In my original thinking, fx and fy, which are focus lenth of camera, is trivial. They play a role of just an actually non-sense part to the final output.
Today I test ORB-SLAM2 with my own video.
I inherit the kitti00-02.yaml config file. That means, I use their fx and fy.
It turns out Traking module not working correctly.
Then I do another test. I changed Tum1.yaml to different fx and fy values to check whether it matters.
Results are shocking. Tracking can be lost.
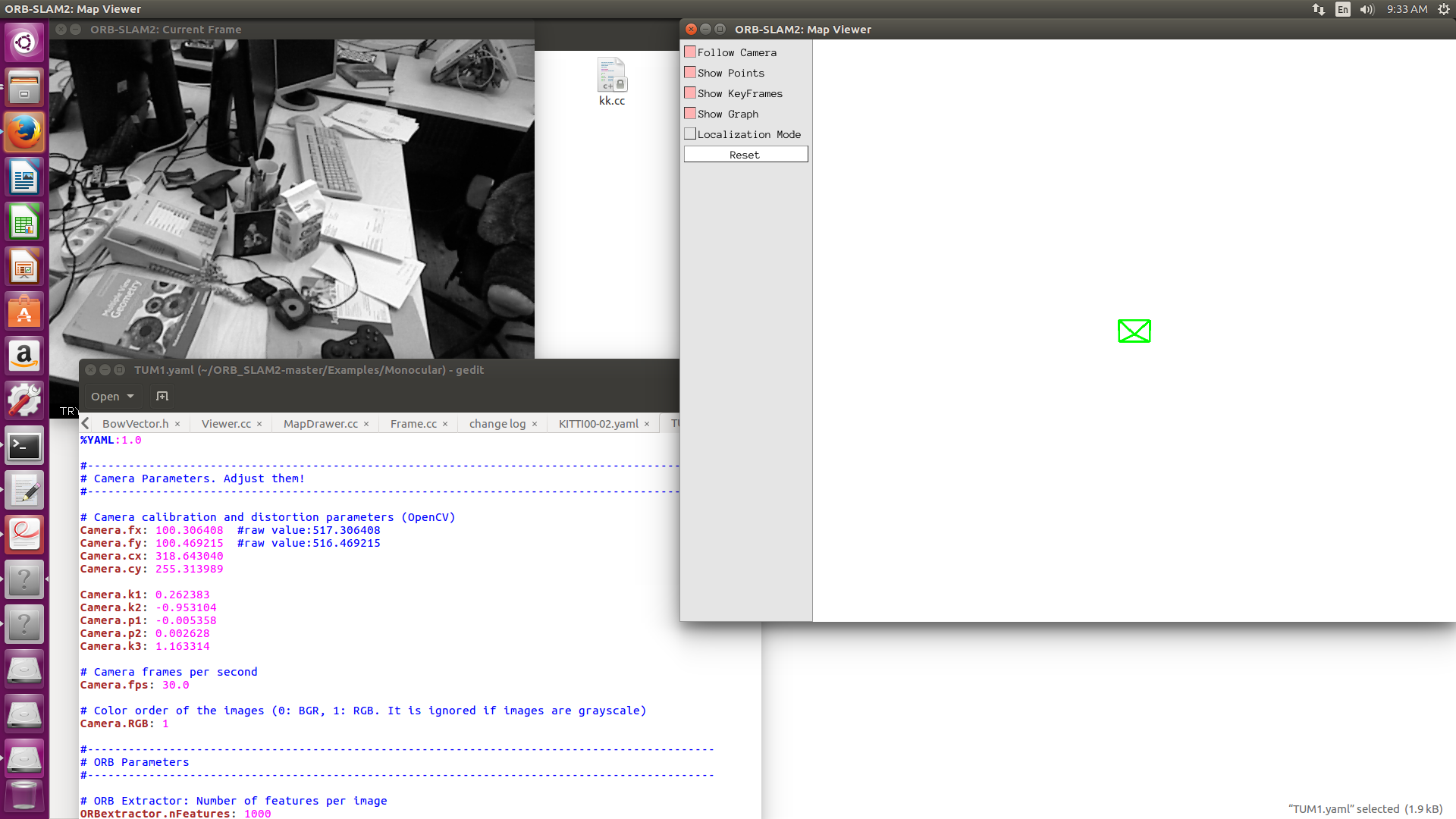
Here are the ScreenShot.
after change,
fx:100.306408 ( his raw values 517.306408)
fy:100.469215 (his raw values 516.469215)
Trajectory: Nothing out.
Then I test another change version. i.e., fx= 350.306408 fy=516.469215
Sometimes it tracks, sometimes it get lost. And the trajec is different from the origial.

Another puzzling phenomenon is that same setting, different output.
This time is this, next time it changes though fx and fy remain the same. Why
The same fx and fy as above. Traje Output is:
