1. 概述
https://www.cnblogs.com/onepixel/p/7674659.html
https://www.bilibili.com/video/av25136272
https://www.bilibili.com/video/av63851336

1.1 比较类排序
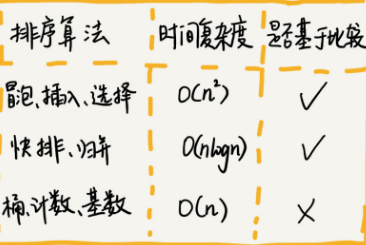
通过比较来决定元素间的相对次序,由于其时间复杂度不能突破O(nlogn),因此也称为非线性时间比较类排序。
包含初级排序O(n2) 冒泡、插入、选择,高级排序O(nLlogn)快排、归并;
高级语言中直接调系统自带的排序函数,可以传进去一个comparator,可以比较任何结构体或对象
1.2 非比较类排序
不通过比较来决定元素间的相对次序,它可以突破基于比较排序的时间下界,以线性时间运行,因此也称为线性时间非比较类排序。
包含O(n)桶、计数、基数排序等。
它的缺点是一般只能用于整型相关的数据类型,比如对于字符串或对象之间的排序就无能为力了。同时它一般要辅助用额外的内存空间。
1.3 各类排序算法复杂度的分析
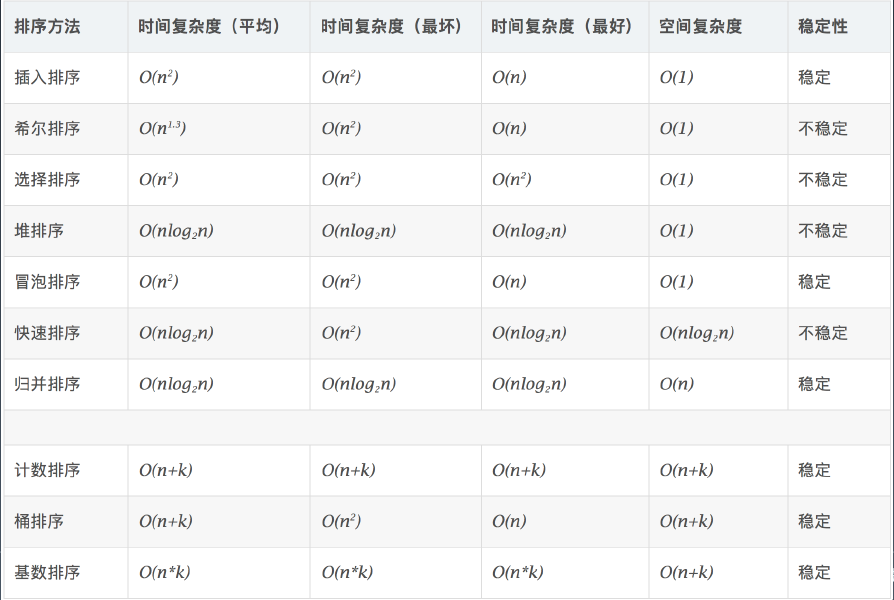
优先级:nlogn的排序,即堆排序、快速排序、归并排序。
1.4 如何分析一个排序算法
排序算法的执行效率
① 最好情况、最坏情况、平均情况时间复杂度(它们所对应要排序的原始数据是怎样的);
② 时间复杂度的系数、常数 、低阶(实际开发中排序规模较小,而时间复杂度反应的是数据规模 n 很大时候一个增长趋势会忽略系数、常数、低价,这时要把它们考虑进来);
③ 比较次数和交换(或移动)次数(基于比较的排序算法的执行过程,涉及的两种操作,一是元素比较大小,另一种是元素交换或移动);
平均时间复杂度就是加权平均期望时间复杂度,分析的时候要结合概率论的知识。还有一种思路,通过“有序度”和“逆序度”这两个概念来进行分析。
有序度是数组中具有有序关系的元素对的个数。有序元素对用数学表达式表示就是这样:有序元素对:a[i] <= a[j], 如果 i < j。
对于一个倒序排列的数组,比如 6,5,4,3,2,1,有序度是 0;对于一个完全有序的数组,比如 1,2,3,4,5,6,有序度就是n*(n-1)/2,也就是 15。我们把这种完全有序的数组的有序度叫作满有序度。
逆序度定义正好跟有序度相反(默认从小到大为有序),逆序元素对:a[i] > a[j], 如果 i < j。
逆序度 = 满有序度 - 有序度。我们排序的过程就是一种增加有序度,减少逆序度的过程,最后达到满有序度,就说明排序完成了。
排序算法的内存消耗
算法的内存消耗可以通过空间复杂度来衡量,针对排序算法的空间复杂度,还引入一个新的概念,原地排序(Sorted in place)算法,特指空间复杂度是 O(1) 的排序算法。
排序算法的稳定性
仅仅用执行效率和内存消耗来衡量排序算法的好坏是不够的。针对排序算法,还有一个重要的度量指标,稳定性。即如果待排序的序列中存在值相等的元素,经过排序之后,相等元素之间原有的先后顺序不变。
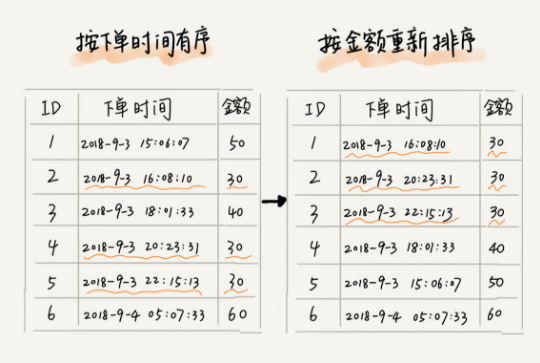
例如:现有 10 万条订单数据,希望按照金额从小到大对订单数据排序,对于金额相同的订单,按照下单时间从早到晚有序。
最先想到的方法是:先按照金额对订单数据进行排序,然后,再遍历排序之后的订单数据,对于每个金额相同的小区间再按下单时间排序。这种实现起来会很复杂。
借助稳定排序算法,这个问题可以非常简洁地解决。解决思路:先按下单时间给订单排序,不是金额。排序完成之后用稳定排序算法,按照订单金额重新排序。两遍排序之后,得到的订单数据就是按金额从小到大排序,金额相同的订单按下单时间从早到晚排序。
稳定排序算法可以保持金额相同的两个对象,在排序之后的前后顺序不变。
2. 初级排序 - O(n^2)
冒泡排序和插入排序的时间复杂度都是 O(n2),都是原地排序算法,但插入排序比冒泡排序更受欢迎。
冒泡排序不管怎么优化,元素交换的次数是一个固定值,是原始数据的逆序度。插入排序是同样的,不管怎么优化,元素移动的次数也等于原始数据的逆序度。
但是,从代码实现上来看,冒泡排序的数据交换要比插入排序的数据移动要复杂,冒泡排序需要 3 个赋值操作,而插入排序只需要 1 个。
//冒泡排序中数据的交换操作:
if(a[j]>a[j+1]) { // 交换
int tmp = a[j];
a[j] = a[j + 1];
a[j + 1] = tmp;
flag = true;
}
//插入排序中数据的移动操作:
if(a[j]>value) {
a[j + 1] = a[j]; // 数据移动
} else {
break;
}
用冒泡排序,每次需要 3 个赋值语句,所以交换操作总耗时就是 3*K 单位时间。而插入排序中数据移动操作只需要 K 个单位时间。
虽然冒泡排序和插入排序在时间复杂度上是一样的,都是 O(n2),但是如果我们希望把性能优化做到极致,那肯定首选插入排序。插入排序的算法思路也有很大的优化空间
2.1 冒泡排序(Bubble Sort)
冒泡排序只会操作相邻的两个数据。每次冒泡操作都会对相邻的两个元素进行比较,看是否满足大小关系要求。如果不满足就让它俩互换。一次冒泡会让至少一个元素移动到它应该在的位置,重复 n 次,就完成了 n 个数据的排序工作。
嵌套循环,每次查看相邻的元素如果逆序,则交换。
// 冒泡排序,a 表示数组,n 表示数组大小
public void bubbleSort(int[] a, int n) {
if (n <= 1) return;
for (int i = 0; i < n; ++i) {
// 提前退出冒泡循环的标志位
boolean flag = false;
for (int j = 0; j < n - i - 1; ++j) {
if (a[j] > a[j+1]) { // 交换
int tmp = a[j];
a[j] = a[j+1];
a[j+1] = tmp;
flag = true; // 表示有数据交换
}
}
if (!flag) break; // 没有数据交换,提前退出
}
}
冒泡的过程只涉及相邻数据的交换操作,只需要常量级的临时空间,所以它的空间复杂度为 O(1),是一个原地排序算法。
在冒泡排序中,只有交换才可以改变两个元素的前后顺序。为了保证冒泡排序算法的稳定性,当有相邻的两个元素大小相等的时候,不做交换,相同大小的数据在排序前后不会改变顺序,所以冒泡排序是稳定的排序算法;
最好情况下,要排序的数据已经是有序的了,我们只需要进行一次冒泡操作,就可以结束了,所以最好情况时间复杂度是 O(n)。而最坏的情况是,要排序的数据刚好是倒序排列的,我们需要进行 n 次冒泡操作,所以最坏情况时间复杂度为 O(n2)。
对于包含 n 个数据的数组进行冒泡排序,平均交换次数是多少呢?最坏情况下,初始状态的有序度是 0,所以要进行 n*(n-1)/2 次交换。最好情况下,初始状态的有序度是 n*(n-1)/2,就不需要进行交换。取个中间值 n*(n-1)/4,来表示初始有序度既不是很高也不是很低的平均情况。
即平均情况下,需要 n*(n-1)/4 次交换操作,比较操作肯定要比交换操作多,而复杂度的上限是 O(n2),所以平均情况下的时间复杂度就是 O(n2)。
这个平均时间复杂度推导过程其实并不严格,但是很多时候很实用。
2.2 插入排序(Insertion Sort)
从前到后逐步构建有序序列;对于未排序数据,在已排序序列中从后向前扫描,找到相应位置并插入。
public static void insertionSort(int[] nums, int n) {
if (n <= 1) return;
for (int i = 1; i < n; i++) {
int value = nums[i];
int j = i - 1;
//查找插入位置, 如果前边的数 < value, 说明是有序的继续遍历下一个value
for (; j >= 0; j--) {
if (nums[j] > value) {
nums[j + 1] = nums[j];//数据移动, 第j + 1 和 j 位赋相同的值, 最后再还原为value 值
} else
break;// num[j] < value, 结束循环
}
nums[j + 1] = value;//插入数据, 还原为value 值
}
}
}
插入排序算法的运行并不需要额外的存储空间,所以空间复杂度是 O(1),也就是说,这是一个原地排序算法。
在插入排序中,对于值相同的元素,我们可以选择将后面出现的元素,插入到前面出现元素的后面,这样就可以保持原有的前后顺序不变,所以插入排序是稳定的排序算法。
如果排序的数据是有序的,并不需搬移任何数据,从尾到头在有序数据组里面查找插入位置,每次只需要比较一个数据就能确定插入的位置。最好是时间复杂度为 O(n)。
如果数组是倒序的,每次插入都相当于在数组的第一个位置插入新的数据,所以需要移动大量的数据,最坏情况时间复杂度为 O(n2)。
在数组中插入一个数据的平均时间复杂度是 O(n)。所以,对于插入排序来说,每次插入操作都相当于在数组中插入一个数据,循环执行 n 次插入操作,所以平均时间复杂度为 O(n2)。
2.3 选择排序(Selection Sort)
每次找最小值,然后放到待排序数组的起始位置。
public static void selectionSort(int[] nums, int n) {
if (n <= 1) return;
for (int i = 0; i < n - 1; i++) {
//查找最小值 的下标 index
int minIndex = i;
for (int j = i + 1; j < n; j++) {
if (nums[j] < nums[minIndex]) {
minIndex = j;
}
}
//交换
int tmp = nums[i];
nums[i] = nums[minIndex];
nums[minIndex] = tmp;
}
}
选择排序空间复杂度为 O(1),是一种原地排序算法。选择排序的最好情况时间复杂度、最坏情况和平均情况时间复杂度都为 O(n2)。
选择排序是一种不稳定的排序算法。选择排序每次都要找剩余未排序元素中的最小值,并和前面的元素交换位置,这样破坏了稳定性。
5,8,5,2,9 这样一组数据,使用选择排序算法来排序的话,第一次找到最小元素 2,与第一个 5 交换位置,那第一个 5 和中间的 5 顺序就变了,所以就不稳定了。正是因此,相对于冒泡排序和插入排序,选择排序就稍微逊色了。
特定算法是依赖特定的数据结构的。上边这几种排序算法,都是基于数组实现的。如果数据存储在链表中,这三种排序算法还能工作吗?如果能,那相应的时间、空间复杂度又是多少呢?
前提条件是是否允许修改链表的节点value值,还是只能改变节点的位置。
一般而言,考虑只能改变节点位置,冒泡排序相比于数组实现,比较次数一致,但交换时操作更复杂;
插入排序,比较次数一致,不需要再有后移操作,找到位置后可以直接插入,但排序完毕后可能需要倒置链表;
选择排序比较次数一致,交换操作同样比较麻烦。
综上,时间复杂度和空间复杂度并无明显变化,若追求极致性能,冒泡排序的时间复杂度系数会变大,插入排序系数会减小,选择排序无明显变化。
冒泡、插入、选择排序都有一个共同点,将待排序数列分为已排序和未排序两部分。在未排序的部分中查找一个最值,放到已排序数列的恰当位置。
具体到代码层面,外层循环的变量用于分割已排序和未排序数,内层循环的变量用于在未排序数中查找。
3. 高级排序 - O(nLogn)
冒泡排序、插入排序、选择排序这三种排序算法,它们的时间复杂度都是 O(n2),比较高,适合小规模数据的排序;
归并排序和快速排序,这两种排序算法适合大规模的数据排序,时间复杂度为 O(nlogn) ,都用到了分治思想。
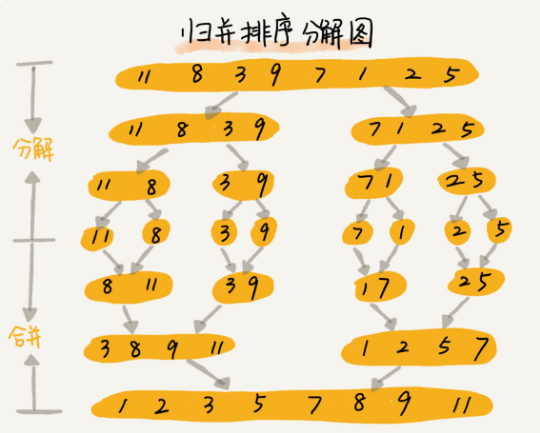
3.1 归并排序(Merge Sort)— 分治
1. 把长度为n的输入序列分成两个长度为n/2的子序列;
2. 对这两个子序列分别采用归并排序;
3. 将两个排序好的子序列合并成一个最终的排序序列。
public static void mergeSort(int[] array, int left, int right) {
//1. 递归终止条件
if (left >= right) return;
int mid = (left + right) >> 1;
//2. 分治递归
mergeSort(array, left, mid);
mergeSort(array, mid + 1, right);
//3. 将array[left, mid]和 array[mid + 1, right] 合并为 array[left, right]
merge(array, left, mid, right);
}
private static void merge(int[] array, int left, int mid, int right) {
//临时缓存 数组
int[] temp = new int[right - left + 1];
//mid中间下标, i -> mid 往左遍历, mid -> right 往右遍历; i, j分别指向array[left, mid] 和 array[mid+1, right] 的第一个元素
int i = left, j = mid + 1, k = 0;
while (i <= mid && j <= right) {
temp[k++] = array[i] <= array[j] ? array[i++] : array[j++];
}
while (i <= mid)
temp[k++] = array[i++];
while (j <= right)
temp[k++] = array[j++];
//把临时数组temp中数组拷贝到原数组中。
for (int p = 0; p < temp.length; p++) {
array[left + p] = temp[p];
}
// 也可以⽤ System.arraycopy(a, start1, b, start2, length)
}
归并排序使用分治思想。分治,就是分而治之,将一个大问题分解成小的子问题来解决。小的子问题解决了,大问题也就解决了。
分治思想跟递归思想很像,分治算法一般都是用递归来实现的。分治是一种解决问题的处理思想,递归是一种编程技巧。
归并排序的递推公式:
递推公式:
mergeSort(left, right) = merge( mergeSort(left, mid), mergeSort(mid+1, right) )
终止条件:
left >= right 不用再继续分解
mergeSort( left, right ) 表示,给下标从 left 到 right 之间的数组排序。
将这个排序问题转化为两个子问题: mergeSort( left, mid) 和 mergeSort( mid + 1, right ),其中下标 mid 等于 left 和 right 的中间位置,也就是 ( left + right ) / 2。
当下标从 left 到 mid 和从 mid + 1 到 right 这两个子数组都排好序之后,我们再将两个有序的子数组合并在一起,这样下标从 left 到 right 之间的数据就也排好序了。
归并排序稳不稳定关键要看 merge() 函数,也就是两个有序子数组合并成一个有序数组的那部分代码。
在合并的过程中,如果 array[ left, mid ] 和 array[ mid + 1, right ] 之间有值相同的元素,可先把 array[ left, mid ] 中的元素放入 tmp 数组。这样就保证了值相同的元素,在合并前后的先后顺序不变。所以,归并排序是一个稳定的排序算法。
时间复杂度:
定义求解问题 a 的时间是 T(a),求解问题 b、c 的时间分别是 T(b) 和 T( c),得到一递推关系式:
T(a) = T(b) + T(c) + K, 其中 K 等于将两个子问题 b、c 的结果合并成问题 a 的结果所消耗的时间。
结论:不仅递归求解的问题可以写成递推公式,递归代码的时间复杂度也可以写成递推公式。
套用这个公式,分析归并排序的时间复杂度。
假设对 n 个元素进行归并排序需要的时间是 T(n),那分解成两个子数组排序的时间都是 T(n/2)。我们知道,merge() 函数合并两个有序子数组的时间复杂度是 O(n)。
1)T(1) = C; n=1 时,只需要常量级的执行时间,所以表示为 C。
2)T(n) = 2*T(n/2) + n; n>1
T(n) = 2*T(n/2) + n
= 2*(2*T(n/4) + n/2) + n = 4*T(n/4) + 2*n
= 4*(2*T(n/8) + n/4) + 2*n = 8*T(n/8) + 3*n
= 8*(2*T(n/16) + n/8) + 3*n = 16*T(n/16) + 4*n
......
= 2k * T(n/2k) + k * n
一步一步分解推导,我们可以得到 T(n) = 2k T(n/2k)+kn。当 T(n/2k)=T(1) 时,也就是 n/2k=1,我们得到 k=log2n 。我们将 k 值代入上面的公式,得到 T(n)=Cn+nlog2n 。
用大 O 标记法来表示的话,T(n) 就等于 O(nlogn)。所以归并排序的时间复杂度是 O(nlogn)。
原理分析和伪代码可以看出,归并排序的执行效率与要排序的原始数组的有序程度无关,所以其时间复杂度是非常稳定的,不管是最好情况、最坏情况,还是平均情况,时间复杂度都是 O(nlogn)。
时间复杂度是非常稳定的,最好情况、最坏情况,平均情况,时间复杂度都是 O(nlogn);
空间复杂度:
归并排序并没有像快排应用广泛,因为它有一个致命的“弱点”,即归并排序不是原地排序算法。因为归并排序的合并函数,在合并两个有序数组为一个有序数组时,需要借助额外的存储空间。 尽管每次合并操作都需要申请额外的内存空间,但在合并完成之后,临时开辟的内存空间就被释放掉了。在任意时刻,CPU 只会有一个函数在执行,也就只会有一个临时的内存空间在使用。临时内存空间最大也不会超过 n 个数据的大小,所以空间复杂度是 O(n)。
3.2 快速排序(Quick Sort)
快排利用的也是分治思想,快排思想:
如果要排序数组中下标从 begin 到 right 之间的一组数据,我们选择 begin 到 right 之间的任意一个数据作为 pivot(分区点)。
我们遍历 begin 到 right 之间的数据,将小于 pivot 的放到左边,将大于 pivot 的放到右边,将 pivot 放到中间。经过这一步骤之后,数组 begin 到 right 之间的数据就被分成了三个部分,
前面 begin 到 mid - 1 之间都是小于 pivot 的,中间是 pivot,后面的 mid + 1 到 right 之间是大于 pivot 的。,然后依次对右边和右边的子数组继续快排;以达到整个序列有序。
public static void quickSort(int[] array, int begin, int end) {
if (begin >= end) return;
int pivot = partition(array, begin, end); //返回 counter 个数 (中间值左边数组 或者 右边数组的个数)
quickSort(array, begin, pivot - 1); //递归左边的值
quickSort(array, pivot + 1, end); //递归右边的值
}
private static int partition(int[] array, int begin, int end) {
// pivot: 标杆位置, counter: ⼩于pivot的元素的个数, 从左往右即从小到大计数
int pivot = end, counter = begin;
//1. 把小于 array[pivot] 的元素依次放数组左边,
for (int i = begin; i < end; i++) {
if (array[i] < array[pivot]) {
int temp = array[counter];
array[counter] = array[i];
array[i] = temp;
counter++;
}
}
//2. 将 array[pivot] 的值中间, 左边 < array[pivot] < 右边
int temp = array[pivot];
array[pivot] = array[counter];
array[counter] = temp;
return counter;
}
快排是一种原地、不稳定的排序算法
时间复杂度分析:
T(1) = C; n=1 时,只需要常量级的执行时间,所以表示为 C。
T(n) = 2*T(n/2) + n; n>1
T(1) = C; n=1 时,只需要常量级的执行时间,所以表示为 C。
T(n) = T(n/10) + T(9*n/10) + n; n>1
分治和快排区别:
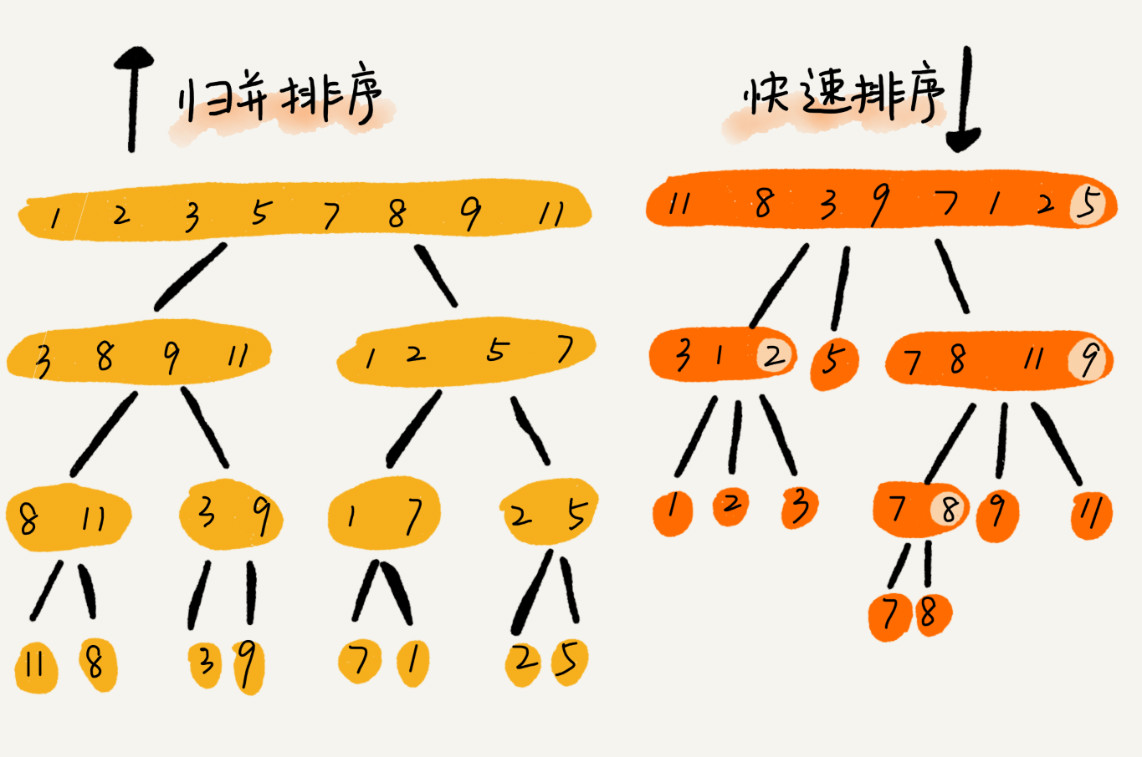
归并排序的处理过程是由下到上的,先处理子问题,然后再合并。而快排正好相反,它的处理过程是由上到下的,先分区,然后再处理子问题。
归并排序虽然是稳定的、时间复杂度为 O(nlogn) 的排序算法,但是它是非原地排序算法。
归并之所以是非原地排序算法,主要原因是合并函数无法在原地执行。快速排序通过设计巧妙的原地分区函数,可以实现原地排序,解决了归并排序占用太多内存的问题。
归并:先排序左右子数组,然后合并两个有序子数组
快排:先调配出左右子数组,然后对于左右子数组进行排序
3.3 堆排序(Heap Sort) — 堆插入 O(logN),取最大/小值 O(1)
1. 数组元素依次建立小顶堆
2. 依次取堆顶元素,并删除
C++:


void heap_sort(int a[], int len) { priority_queue<int, vector<int>, greater<int>> q; for (int i = 0; i < len; i++) { q.push(a[i]); } for (int i = 0; i < len; i++) { a[i] = q.pop(); } }
Java:
static void heapify(int[] array, int length, int i) {
int left = 2 * i + 1, right = 2 * i + 2;
int largest = i;
if (left < length && array[left] > array[largest]) {
largest = leftChild;
}
if (right < length && array[right] > array[largest]) {
largest = right;
}
if (largest != i) {
int temp = array[i];
array[i] = array[largest];
array[largest] = temp;
heapify(array, length, largest);
}
}
public static void heapSort(int[] array) {
if (array.length == 0) return;
int length = array.length;
for (int i = length / 2 - 1; i >= 0; i -)
heapify(array, length, i);
for (int i = length - 1; i >= 0; i--) {
int temp = array[0];
array[0] = array[i];
array[i] = temp;
heapify(array, i, 0);
}
}
4. 线性排序(Linear sort)- O(n)
桶排序、计数排序、基数排序,这些排序算法的时间复杂度是线性的,所以把这类排序算法叫作线性排序(Linear sort)。之所以能做到线性的时间复杂度,主要原因是,这三个算法是非基于比较的排序算法,都不涉及元素之间的比较操作。
但这三种排序对要排序的数据要求很苛刻。
4.1 桶排序(Bucket Sort)
桶排序 (Bucket sort)的工作的原理:假设输入数据服从均匀分布,将数据分到有限数量的桶里,每个桶再分别排序(有可能再使用别的排序算法或是以递归方式继续使用桶排序进行排)。
桶排序,核心思想是将要排序的数据分到几个有序的桶里,每个桶里的数据再单独进行排序。桶内排完序之后,再把每个桶里的数据按照顺序依次取出,组成的序列就是有序的了。
桶排序的时间复杂度:
如果要排序的数据有 n 个,我们把它们均匀地划分到 m 个桶内,每个桶里就有 k=n/m 个元素。每个桶内部使用快速排序,时间复杂度为 O(k * logk)。
m 个桶排序的时间复杂度就是 O(m * k * logk),因为 k=n/m,所以整个桶排序的时间复杂度就是 O(n*log(n/m))。当桶的个数 m 接近数据个数 n 时,log(n/m) 就是一个非常小的常量,这个时候桶排序的时间复杂度接近 O(n)。
桶排序对要排序数据的要求是非常苛刻的:
首先,要排序的数据需要很容易就能划分成 m 个桶,并且,桶与桶之间有着天然的大小顺序。这样每个桶内的数据都排序完之后,桶与桶之间的数据不需要再进行排序。
其次,数据在各个桶之间的分布是比较均匀的。如果数据经过桶的划分之后,有些桶里的数据非常多,有些非常少,很不平均,那桶内数据排序的时间复杂度就不是常量级了。在极端情况下,如果数据都被划分到一个桶里,那就退化为 O(nlogn) 的排序算法了。
桶排序比较适合用在外部排序中。所谓的外部排序就是数据存储在外部磁盘中,数据量比较大,内存有限,无法将数据全部加载到内存中。
比如说我们有 10GB 的订单数据,我们希望按订单金额(假设金额都是正整数)进行排序,但是我们的内存有限,只有几百 MB,没办法一次性把 10GB 的数据都加载到内存中。
4.2 计数排序(Counting Sort)
计数排序要求输入的数据必须是有确定范围的整数。将输入的数据值转化为键存储在额外开辟的数组空间中;然后依次把计数大于 1 的填充回原数组
计数排序其实是桶排序的一种特殊情况。当要排序的 n 个数据,所处的范围并不大的时候,比如最大值是 k,我们就可以把数据划分成 k 个桶。每个桶内的数据值都是相同的,省掉了桶内排序的时间。
4.3 基数排序(Radix Sort)
基数排序是按照低位先排序,然后收集;再按照高位排序,然后再收集;依次类推,直到最高位。有时候有些属性是有优先级顺序的,先按低优先级排序,再按高优先级排序。