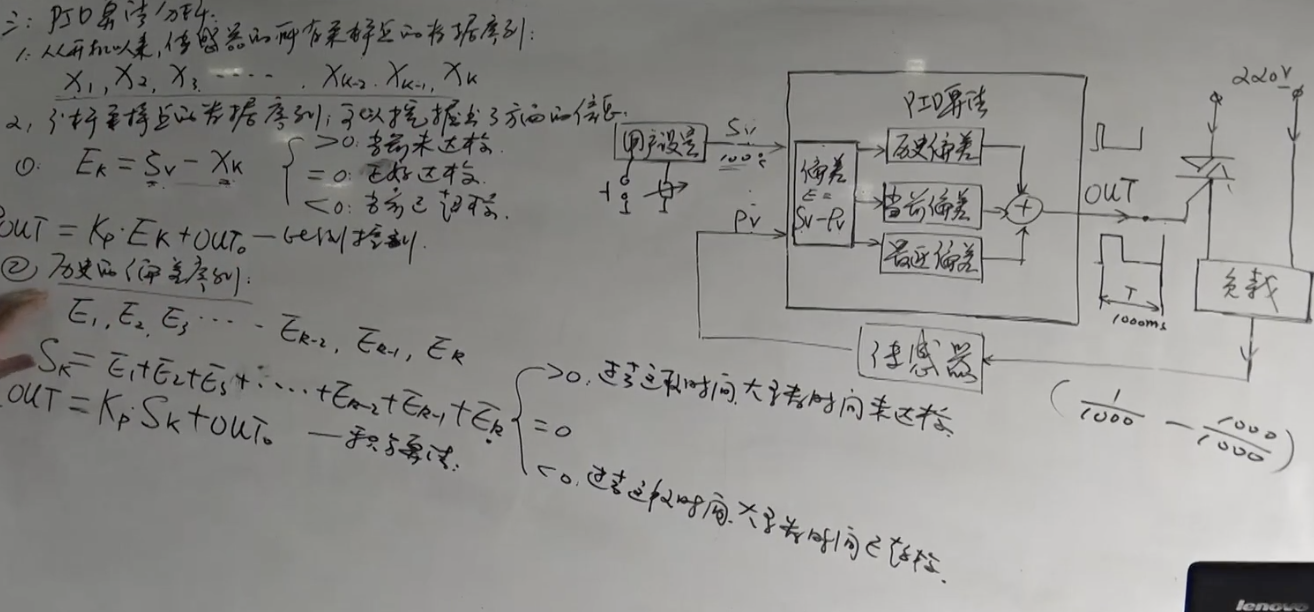
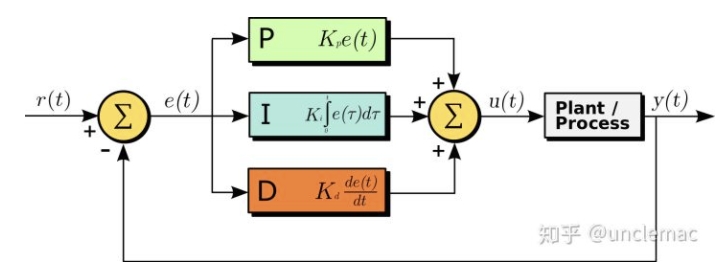
二,pid算法
优化位式算法,产生pid算法
pid算法特点
1. 输入:比位式算法,增加了对过往历史的考虑
2. 输出:对输出做平滑处理
思想:不仅参考当前状态,也要考虑历史状态,还要观察最近状态
参考:https://zhuanlan.zhihu.com/p/168751613?utm_source=qq