solidworks有一个插件http://wiki.ros.org/sw_urdf_exporter,下载后安装。
我这里使用的是solidworks2016,中文版的安装之后在顶部的设置的插件里选择sw2urdf,然后,如果发现文件下没有Export as URDF,那么就需要将软件改为英文版本,在设置里面就可以改。就OK了,这个东西一般是在你的装配体已经装配好了之后使用,在file下有一个Export as URDF,选中之后按照设置选择相应的坐标系和旋转轴,确定好相应的link和joint,就可以了,导出之后,在文件夹下面有一个launch文件夹,使用命令roslaunch xxx xxx.launch model:=xxx.urdf,因为参数model是launch里面定好的,所以要加上。solidworks可以说实我最擅长的软件之一,我这里就不再详细的上图说明过程了。有几点需要注意的是:
- 设置base_link的时候,可以直接在装配体里面的画一个3D sketch,然后在reference coordinate System里面选择草图的直线和原点,这样的好处是,最后你的底盘在rviz里面就是在地面上的;
- 给每个link和joint增加coordinate System和Axis的时候,注意一下xyz的方向,要一致了,而且,x轴要朝前,一般的轮子的轴都是选择y轴,这和rviz里面的规定有关系。
- 机体上一些无关的零件都可以将其定义为base_link一部分,在左边文件树下面可以将这些零件或者装配体选中,然后按住ctrl右键,将这些放到一个新建的文件夹中。这样有利于后面的选择。
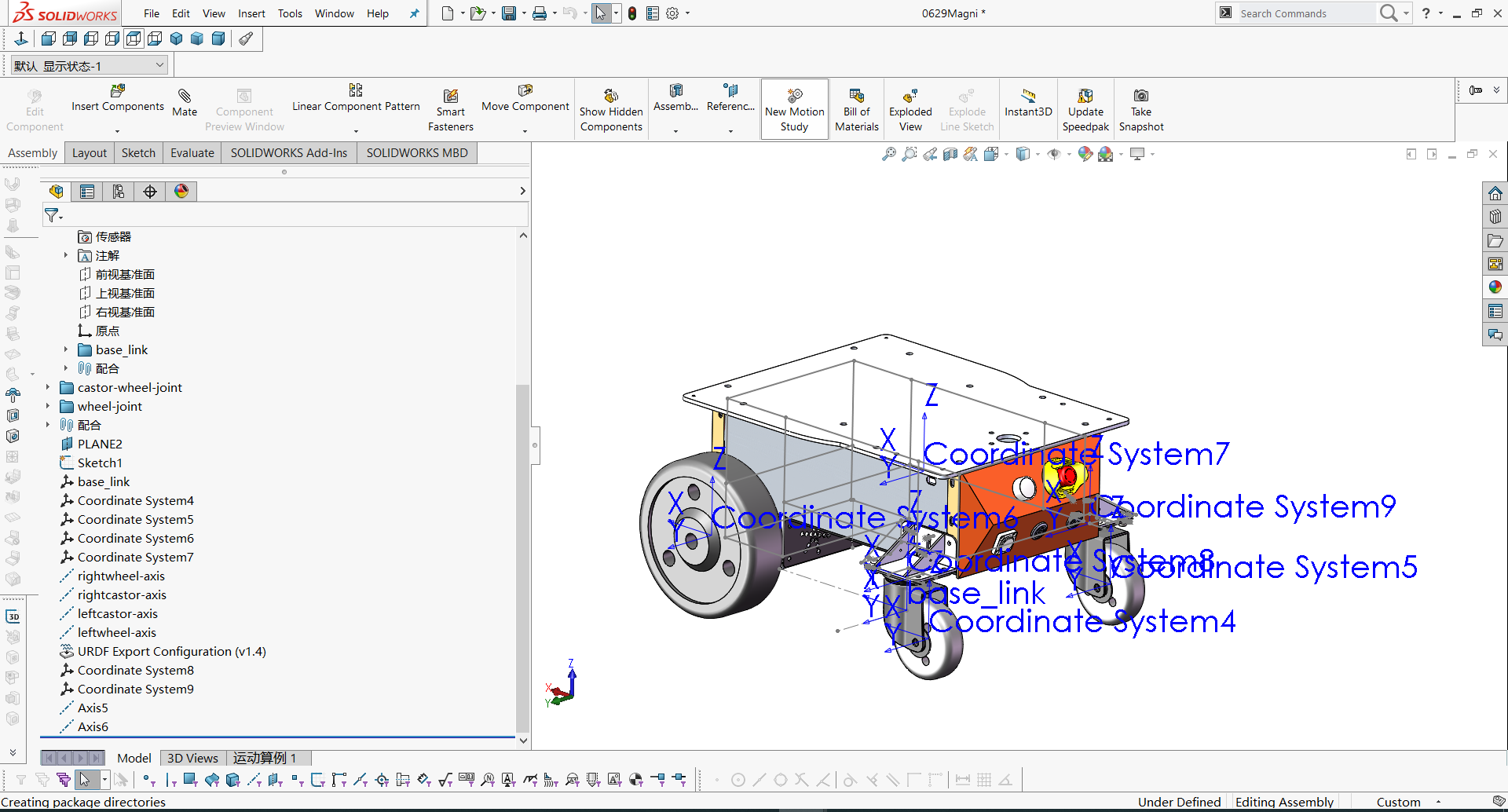
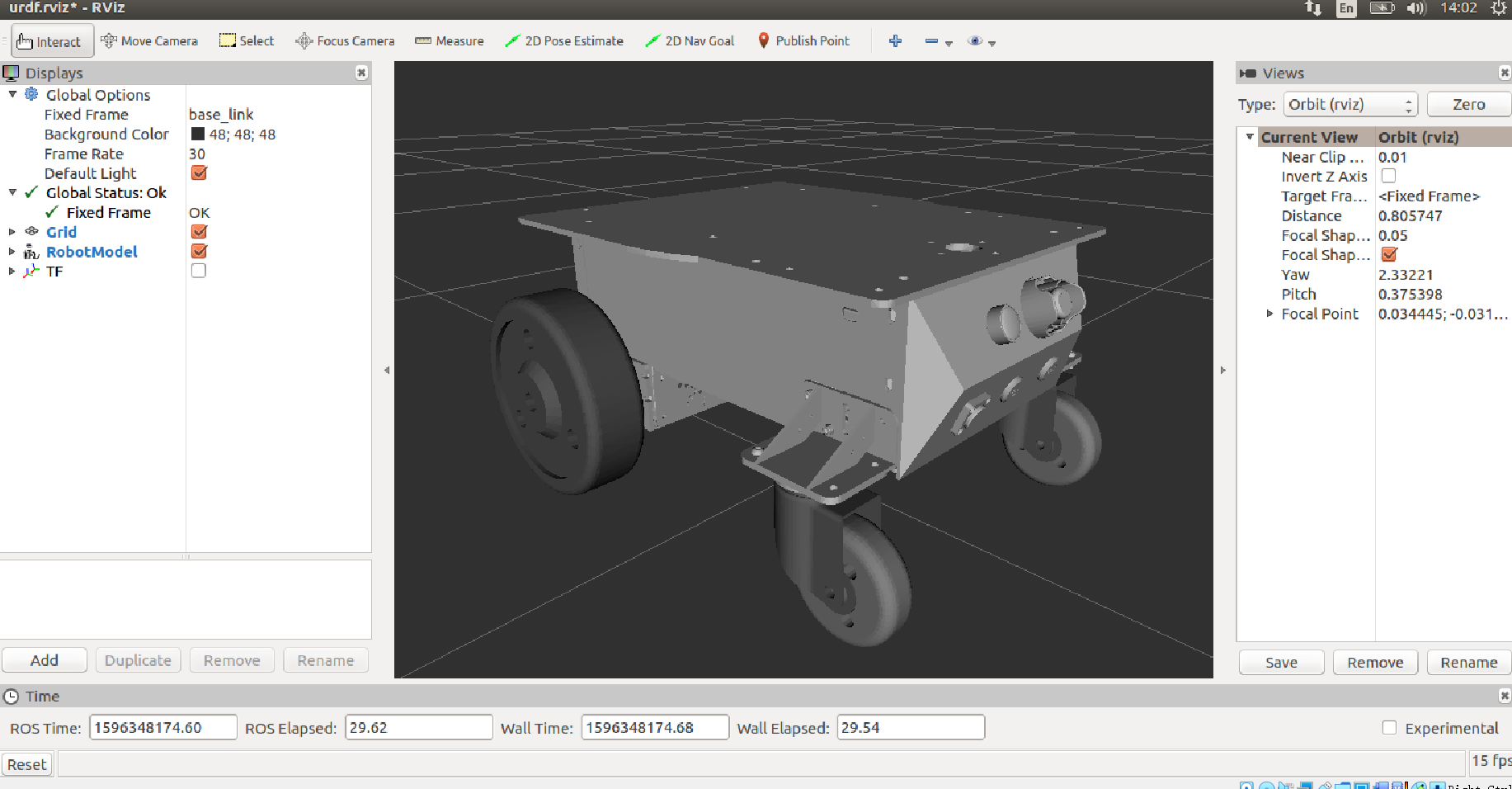
下面是我根据https://robots.ros.org 上一款名为Magni的底盘做的一个图,前轮差速,后轮两个随动轮,我这里每个随动轮都提供了2个转动joint,让它看起来更逼真。下面是在rviz里面的效果。
下面是solidworks里面的设置