这篇文章只是我学完四元数之后的一些理解,其实是对别人理解的理解,有些地方我理解但是没有写下来,如果真的想深入的学习四元数,建议从学习复数开始。
这个知识点需要几何想象的天赋和学习的耐心,缺一不可,慢慢啃不要急躁。
推荐几个学习的视频
- b站的四元数讲解 四元数的可视化
- 接上第二集四元数的可视化2
- 四元数的演示上面视频里的四元数交互图
第一个视频讲原理多一些,第二个视频会说一些旋转的具体计算,但你不看第一个肯定看不懂第二个【笑
在下面会简单的介绍一些原理和解析方面的东西,但是很多等式没有列出,需要再查找别的资料来学习。
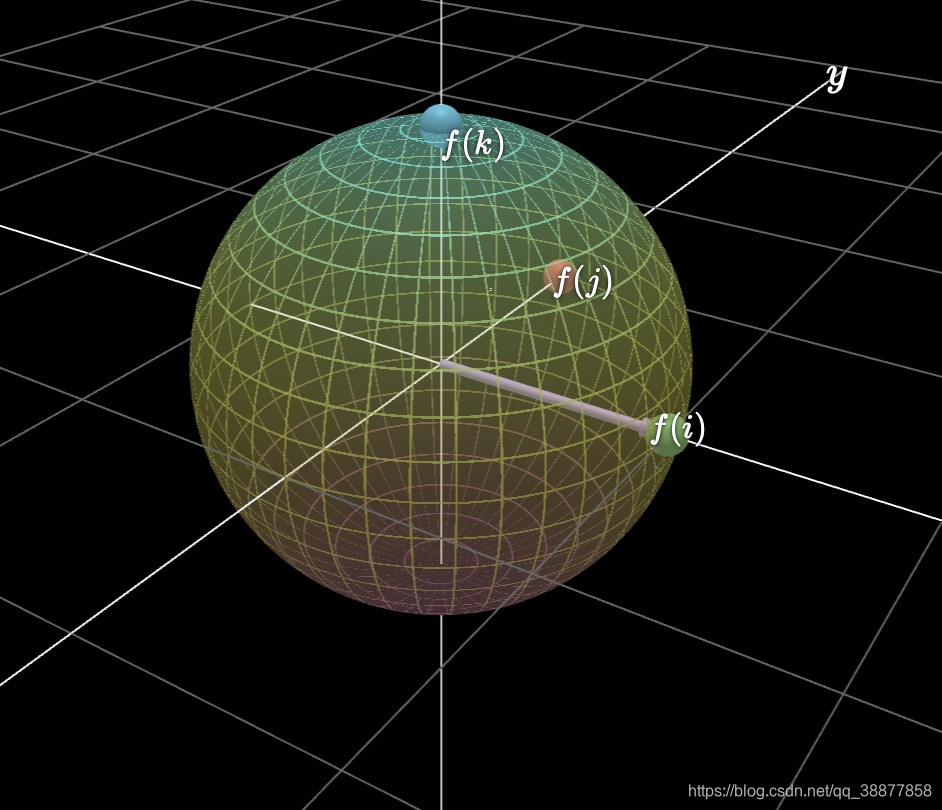
这是一个四元数在三维上的投影,他的方程如下
(其实原方程应该表示为p=w+xi+yj+zk 四维坐标就是(w, x, y, z)
我们可以看到x轴为1,在图上也有显示
在这个方程中我们需要知道的是:
- x²+y²+z²=1
- p是想要旋转的点,q是旋转的轴
- ijk前面的数字表示的是xyz轴
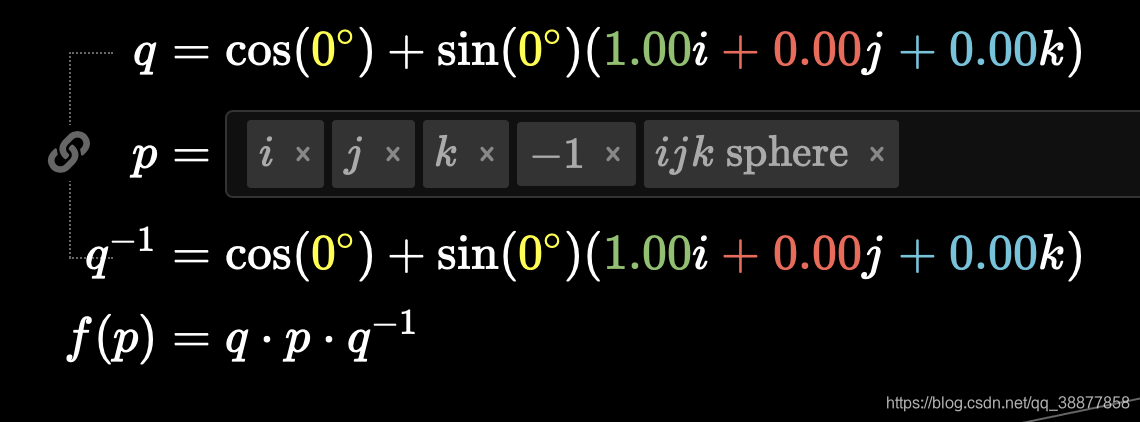
- 加号前面实部和后面的虚部分别用余弦和正弦来表示
- 旋转的角度在这里代入时使用的是半角,为什么是半角在后面解释
- ij=-ji=k, jk=-kj=i, ki=-ik=j ,这个也需要解释一下
在解释第四个问题之前还需要了解一个知识叫做:左乘右手定则,右乘左手定则。
根据图一我们可以知道ijk轴互相垂直,如果是ij=k,我们想让j轴上的点旋转90度,可以理解为i推动j变成了k,左乘用右手定则,让大拇指指向i的正轴,握住i轴按照剩下四指方向旋转90度,是不是将j轴上的点旋转到了k轴上了。
这个是右手定则,左手定则是右乘的时候使用的。
还是按照上面例子里的式子,ij=k,还是旋转90度,j右乘i得到k,使用左手,大拇指朝向j轴正方向,旋转90度,将i轴上的点旋转到了k轴上了。
按照左右手定则再结合球极投影,可以很快的记住是怎么旋转的。

四元数的有个定理,如上,所以我们知道可以如何旋转一个三维空间上的点,要解释为什么在旋转时使用半角,还需要解释为什么使用要qpq-1中为什么乘了一个四元数的共轭。
将其先进行P变化使其映射到新空间的另一个点
而这个点同一个线性变换时的矩阵是A然后再通过P逆使其映射回之前的空间
简单的说qp相乘之后p被拉到了四维空间中,为了让它能在三维空间中表示,乘以q逆将它拉回到三维空间中来,不知道这么解释对不对,我是这么理解的。qp之后p中的实部被转移到了虚部,为了让它回到实部,在乘以q逆可以将虚部转移到实部。
而半角就是因为旋转了两次,qp旋转了一次这是按照正轴旋转的,用右手定则来旋转,第二次旋转是(q*p)*q-1,是按照负轴来旋转的,用左手定则,由于是四元数的逆,所以虽然是用左手定则来旋转,但是和之前旋转的方向是一样的。
所以这里使用半角的原因就是前后一共旋转了两次。
右乘四元数的逆是为了降维。
半角是为了解决共轭方向第二次旋转的问题。

看到这其实大部分代码就已经能看懂了,下一篇写cocos2dx的代码注释。