图像测量和机器视觉作业:
提取图像中的直线和点的位置坐标,将其按一定顺序编码存入一文本文件,并在原图像上叠加显示出来。

下午实验了一下:
程序环境:vs2013(活动平台为x64)+opencv3.1 (活动平台也要改)
程序运行时会在程序源文件目录下生成:
1)textRecord.txt文件,记录检测到的直线和圆的信息;
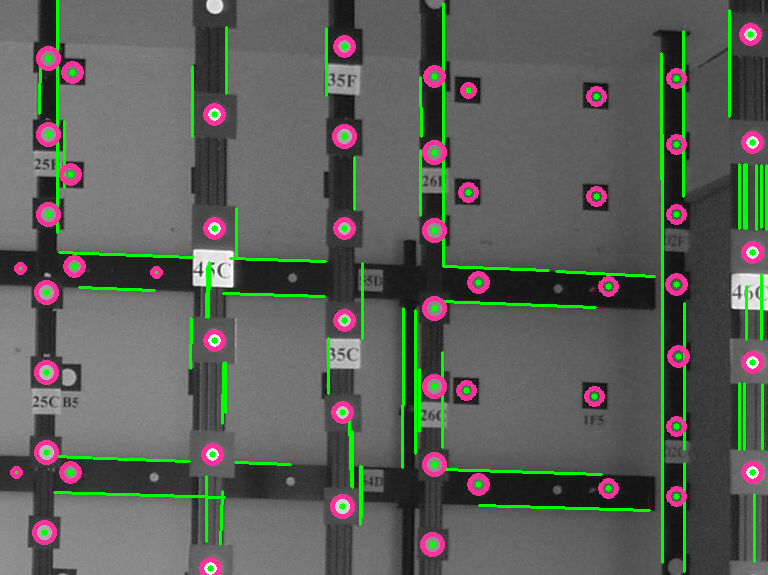
2)hough_trans.bmp文件,为在原图上标记有检测到直线和圆的图像;
3)canny_result.bmp文件,为在边沿提取的图上标记提取的直线,还可以调节阈值,观察效果;
4)HoughTranslation文件夹为程序工程;houghTranslation.cpp文件为源代码文件。
分析:从检测结果可以看出:
1)对直线的检测不是特比理想,在程序中只用到了HoughLinesP函数简单处理;可能以后需要更好的处理方法。
2)对圆的检测还比较理想,程序中运用了HoughCircles函数处理,但是需要精细的调整参数,达到理想的效果。
/*! * file houghTranslation.cpp * * author ranjiewen * date 2016/12/25 16:31 * * */ #include <opencv2/opencv.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/imgproc/imgproc.hpp> #include <iostream> #include <fstream> using namespace std; using namespace cv; //全局变量申明 Mat g_srcImage, g_dstImage, g_midImage, circleImage;//原始图、中间图和效果图 vector<Vec4i> g_lines;//定义一个矢量结构g_lines用于存放得到的线段矢量集合 vector<Vec3f> circles; //变量接收的TrackBar位置参数 int g_nthreshold=100; ofstream text; //输出流写文件 //函数申明 static void on_HoughLines(int, void*);//回调函数 static void ShowHelpText(); void drawDetectLines(Mat& image, const vector<Vec4i>& lines, Scalar & color); void drawDetectCircles(Mat& image, const vector<Vec3f> &circles, Scalar & color); int main(int agrc,char** argv[]) { //改变console字体颜色 system("color 4F"); ShowHelpText(); //载入原始图和Mat变量定义 Mat g_srcImage = imread("CAL_GRAY768_Pro.bmp"); //工程目录下应该有一张名为1.jpg的素材图 //显示原始图 //imshow("【原始图】", g_srcImage); //创建滚动条 namedWindow("【效果图】",1); createTrackbar("值", "【效果图】",&g_nthreshold,200,on_HoughLines); //createTrackbar("值", "【效果图】", &g_nthreshold, 200, on_HoughCircle); //进行边缘检测和转化为灰度图 Canny(g_srcImage, g_midImage, 50, 150, 3);//进行一次canny边缘检测 //imshow("边缘图",g_midImage); cvtColor(g_midImage,g_dstImage, COLOR_GRAY2BGR);//转化边缘检测后的图为灰度图 //调用一次回调函数,调用一次HoughLinesP函数 on_HoughLines(g_nthreshold,0); HoughLinesP(g_midImage, g_lines, 1, CV_PI/180, 80, 50, 10 ); cvtColor(g_srcImage, circleImage, COLOR_BGR2GRAY); GaussianBlur(circleImage, circleImage, Size(9, 9), 2, 2); //数的调整是关键,一定要知道各参数的调整才能调出合适的参数,感觉最小投票数对结果影响较大 HoughCircles(circleImage, circles, HOUGH_GRADIENT, 1, 5, 100, 25, 0, 50); text.open("textRecord.txt",ios::out); drawDetectLines(g_srcImage, g_lines, Scalar(0, 255, 0)); drawDetectCircles(g_srcImage, circles, Scalar(0, 255, 0)); text.close(); //显示效果图 imshow("【效果图】", g_dstImage); imshow("效果图", g_srcImage); imwrite("canny_result.bmp", g_dstImage); //保存图 imwrite("hough_trans.bmp", g_srcImage); //保存图 waitKey(0); return 0; } void drawDetectLines(Mat& image, const vector<Vec4i>& lines, Scalar & color) { text << "检测到的直线总数:" << lines.size() <<"两个坐标为一组。"<< endl; // 将检测到的直线在图上画出来 vector<Vec4i>::const_iterator it = lines.begin(); while (it != lines.end()) { Point pt1((*it)[0], (*it)[1]); Point pt2((*it)[2], (*it)[3]); line(image, pt1, pt2, color, 2); // 线条宽度设置为2 ++it; } for (int i = 0; i < lines.size(); i++) { char str[_MAX_PATH]; sprintf_s(str, _MAX_PATH, "第%d条直线两个端点坐标:", i + 1); text << str << " (" << (lines.at(i)) << ")" << endl; } text << endl; } void drawDetectCircles(Mat& image, const vector<Vec3f> &circles, Scalar & color) { text << "检测到的圆的总数:" << circles.size() << endl; for (size_t i = 0; i < circles.size(); i++) { //参数定义 Point center(cvRound(circles[i][0]), cvRound(circles[i][1])); int radius = cvRound(circles[i][2]); char str[_MAX_PATH]; sprintf_s(str, _MAX_PATH, "第%d个圆心坐标: ", i + 1); text << str << " (" << circles[i][0] << "," << circles[i][1] << ") " << "圆的半径:" << radius << endl; //绘制圆心 circle(image, center, 3, Scalar(0, 255, 0), -1, 8, 0); //绘制圆轮廓 circle(image, center, radius, Scalar(155, 50, 255), 3, 8, 0); } } static void on_HoughCircle(int ,void*) { GaussianBlur(g_midImage, g_midImage, Size(9, 9), 2, 2); //【4】进行霍夫圆变换 vector<Vec3f> circles; HoughCircles(g_midImage, circles, HOUGH_GRADIENT, 1.5, 10, 200, 100, 0, 0); //【5】依次在图中绘制出圆 for (size_t i = 0; i < circles.size(); i++) { //参数定义 Point center(cvRound(circles[i][0]), cvRound(circles[i][1])); int radius = cvRound(circles[i][2]); //绘制圆心 circle(g_srcImage, center, 3, Scalar(0, 255, 0), -1, 8, 0); //绘制圆轮廓 circle(g_srcImage, center, radius, Scalar(155, 50, 255), 3, 8, 0); } } //---【on_HoughLines( )函数】------------------- // 描述:【顶帽运算/黑帽运算】窗口的回调函数 //---------------------------------------------- static void on_HoughLines(int, void*) { //定义局部变量储存全局变量 Mat dstImage=g_dstImage.clone(); Mat midImage=g_midImage.clone(); //调用HoughLinesP函数 vector<Vec4i> mylines; HoughLinesP(midImage, mylines, 1, CV_PI/180, g_nthreshold+1, 50, 10 ); //循环遍历绘制每一条线段 for( size_t i = 0; i < mylines.size(); i++ ) { Vec4i l = mylines[i]; line( dstImage, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(23,180,55), 1, LINE_AA); } //显示图像 imshow("【效果图】",dstImage); } static void ShowHelpText() { //输出欢迎信息和OpenCV版本 printf(" 当前使用的OpenCV版本为:" CV_VERSION ); printf(" ---------------------------------------------------------------------------- "); //输出一些帮助信息 printf(" 请调整滚动条观察图像效果~ "); }
实验结果: