一,Linux 的虚拟内存管理的几个关键概念:
1、每个进程都有独立的虚拟地址空间,进程访问的虚拟地址并不是真正的物理地址;
2、虚拟地址可通过每个进程上的页表(在每个进程的内核虚拟地址空间)与物理地址进行映射,获得真正物理地址;
3、如果虚拟地址对应物理地址不在物理内存中,则产生缺页中断,真正分配物理地址,同时更新进程的页表;如果此时物理内存已耗尽,则根据内存替换算法淘汰部分页面至物理磁盘中。
基于以上认识,进行了如下分析:
二、Linux 虚拟地址空间如何分布?
Linux 使用虚拟地址空间,大大增加了进程的寻址空间,由低地址到高地址分别为:
1、只读段:也称之为静态存储区域,该部分空间只能读,不可写;内存在程序编译的时候就已经分配好,这块内存在程序的整个运行期间都存在。(包括:代码段、rodata 段(C常量字符串和#define定义的常量) )
2、数据段:保存全局变量、静态变量的空间;
3、堆 :就是平时所说的动态内存, malloc/new 大部分都来源于此。其中堆顶的位置可通过函数 brk 和 sbrk 进行动态调整。
4、文件映射区域 :如动态库(例如libc-2.2.93.so)、共享内存等映射物理空间的内存,一般是 mmap 函数所分配的虚拟地址空间。
5、栈:用于维护函数调用的上下文空间,一般为 8M ,可通过 ulimit –s 查看。
在执行函数时,函数内局部变量的存储单元都可以在栈上创建,函数执行结束时这些存储单元自动被释放。栈内存分配运算内置于处理器的指令集中,效率很高,但是分配的内存容量有限。
6、内核虚拟空间:用户代码不可见的内存区域,由内核管理(页表就存放在内核虚拟空间)。
下图是 32 位系统典型的虚拟地址空间分布(来自《深入理解计算机系统》)。
32 位系统有4G 的地址空间::
其中 0x08048000~0xbfffffff 是用户空间,0xc0000000~0xffffffff 是内核空间,包括内核代码和数据、与进程相关的数据结构(如页表、内核栈)等。
栈指针:%esp 执行栈顶,往低地址方向变化;
brk/sbrk 函数控制堆顶_edata往高地址方向变化。
三、缺页中断
malloc()和mmap()等内存分配函数,在分配时只是建立了进程虚拟地址空间,并没有分配虚拟内存对应的物理内存。
当进程访问这些没有建立映射关系的虚拟内存时,处理器自动触发一个缺页异常。
1,如何查看进程发生缺页中断的次数?
用ps -o majflt,minflt -C program命令查看。
majflt代表major fault,中文名叫大错误,minflt代表minor fault,中文名叫小错误。
这两个数值表示一个进程自启动以来所发生的缺页中断的次数。
2,发成缺页中断后,执行了那些操作?
当一个进程发生缺页中断的时候,进程会陷入内核态,执行以下操作:
1)、检查要访问的虚拟地址是否合法
2)、查找/分配一个物理页
3)、填充物理页内容(读取磁盘,或者直接置0,或者啥也不干)
4)、建立映射关系(虚拟地址到物理地址) 重新执行发生缺页中断的那条指令 如果第3步,需要读取磁盘,那么这次缺页中断就是majflt,否则就是minflt。
四,内存分配的原理
4.1,内存分配的两个系统函数:brk和mmap
从操作系统角度来看,进程分配内存有两种方式,分别由两个系统调用完成:brk和mmap(不考虑共享内存)。
1)、brk是将数据段(.data)的最高地址指针_edata往高地址推;
2)、mmap是在进程的虚拟地址空间中(堆和栈中间,称为文件映射区域的地方)找一块空闲的虚拟内存。
这两种方式分配的都是虚拟内存,没有分配物理内存。在第一次访问已分配的虚拟地址空间的时候,发生缺页中断,操作系统负责分配物理内存,然后建立虚拟内存和物理内存之间的映射关系。
在标准C库中,提供了malloc/free函数分配释放内存,这两个函数底层是由brk,mmap,munmap这些系统调用实现的。
4.2,下面以一个例子来说明内存分配的原理:
4.2.1 情况一、
malloc小于128k的内存,使用brk分配内存,将_edata往高地址推(只分配虚拟空间,不对应物理内存(因此没有初始化),第一次读/写数据时,引起内核缺页中断,内核才分配对应的物理内存,然后虚拟地址空间建立映射关系),如下图:
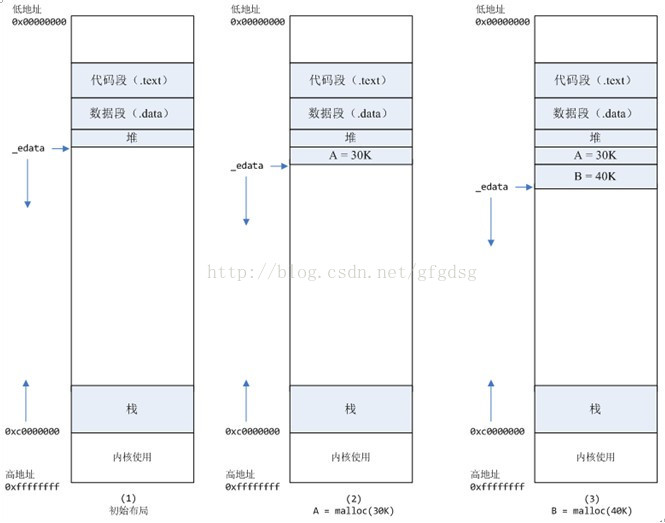
4.2.2 情况二
malloc大于128k的内存,使用mmap分配内存,在堆和栈之间找一块空闲内存分配(对应独立内存,而且初始化为0),如下图:
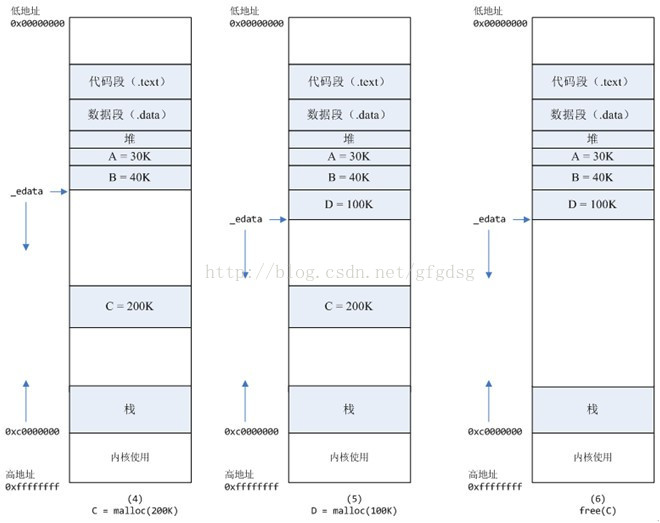
1)、进程调用C=malloc(200K)以后,内存空间如图4:
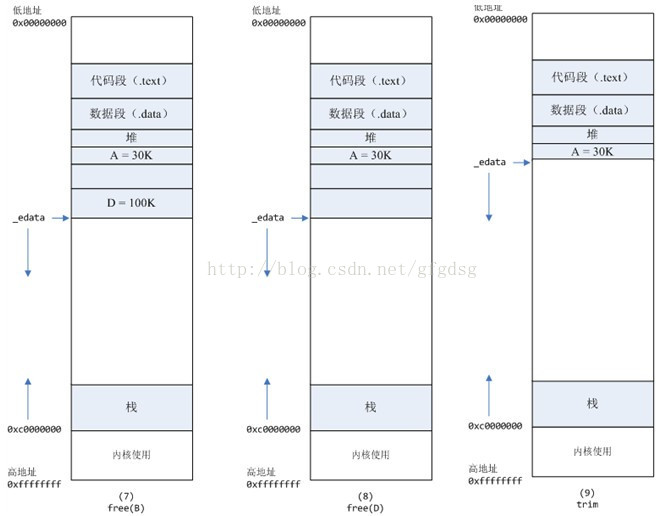
4),进程调用free(B)以后,如图7所示:
五、既然堆内内存brk和sbrk不能直接释放,为什么不全部使用 mmap 来分配,munmap直接释放呢?
既然堆内碎片不能直接释放,导致疑似“内存泄露”问题,为什么 malloc 不全部使用 mmap 来实现呢?(mmap分配的内存可以会通过 munmap 进行 free ,实现真正释放)而是仅仅对于大于 128k 的大块内存才使用 mmap ?
其实,进程向 OS 申请和释放地址空间的接口 sbrk/mmap/munmap 都是系统调用,频繁调用系统调用都比较消耗系统资源的。并且, mmap 申请的内存被 munmap 后,重新申请会产生更多的缺页中断。例如使用 mmap 分配 1M 空间,第一次调用产生了大量缺页中断 (1M/4K 次 ) ,当munmap 后再次分配 1M 空间,会再次产生大量缺页中断。缺页中断是内核行为,会导致内核态CPU消耗较大。另外,如果使用 mmap 分配小内存,会导致地址空间的分片更多,内核的管理负担更大。同时堆是一个连续空间,并且堆内碎片由于没有归还 OS ,如果可重用碎片,再次访问该内存很可能不需产生任何系统调用和缺页中断,这将大大降低 CPU 的消耗。 因此, glibc 的 malloc 实现中,充分考虑了 sbrk 和 mmap 行为上的差异及优缺点,默认分配大块内存 (128k) 才使用 mmap 获得地址空间,也可通过 mallopt(M_MMAP_THRESHOLD, <SIZE>) 来修改这个临界值。
六、C语言的内存分配方式与malloc
C语言跟内存申请相关的函数主要有 alloc,calloc,malloc,free,realloc,sbrk等.
6.1 _alloc
原型:void *_alloc(size_t size);
本函数与上述的两个函数不同,因为它是在栈上分配了size大小的内存,因此使用此函数分配的内存不用再担心内存释放的情况了。但是使用此函数需要注意的是:在函数内部使用此函数分配的内存随着函数的终结不复存在,因此不能将此函数分配的内存供函数外部使用。
6.2 malloc
原型:void * malloc(size_t size);
该函数将在堆上分配一个size byte大小的内存。它分配的单元完全按字节大小计算,因此如此分配N个单原的student_t,那么要这样实现:(stdent_t *)malloc(N * sizeof (student_t));
6.3 calloc
原型:void* calloc(size_t size, int count);
该函数解决了上面的函数的不足,它将分配count个size大小的单元,因此在便用此函数的时候就会很方便,比如对上面的例子就可以:(student_t *)calloc(sizeof(t_student), N)就可以了。这样使用就会很清晰的知道分配的内存是一种什么样的逻辑方式。
malloc与calloc没有本质区别,malloc之后的未初始化内存可以使用memset进行初始化。
6.4 realloc
是在malloc的基础上增加内存分配,free函数用来对分配在堆的内存进行释放以防内存泄漏的产生。
6.5 sbrk
是系统函数,用来向os申请数据段,供malloc,calloc及realloc申请使用。
6.6 New和delete
是c++中的运算符,调用malloc申请内存后初始化为对象,用delete释放。