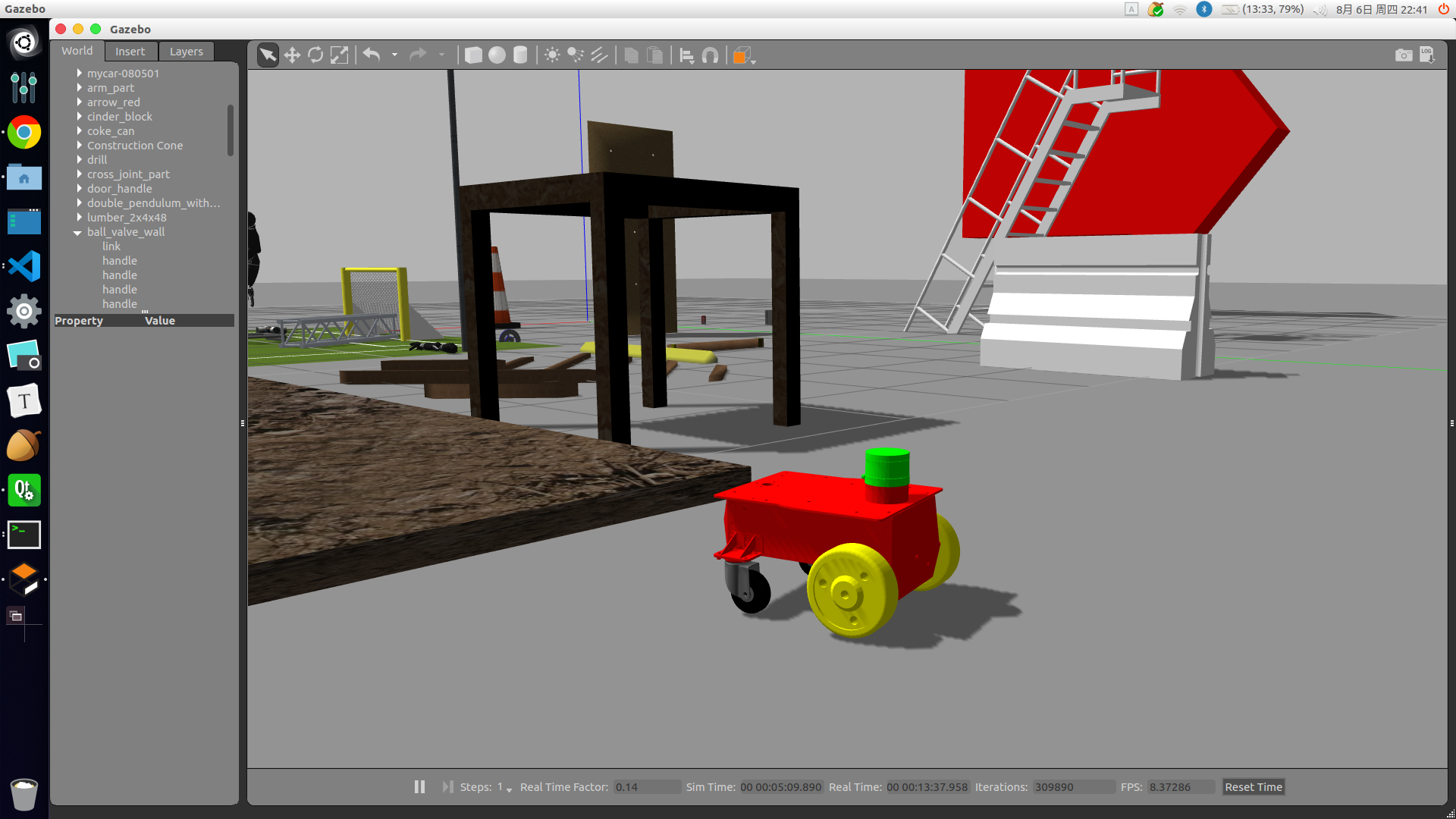
用solidworks到处urdf还是比较方便的,xacro好,但是对我好像并没有什么用?
<?xml version="1.0" encoding="utf-8"?>
<robot
name="mycar-080501">
<gazebo reference="base_link">
<material>Gazebo/Red </material>
</gazebo>
<gazebo reference="leftwheel_link">
<material>Gazebo/Yellow </material>
</gazebo>
<gazebo reference="rightwheel_link">
<material>Gazebo/Yellow </material>
</gazebo>
<gazebo reference="leftcastorwheel_link">
<material>Gazebo/Black </material>
</gazebo>
<gazebo reference="rightcastorwheel_link">
<material>Gazebo/Black </material>
</gazebo>
<gazebo reference="rightcastor_link">
<material>Gazebo/Grey </material>
</gazebo>
<gazebo reference="leftcastor_link">
<material>Gazebo/Grey </material>
</gazebo>
<gazebo reference="vlp_link">
<material>Gazebo/Green </material>
</gazebo>
<link name="base_footprint">
<visual>
<origin xyz="0.041793 -0.00060626 0.19988" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0.041793 -0.00060626 0.19988" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<link
name="base_link">
<inertial>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<mass
value="7.7302" />
<inertia
ixx="0.11154"
ixy="-0.00075198"
ixz="0.010376"
iyy="0.21008"
iyz="-0.00013307"
izz="0.24146" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/base_link.STL" />
</geometry>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/base_link.STL" />
</geometry>
</collision>
<gazebo reference="base_link">
<material name="Black">
<color rgba="0 0 0 1"/>
</material>
</gazebo>
</link>
<link
name="leftwheel_link">
<inertial>
<origin
xyz="1.1102E-16 -2.7756E-17 4.4409E-16"
rpy="0 0 0" />
<mass
value="1.6659" />
<inertia
ixx="0.0046446"
ixy="8.5867E-18"
ixz="2.1412E-18"
iyy="0.0084051"
iyz="1.7579E-19"
izz="0.0046446" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/leftwheel_link.STL" />
</geometry>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/leftwheel_link.STL" />
</geometry>
</collision>
<gazebo reference="leftwheel_link">
<material name="Blue">
<color rgba="0 0 1 1"/>
</material>
</gazebo>
</link>
<joint
name="leftwheel_joint"
type="continuous">
<origin
xyz="0.15638 0.185 0.1"
rpy="0 0 0" />
<parent
link="base_link" />
<child
link="leftwheel_link" />
<axis
xyz="0 1 0" />
</joint>
<link
name="rightwheel_link">
<inertial>
<origin
xyz="-4.7184E-16 2.7756E-17 -2.7756E-17"
rpy="0 0 0" />
<mass
value="1.6659" />
<inertia
ixx="0.0046446"
ixy="-7.0223E-19"
ixz="1.1792E-17"
iyy="0.0084051"
iyz="3.1071E-17"
izz="0.0046446" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/rightwheel_link.STL" />
</geometry>
<material
name="">
<color
rgba="0.33333 0.33333 0.33333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/rightwheel_link.STL" />
</geometry>
</collision>
</link>
<joint
name="rightwheel_joint"
type="continuous">
<origin
xyz="0.156380588704616 -0.184999999999995 0.0999999999999956"
rpy="0 0 0" />
<parent
link="base_link" />
<child
link="rightwheel_link" />
<axis
xyz="0 1 0" />
</joint>
<link
name="leftcastor_link">
<inertial>
<origin
xyz="-0.014919 2.0333E-08 -0.034431"
rpy="0 0 0" />
<mass
value="0.066308" />
<inertia
ixx="6.7914E-05"
ixy="1.0208E-11"
ixz="-9.9589E-06"
iyy="6.8636E-05"
iyz="-2.9374E-11"
izz="6.2053E-05" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/leftcastor_link.STL" />
</geometry>
<material
name="">
<color
rgba="0.37255 0.37255 0.37255 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/leftcastor_link.STL" />
</geometry>
</collision>
</link>
<joint
name="leftcastor_joint"
type="continuous">
<origin
xyz="-0.15612 0.1585 0.115"
rpy="0 0 0" />
<parent
link="base_link" />
<child
link="leftcastor_link" />
<axis
xyz="0 0 -1" />
</joint>
<link
name="leftcastorwheel_link">
<inertial>
<origin
xyz="2.498E-16 0 2.7756E-17"
rpy="0 0 0" />
<mass
value="0.22508" />
<inertia
ixx="0.00015664"
ixy="1.0696E-18"
ixz="1.6255E-19"
iyy="0.00027762"
iyz="1.998E-19"
izz="0.00015664" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/leftcastorwheel_link.STL" />
</geometry>
<material
name="">
<color
rgba="0.50196 0.50196 0.50196 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/leftcastorwheel_link.STL" />
</geometry>
</collision>
</link>
<joint
name="leftcastorwheel_joint"
type="continuous">
<origin
xyz="-0.03725 0 -0.069"
rpy="0 0 0" />
<parent
link="leftcastor_link" />
<child
link="leftcastorwheel_link" />
<axis
xyz="0 -1 0" />
</joint>
<link
name="rightcastor_link">
<inertial>
<origin
xyz="-0.014919 2.0333E-08 -0.034431"
rpy="0 0 0" />
<mass
value="0.066308" />
<inertia
ixx="6.7914E-05"
ixy="1.0208E-11"
ixz="-9.9589E-06"
iyy="6.8636E-05"
iyz="-2.9374E-11"
izz="6.2053E-05" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/rightcastor_link.STL" />
</geometry>
<material
name="gray">
<color
rgba="0.37255 0.37255 0.37255 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/rightcastor_link.STL" />
</geometry>
</collision>
</link>
<joint
name="rightcastor_joint"
type="continuous">
<origin
xyz="-0.15612 -0.1585 0.115"
rpy="0 0 0" />
<parent
link="base_link" />
<child
link="rightcastor_link" />
<axis
xyz="0 0 -1" />
</joint>
<link
name="rightcastorwheel_link">
<inertial>
<origin
xyz="6.7168E-15 -2.0539E-15 4.7184E-16"
rpy="0 0 0" />
<mass
value="0.22508" />
<inertia
ixx="0.00015664"
ixy="1.8282E-21"
ixz="-5.501E-19"
iyy="0.00027762"
iyz="-6.8108E-21"
izz="0.00015664" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/rightcastorwheel_link.STL" />
</geometry>
<material
name="green">
<color
rgba="0.50196 0.50196 0.50196 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/rightcastorwheel_link.STL" />
</geometry>
</collision>
</link>
<joint
name="rightcastorwheel_joint"
type="continuous">
<origin
xyz="-0.03725 0 -0.069"
rpy="0 0 0" />
<parent
link="rightcastor_link" />
<child
link="rightcastorwheel_link" />
<axis
xyz="0 -1 0" />
</joint>
<link
name="vlp_link">
<inertial>
<origin
xyz="-7.5151E-05 -2.5877E-06 0.035859"
rpy="0 0 0" />
<mass
value="0.45" />
<inertia
ixx="0.0049102"
ixy="1.8101E-09"
ixz="-9.8635E-06"
iyy="0.0049341"
iyz="-3.8995E-07"
izz="0.005856" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/VLP_link.STL" />
</geometry>
<material
name="balck">
<color
rgba="0 0.75294 0 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mycar-080501/meshes/VLP_link.STL" />
</geometry>
</collision>
</link>
<joint
name="vlp_Joint"
type="fixed">
<origin
xyz="0.15 0 0.304"
rpy="0 0 0" />
<parent
link="base_link" />
<child
link="vlp_link" />
<axis
xyz="0 0 0" />
</joint>
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>rightwheel_joint</leftJoint>
<rightJoint>leftwheel_joint</rightJoint>
<wheelSeparation>0.4</wheelSeparation>
<wheelDiameter>0.2</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<!-- odometrySource>world </odometrySource><publishOdomTF> False</publishOdomTF> -->
<robotBaseFrame>base_footprint</robotBaseFrame>
</plugin>
</gazebo>
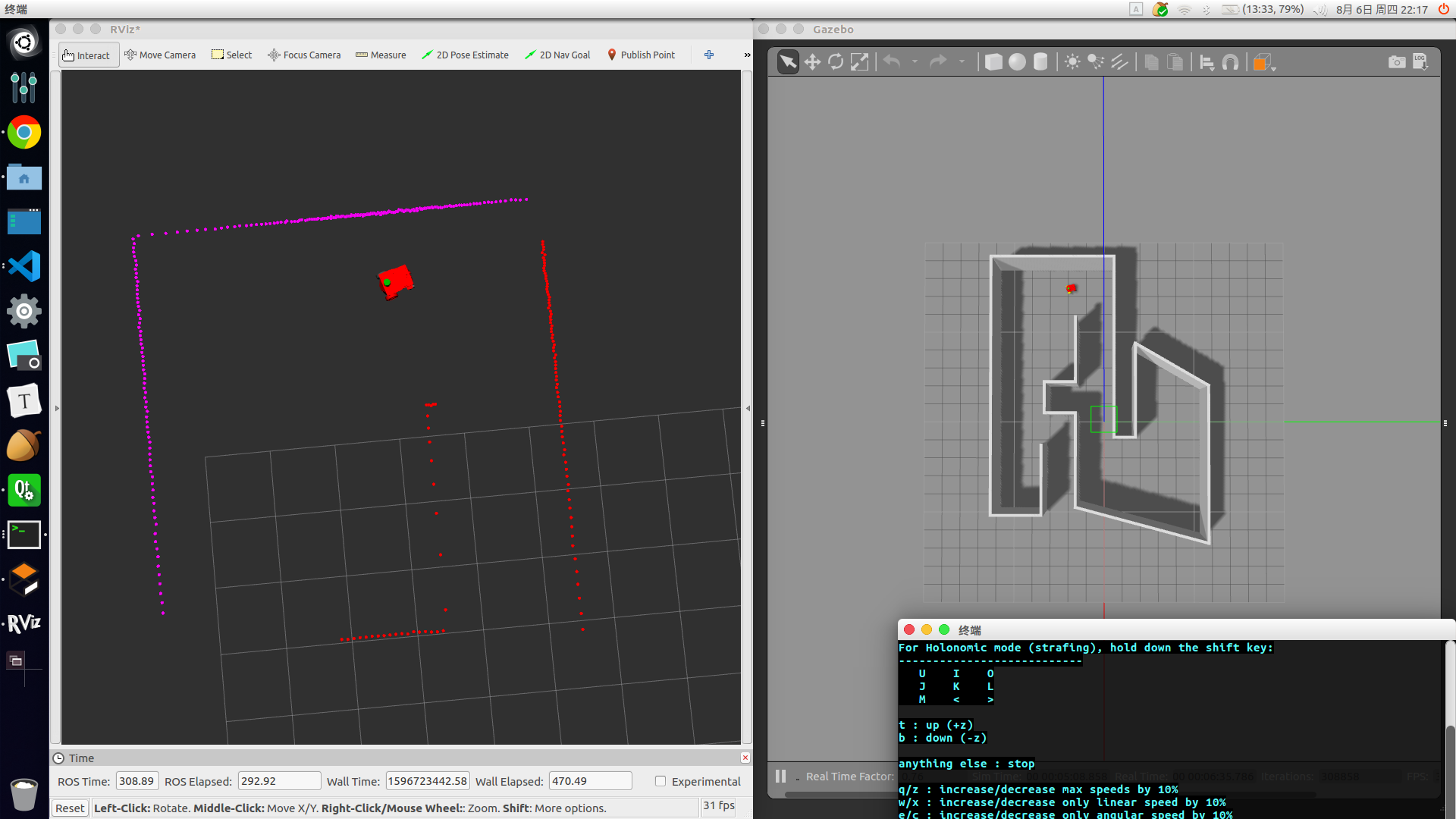
<gazebo reference="vlp_link">
<sensor type="ray" name="rplidar">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3</min_angle>
<max_angle>3</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>vlp_link</frameName>
</plugin>
</sensor>
</gazebo>
</robot>
有时间我一定要研究下博客园里面的markdown缩进,代码太长了,真的难受看着。
launch 文件内容为
<launch>
<arg name="world_name" value="$(find ros_robotic)/worlds/playground.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<arg name="model" default="$(find mycar-080501)/urdf/mycar-080501.urdf"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<param name="robot_description" command="$(find xacro)/xacro --inorder $(arg model)" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" args=" -urdf -model mycar-080501 -param robot_description" respawn="false" output="screen" />
</launch>