Ubuntu 版本是14.04.5.(这个版本的ubuntu的内核是V4.4的内核,长期维护到2019年,是14代比较稳定的,反正用这个安装就没有什么依赖的头疼的问题,安装ROS很方便,可以去清华的网站下载:https://mirrors.tuna.tsinghua.edu.cn/ubuntu-releases/)
命令1:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu trusty main" > /etc/apt/sources.list.d/ros-latest.list'
命令2(设置密钥):
wget http://packages.ros
命令3(更新软件源):
sudo apt-get update
命令4(安装indigo):
sudo apt-get install ros-indigo-desktop-full
//--------如果网快的话,下载很快的
完成安装后,使用下面的命令来查看已经安装过的可以使用的包
命令5(find avaiable part):
apt-cache search ros-indigo
然后需要对新安装的ROS进行初始化:
命令6:
sudo rosdep init
待上面的这条命令执行完成以后,可以看到有提示需要执行rosdep update命令,那么继续输入:
命令7:
rosdep update
然后需要进行环境变量的设置:
命令8:
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
命令9:
source ~/.bashrc
接下来需要安装一个工具rosinstall,以后会非常有用
命令10:
sudo apt-get install python-rosinstall
这条命令执行完成以后,安装就算基本是完成了。
测试:
Ctrl+Alt+t 打开第一个命令行,输入命令:roscore
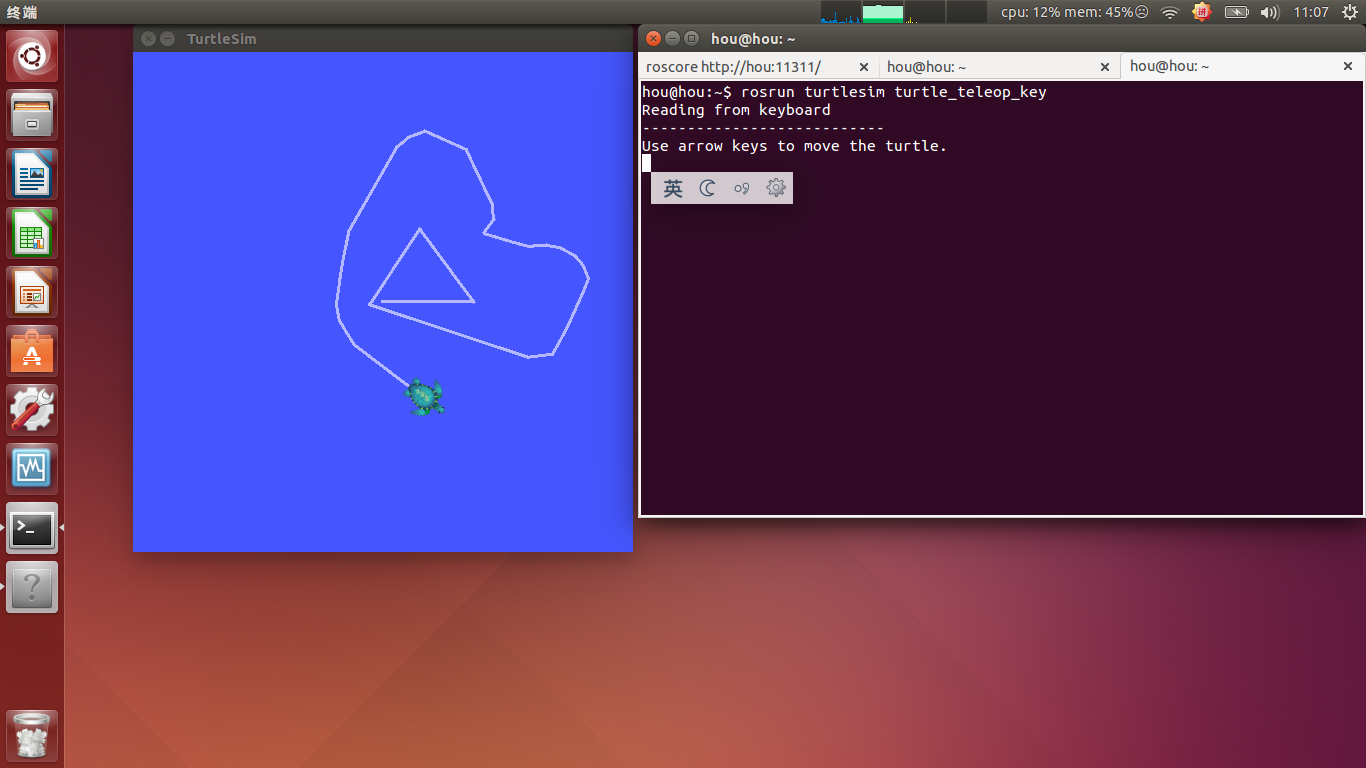
Ctrl+Shift+t 打开第二个命令行,输入命令(注意按 tab提示输入):rosrun turtlesim turtlesim_node
Ctrl+Shift+t 打开第三个命令行,输入命令(注意按 tab提示输入):rosrun turtlesim turtle_teleop_key
光标定位到第三个命令行,按键盘的方向键你会看见有一个小乌龟的动。