| 博客班级 | AHPU机器学习 |
|---|---|
| 作业要求 | 作业要求 |
| 作业目标 | 熟练掌握代码编写 |
| 学号 | 3180701209 |
一.实验目的
1.理解K-近邻算法原理,能实现算法K近邻算法;
2.掌握常见的距离度量方法;
3.掌握K近邻树实现算法;
4.针对特定应用场景及数据,能应用K近邻解决实际问题。
二.实验内容
1.实现曼哈顿距离、欧氏距离、闵式距离算法,并测试算法正确性。
2.实现K近邻树算法;
3.针对iris数据集,应用sklearn的K近邻算法进行类别预测。
4.针对iris数据集,编制程序使用K近邻树进行类别预测。
三、实验报告要求
1.对照实验内容,撰写实验过程、算法及测试结果;
2.代码规范化:命名规则、注释;
3.分析核心算法的复杂度;
4.查阅文献,讨论K近邻的优缺点;
5.举例说明K近邻的应用场景。
四.实验过程及结果
实验代码及注释
(1)、
//导入数据
import math
from itertools import combinations
(2)、
def L(x, y, p=2):
# x1 = [1, 1], x2 = [5,1]
if len(x) == len(y) and len(x) > 1:
sum = 0
for i in range(len(x)):
sum += math.pow(abs(x[i] - y[i]), p)
return math.pow(sum, 1/p)
else:
return 0
(3)、
x1 = [1, 1]
x2 = [5, 1]
x3 = [4, 4]
(4)、
# x1, x2
for i in range(1, 5):
r = { '1-{}'.format(c):L(x1, c, p=i) for c in [x2, x3]}
print(min(zip(r.values(), r.keys())))
输出结果:

(5)、
//导入numpy和pandas库
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
%matplotlib inline
from sklearn.datasets import load_iris
from sklearn.model_selection import train_test_split
from collections import Counter
(6)、
iris = load_iris()
df = pd.DataFrame(iris.data, columns=iris.feature_names)
df['label'] = iris.target
df.columns = ['sepal length', 'sepal width', 'petal length', 'petal width', 'label']
# data = np.array(df.iloc[:100, [0, 1, -1]])
(7)、
df # 将建好的表显示在屏幕上查看

(8)、
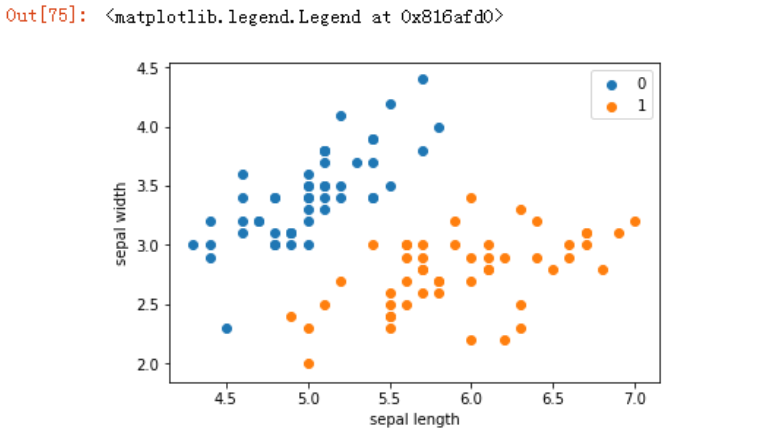
# 绘制数据散点图
plt.scatter(df[:50]['sepal length'], df[:50]['sepal width'], label='0') # 绘制前50个数据的散点图
plt.scatter(df[50:100]['sepal length'], df[50:100]['sepal width'], label='1') # 绘制50-100个数据的散点图
plt.xlabel('sepal length')
plt.ylabel('sepal width') # 设置x,y轴坐标名
plt.legend() # 绘图
(9)、
data = np.array(df.iloc[:100, [0, 1, -1]])
X, y = data[:,:-1], data[:,-1]
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2)
(10)、绘制模型图像,定义一些基本的信息
# 建立一个类KNN,用于k-近邻的计算
class KNN:
#初始化
def __init__(self, X_train, y_train, n_neighbors=3, p=2): # 初始化数据,neighbor表示邻近点,p为欧氏距离
self.n = n_neighbors
self.p = p
self.X_train = X_train
self.y_train = y_train
def predict(self, X):
# 取出n个点,放入空的列表,列表中存放预测点与训练集点的距离及其对应标签
knn_list = []
for i in range(self.n): # 遍历邻近点
dist = np.linalg.norm(X - self.X_train[i], ord=self.p) # 计算训练集和测试集之间的距离
knn_list.append((dist, self.y_train[i]))
#再取出训练集剩下的点,然后与n_neighbor个点比较大叫,将距离大的点更新
#保证knn_list列表中的点是距离最小的点
for i in range(self.n, len(self.X_train)):
'''此处 max(num,key=lambda x: x[0])用法:
x:x[]字母可以随意修改,求最大值方式按照中括号[]里面的维度,
[0]按照第一维,
[1]按照第二维
'''
max_index = knn_list.index(max(knn_list, key=lambda x: x[0])) # 找出列表中距离最大的点
dist = np.linalg.norm(X - self.X_train[i], ord=self.p) # 计算训练集和测试集之间的距离
if knn_list[max_index][0] > dist: # 若当前数据的距离大于之前得出的距离,就将数值替换
knn_list[max_index] = (dist, self.y_train[i])
# 统计
knn = [k[-1] for k in knn_list]
count_pairs = Counter(knn) # 统计标签的个数
max_count = sorted(count_pairs, key=lambda x:x)[-1] # 将标签升序排列
return max_count
# 计算测试算法的正确率
def score(self, X_test, y_test):
right_count = 0
n = 10
for X, y in zip(X_test, y_test):
label = self.predict(X)
if label == y:
right_count += 1
return right_count / len(X_test)
(11)、
clf = KNN(X_train, y_train)
(12)、
clf.score(X_test, y_test)# 计算正确率

(13)、
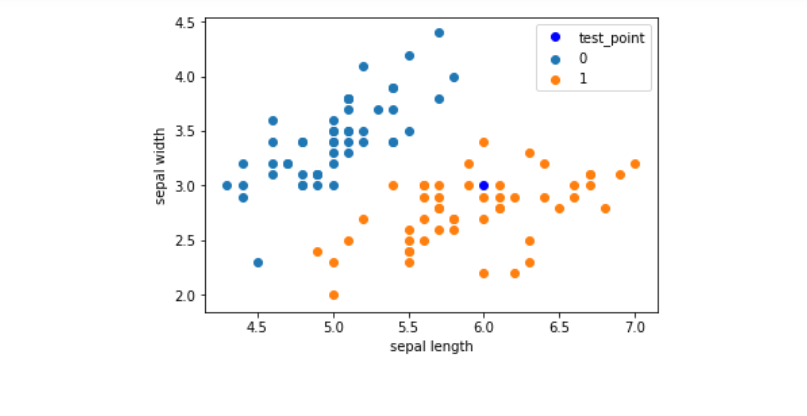
test_point = [6.0, 3.0]
print('Test Point: {}'.format(clf.predict(test_point)))
(14)、
plt.scatter(df[:50]['sepal length'], df[:50]['sepal width'], label='0')
plt.scatter(df[50:100]['sepal length'], df[50:100]['sepal width'], label='1')
plt.plot(test_point[0], test_point[1], 'bo', label='test_point')
plt.xlabel('sepal length')
plt.ylabel('sepal width')
plt.legend()
(15)、
from sklearn.neighbors import KNeighborsClassifier
(16)、
clf = KNN(X_train, y_train)
(17)、
clf.score(X_test, y_test)
输出结果:

(18)、
# 建造kd树
# kd-tree每个结点中主要包含的数据结构如下
class KdNode(object):
def __init__(self, dom_elt, split, left, right):
self.dom_elt = dom_elt # k维向量节点(k维空间中的一个样本点)
self.split = split # 整数(进行分割维度的序号)
self.left = left # 该结点分割超平面左子空间构成的kd-tree
self.right = right # 该结点分割超平面右子空间构成的kd-tree
class KdTree(object):
def __init__(self, data):
k = len(data[0]) # 数据维度
def CreateNode(split, data_set): # 按第split维划分数据集exset创建KdNode
if not data_set: # 数据集为空
return None
# key参数的值为一个函数,此函数只有一个参数且返回一个值用来进行比较
# operator模块提供的itemgetter函数用于获取对象的哪些维的数据,参数为需要获取的数据在对象
#data_set.sort(key=itemgetter(split)) # 按要进行分割的那一维数据排序
data_set.sort(key=lambda x: x[split])
split_pos = len(data_set) // 2 # //为Python中的整数除法
median = data_set[split_pos] # 中位数分割点
split_next = (split + 1) % k # cycle coordinates
# 递归的创建kd树
return KdNode(median, split,
CreateNode(split_next, data_set[:split_pos]), # 创建左子树
CreateNode(split_next, data_set[split_pos + 1:])) # 创建右子树
self.root = CreateNode(0, data) # 从第0维分量开始构建kd树,返回根节点
# KDTree的前序遍历
def preorder(root):
print (root.dom_elt)
if root.left: # 节点不为空
preorder(root.left)
if root.right:
preorder(root.right)
(19)、
from math import sqrt
from collections import namedtuple
#定义一个namedtuple,分别存放最近坐标点、最近距离和访问过的节点数
result = namedtuple("Result_tuple", "nearest_point nearest_dist nodes_visited")
def find_nearest(tree, point):
k = len(point) # 数据维度
def travel(kd_node, target, max_dist):
if kd_node is None:
return result([0] * k, float("inf"), 0) # python中用float("inf")和float("-inf")表示正负
nodes_visited = 1
s = kd_node.split # 进行分割的维度
pivot = kd_node.dom_elt # 进行分割的“轴”
if target[s] <= pivot[s]: # 如果目标点第s维小于分割轴的对应值(目标离左子树更近)
nearer_node = kd_node.left # 下一个访问节点为左子树根节点
further_node = kd_node.right # 同时记录下右子树
else: # 目标离右子树更近
nearer_node = kd_node.right # 下一个访问节点为右子树根节点
further_node = kd_node.left
temp1 = travel(nearer_node, target, max_dist) # 进行遍历找到包含目标点的区域
nearest = temp1.nearest_point # 以此叶结点作为“当前最近点”
dist = temp1.nearest_dist # 更新最近距离
nodes_visited += temp1.nodes_visited
if dist < max_dist:
max_dist = dist # 最近点将在以目标点为球心,max_dist为半径的超球体内
temp_dist = abs(pivot[s] - target[s]) # 第s维上目标点与分割超平面的距离
if max_dist < temp_dist: # 判断超球体是否与超平面相交
return result(nearest, dist, nodes_visited) # 不相交则可以直接返回,不用继续判断
#----------------------------------------------------------------------
# 计算目标点与分割点的欧氏距离
temp_dist = sqrt(sum((p1 - p2) ** 2 for p1, p2 in zip(pivot, target)))
if temp_dist < dist: # 如果“更近”
nearest = pivot # 更新最近点
dist = temp_dist # 更新最近距离
max_dist = dist # 更新超球体半径
# 检查另一个子结点对应的区域是否有更近的点
temp2 = travel(further_node, target, max_dist)
nodes_visited += temp2.nodes_visited
if temp2.nearest_dist < dist: # 如果另一个子结点内存在更近距离
nearest = temp2.nearest_point # 更新最近点
dist = temp2.nearest_dist # 更新最近距离
return result(nearest, dist, nodes_visited)
return travel(tree.root, point, float("inf")) # 从根节点开始递归
(20)、
data = [[2,3],[5,4],[9,6],[4,7],[8,1],[7,2]]
kd = KdTree(data)
preorder(kd.root)
输出结果:

(21)、
from time import clock
from random import random
# 产生一个k维随机向量,每维分量值在0~1之间
def random_point(k):
return [random() for _ in range(k)]
# 产生n个k维随机向量
def random_points(k, n):
return [random_point(k) for _ in range(n)]
(22)、
ret = find_nearest(kd, [3,4.5])
print (ret)
(23)、
N = 400000
t0 = clock()
kd2 = KdTree(random_points(3, N)) # 构建包含四十万个3维空间样本点的kd树
ret2 = find_nearest(kd2, [0.1,0.5,0.8]) # 四十万个样本点中寻找离目标最近的点
t1 = clock()
print ("time: ",t1-t0, "s")
print (ret2)
输出结果:

五.实验小结
(1)psp表格
| psp2.1 | 任务内容 | 计划完成需要的时间(min) | 实际完成需要的时间(min) |
|---|---|---|---|
| Planning | 计划 | 100 | 80 |
| Development | 开发 | 200 | 250 |
| Analysis | 需求分析(包括学习新技术) | 20 | 40 |
| Design Spec | 生成设计文档 | 30 | 50 |
| Design Review | 设计复审 | 5 | 10 |
| Coding Standard | 代码规范 | 3 | 5 |
| Design | 具体设计 | 10 | 12 |
| Coding | 具体编码 | 80 | 90 |
| Code Review | 代码复审 | 60 | 70 |
| Test | 测试(自我测试,修改代码,提交修改) | 10 | 15 |
| Reporting | 报告 | 9 | 6 |
| Test Report | 测试报告 | 3 | 2 |
| Size Measurement | 计算工作量 | 3 | 2 |
| Postmortem & Process Improvement Plan | 事后总结,并提出过程改进计划 | 5 | 3 |
(2)心得和经验
了解、学到了很多知识,通过查阅书本、网上资料来理解理论知识。