其实之前就用stm32获取过6050的原始数据,但是当时只是为了用而用,对他的理解并不深入,也不明白到底是怎么获得这些数据的。
这几天回归原始,通过STC89C52RC,再一次对6050进行驱动,并获取原始数据。经过几天的努力,现在其实感觉6050没有想象中的那么复杂,复杂的是后面对他的数据进行的滤波和姿态解算。获取数据其实就是对里面的一些寄存器进行配置。但是要求熟练掌握单片机的 IIC 通信协议。通信协议这东西其实看着很简单,但是实际用起来有很多细节方面的东旭需要注意。关于具体 IIC 的通信协议发内容,可以看这里。但是最重要的还是通过自己真正的把 IIC 的协议给写出来,在遇到问题的过程中靠自己慢慢的去查找错误,其实这个过程最能锻炼人。在这个过程中,能收货很多东西。好了,貌似扯远了。
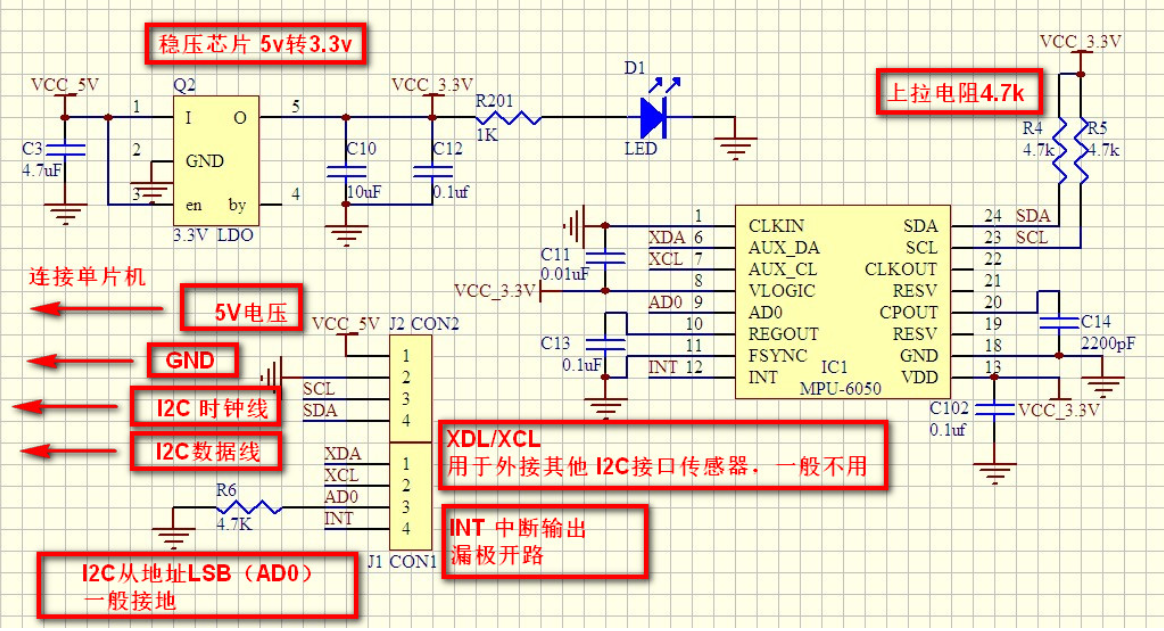
这是GY-521模块:

鉴于大部分同学使用的可能都是这个模块,就在说明一下 这个模块的内部电路图把。
这是进一步的封装的姿态解算模块:

这才是真正的MPU6050:
下面开始介绍重点,关于MPU6050的我的一些理解:
首先要知道6050的内置模块。包括一个三轴MEMS(微机电系统(MEMS, Micro-Electro-Mechanical System))陀螺仪、三轴MEMS加速度计,一个数字运动处理引擎(DMP)、还有用于第三方数字传感器接口的辅助IIC端口,(GY-521上面的xda,xcl),常用于扩展磁力计,当辅助IIC接口连接到一个三轴磁力计上面时,6050能提供一个完整的九轴融合输出到其主IIC接口上。同时,6050内部还内置了一个可编程的低通滤波器,可用于传感器数据的滤波。
要玩转6050,首先要明白 驱动IIC总线,然后初始化6050,最后从6050读取原始数据。其实就是读取几个寄存器。
其实之前就用过IIC,但是当时只是随用随学,导致现在也找不到当时的程序了,虽然这种程序网上一找一大堆,但是不是自己写的,心里难免有点难受。所以以后在平时学习的基础上一定要注重积累,积累自己常用的代码库,方便以后开发。
其次,我们手上的芯片可能不是单纯的MPU6050芯片,可能是别人包装好的GY-521模块,这个模块是对原始MPU6050进行了外围电路的设计,使之成为一个可以拿来就用的模块。在某宝上面售价基本在10RMB左右。当然,还有更厉害的,网上卖的直接 一个成品,模块上面集成了32位高速处理器,直接输出的就是经过滤波和姿态融合之后的数据。价格也基本在100RMB左右。更加方便。但是相应的可扩展性也就更差。
我们要做的就是在GY-521的基础上,自己通过单片机编程,来输出自己获取的姿态数据。进而可以用在自己的小制作上面。
1、关于DMP,知乎上有个网友的回答感觉很好:
【DMP就是指 MPU6050内部集成的处理单元,可以直接运算出四元数和姿态,而不再需要另外进行数学运算。DMP的使用大大简化了代码设计。DMP是数字运动处理器的缩写,顾名思义mpu9150(mpu6050)并不单单是一款传感器,其内部还包含了可以独立完成姿态解算算法的处理单元。如在设计中使用DMP来实现传感器融合算法优势很明显。首先,invensense官方提供的姿态解算算法应该比一般的小白要可靠的多。其次,由DMP实现姿态解算算法将单片机从算法处理的压力中解放出来,单片机所要做的是等待DMP解算完成后产生的外部中断,在外部中断里去读取姿态解算的结果。这样单片机有大量的时间来处理其他任务,提高了系统的实时性。经过 DMP你就可以得到四元数,四元数就是4个数,可以表征姿态,经过几个数学公式之后就可以的出姿态,姿态包括pitch,roll,yaw。综上,dmp之后直接出结果,可以直接用,当然你如果有特殊需要自己还要加滤波也没有问题。】
使用DMP虽然能减轻很多单片机的负载和压力,但是听说DMP的参考平面有点蛋疼。他解算出来的姿态角是以上电时的平面为基准平面的。也就是说每次上电都要把装置摆到绝对水平。但这有点困难。
2、加速度传感器是干嘛用的?
总而言这,加速度传感器,其实是力传感器。用来检查上下左右前后哪几个面都受了多少力(包括重力),然后计算角度。
3、陀螺仪是干嘛用的?
简而言之,陀螺仪就是角速度检测仪。比如,一块板,以X轴为轴心,在一秒钟的时间转到了90度,那么它在X轴上的角速度就是 90度/秒 (DPS, 角速度单位,Degree Per Second的缩写°/S ,体现了转动的快慢)
4、MPU6050分辨率是多少?
3轴加速度 和3轴陀螺仪分别用了3个16位的ADC,加速度有3个16位ADC,其中每个轴使用了一个。也是说,每个轴输出的数据,是2^16 也就是 -32768 —- +32768。陀螺仪也是一样。
单位换算 :
上面说的-32768 — +32768 ,那么这个数字到底代表了什么呢?比如陀螺仪 32768 到底是指角速度达到多少度/秒 ?
这个其实是根据MPU6050设置的量程来决定的,量程不一样,32768代表的值就不一样。
分别设置为,250度/秒 , 2g
按陀螺仪来说,MPU6050 有四个量程可选:
±250,±500,±1000,±2000 度/s
比方说,设置了是 ±250 , 那么-32768 —- +32768 就代表了 -250 —- +250 。此时它的LSB(拉傻B,最低有效位) 是 32768 / 250 = 131 LSB/(度/s)。如果你一秒内旋转的角度超过了250度,那么检测出来的值仍然是250BPS,此时对于你的要求来说这个值是不准确的。
-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
下面是程序的讲解了:
//------------初始化--------------- unsigned char mpu6050_init(void) { if(iic_read_addr_byte(WHO_AM_I) != 0X68) //检查6050是否正常 { return 0; } iic_write_addr_byte(PWR_MGMT_1, 0x00); //电源管理,解除休眠状态 delay_1ms(1); iic_write_addr_byte(SMPLRT_DIV, 0x00); //陀螺仪采样率,典型值0x00,陀螺仪输出频率为8KHZ, delay_1ms(1); iic_write_addr_byte(CONFIG, 0x00); //配置加速度计和陀螺仪的滤波器,加速度计始终1KHZ输出率,滤波的话。陀螺仪1KHZ输出,通过datasheet可以看到,滤波就是滤掉了250hz的频率分量 delay_1ms(1); iic_write_addr_byte(GYRO_CONFIG, 0x18); //陀螺仪自检及测量范围,典型值0x18,不自检,2000dps ,LSB:16.4 delay_1ms(1); iic_write_addr_byte(ACCEL_CONFIG, 0x1F); //加速度计自检、测量范围,典型值0x1f,不自检,16G ,LSB:2048 return 1; } //------读取三轴加速度计的原始值,16位二进制数------ void mpu6050_read_acc(int* acc_data) //16位adc, { unsigned char buff[6]; unsigned char i; for(i = 0;i<6;i++) { buff[i] = iic_read_addr_byte(ACC_ADDR + i); } acc_data[0] = (buff[0] << 8) | buff[1];//x轴高8位左移8位或上低8位 acc_data[1] = (buff[2] << 8) | buff[3]; acc_data[2] = (buff[4] << 8) | buff[5]; } //------读取三轴陀螺仪原始值----- void mpu6050_read_gyro(int* gyro_data) { unsigned char buff[6]; unsigned char i; for(i = 0;i<6;i++) { buff[i] = iic_read_addr_byte(GYRO_ADDR + i); } gyro_data[0] = (buff[0] << 8) | buff[1];//x轴高8位左移8位或上低8位 gyro_data[1] = (buff[2] << 8) | buff[3]; gyro_data[2] = (buff[4] << 8) | buff[5]; }
然后我们可以通过串口助手查看6050输出的数据是否正确(注意这时串口波特率的配置)

----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
当已经能正确输出6050数据的时候,就可以准备使用匿名上位机来显示波形了。因为后面需要进行滤波,单纯的看这些数据的话,估计一天下来,眼都要瞎了吧。所以为了保护好自己的眼睛,我们要 学会使用上位机来帮助我们。注意,这里不是打广告,具体使用什么上位机自己可以自由选择。
首先,我也不知道该怎么用上位机来显示波形,于是我请教了一位大佬,大佬和我说了这句话:
把传感器的数据按照地面站协议打包用串口发给电脑就行了
这句话得增大加粗来显示,因为这是接下来的核心思想。下面就是匿名的通信协议。打包,最后的函数是调用串口的发送函数,进行发送。
/**********为了匿名四轴上位机的协议定义的变量****************************/ //cup为小端模式存储,也就是在存储的时候,低位被存在0字节,高位在1字节 #define BYTE0(dwTemp) (*(char *)(&dwTemp)) //取出int型变量的低字节 #define BYTE1(dwTemp) (*((char *)(&dwTemp) + 1)) // 取存储在此变量下一内存字节的内容,高字节 #define BYTE2(dwTemp) (*((char *)(&dwTemp) + 2)) #define BYTE3(dwTemp) (*((char *)(&dwTemp) + 3)) /* 发送给上位机的数据帧定义 @桢头--功能字--长度--数据(一个或多个,具体看协议说明)-校验 @前2个字节为帧头0xAAAA @第3个字节为帧ID,应设置为0xF1~0xFA中的一个 @第4个字节为报文数据长度(dlc) @第5个字节开始到第5+dlc-1个字节为要传输的数据内容段,每个数据场为高字节在前,地字节在后 @第5+dlc个字节为CheckSum,为第1个字节到第5+dlc-1个字节所有字节的值相加后,保留结果的低八位作为CheckSum */ void data_to_computer(int* acc_data,int* gyro_data) { unsigned char data_to_send[23] = {0}; unsigned char i = 0; unsigned char cnt = 0; unsigned char sum = 0; data_to_send[cnt++]=0xAA; //帧头:AAAA data_to_send[cnt++]=0xAA; data_to_send[cnt++]=0x02; //功能字:OXF2 data_to_send[cnt++]=0; //需要发送数据的字节数,暂时给0,后面在赋值。 data_to_send[cnt++] = BYTE1(acc_data[0]);//取data[0]数据的高字节, data_to_send[cnt++] = BYTE0(acc_data[0]); data_to_send[cnt++] = BYTE1(acc_data[1]); data_to_send[cnt++] = BYTE0(acc_data[1]); data_to_send[cnt++] = BYTE1(acc_data[2]); data_to_send[cnt++] = BYTE0(acc_data[2]); data_to_send[cnt++] = BYTE1(gyro_data[0]);//取data[0]数据的高字节, data_to_send[cnt++] = BYTE0(gyro_data[0]); data_to_send[cnt++] = BYTE1(gyro_data[1]); data_to_send[cnt++] = BYTE0(gyro_data[1]); data_to_send[cnt++] = BYTE1(gyro_data[2]); data_to_send[cnt++] = BYTE0(gyro_data[2]); data_to_send[cnt++]=0; data_to_send[cnt++]=0; data_to_send[cnt++]=0; data_to_send[cnt++]=0; data_to_send[cnt++]=0; data_to_send[cnt++]=0; data_to_send[3] = cnt-4;//计算总数据的字节数。 for(i=0;i<cnt;i++) //对于for语句,当不写大括号的时候,只执行到下面第一个分号结束。 { sum+=data_to_send[i]; } data_to_send[cnt++] = sum; //计算校验位 uart_send_string(data_to_send,cnt); }
但是呢,虽然能出波形,但是慢的像**一样。。当使用11.0592晶振的单片机时,能与匿名上位机上面的波特率匹配的最高只有9600波特率了,虽然单片机还能产生更高的波特率,但是匿名上位机上面没有匹配的。这就很尴尬,使用9600波特率的时候,波形出来的很慢,不容易观察。
查资料才知道,51单片机使用11.0592晶振的时候,最大只能产生28800波特率,离上位机中基本的115200还差了近5倍。
查资料中。。。。。。。。。。。。。。。。。。。。。。。
哦,原来还可以通过定时器2来作为波特率的通信发生器。但是我到现在还从来没用过定时器2呢。
如何使用单片机的定时器2,我参考了这下面三篇文章(都很好):
https://www.cnblogs.com/perfy/p/3782166.html
https://www.cnblogs.com/CodeHXH/archive/2011/05/25/2057242.html
http://blog.csdn.net/lile777/article/details/45719283
看完之后,发现还 方便了很多呢。
//使用定时器2做波特率发生器,@11.0292M SCON = 0X50; TH2 = RCAP2H = 0XFF;//baud : 115200 TL2 = RCAP2L = 0XFD; T2CON = 0X34;//设置定时器 2 工作模式,波特率发生器 IE = 0X90;//IE中断允许寄存器,0x90是开总中断和串口中断。
通过这几行代码,你就可以使用定时器2来产生波特率了。搭配11.0592M 晶振,最大可以产生110592bps的波特率。
啊,自从使用了定时器2,腰不酸,腿不疼了,上楼也有劲儿了..........................
2017.12.4 下午
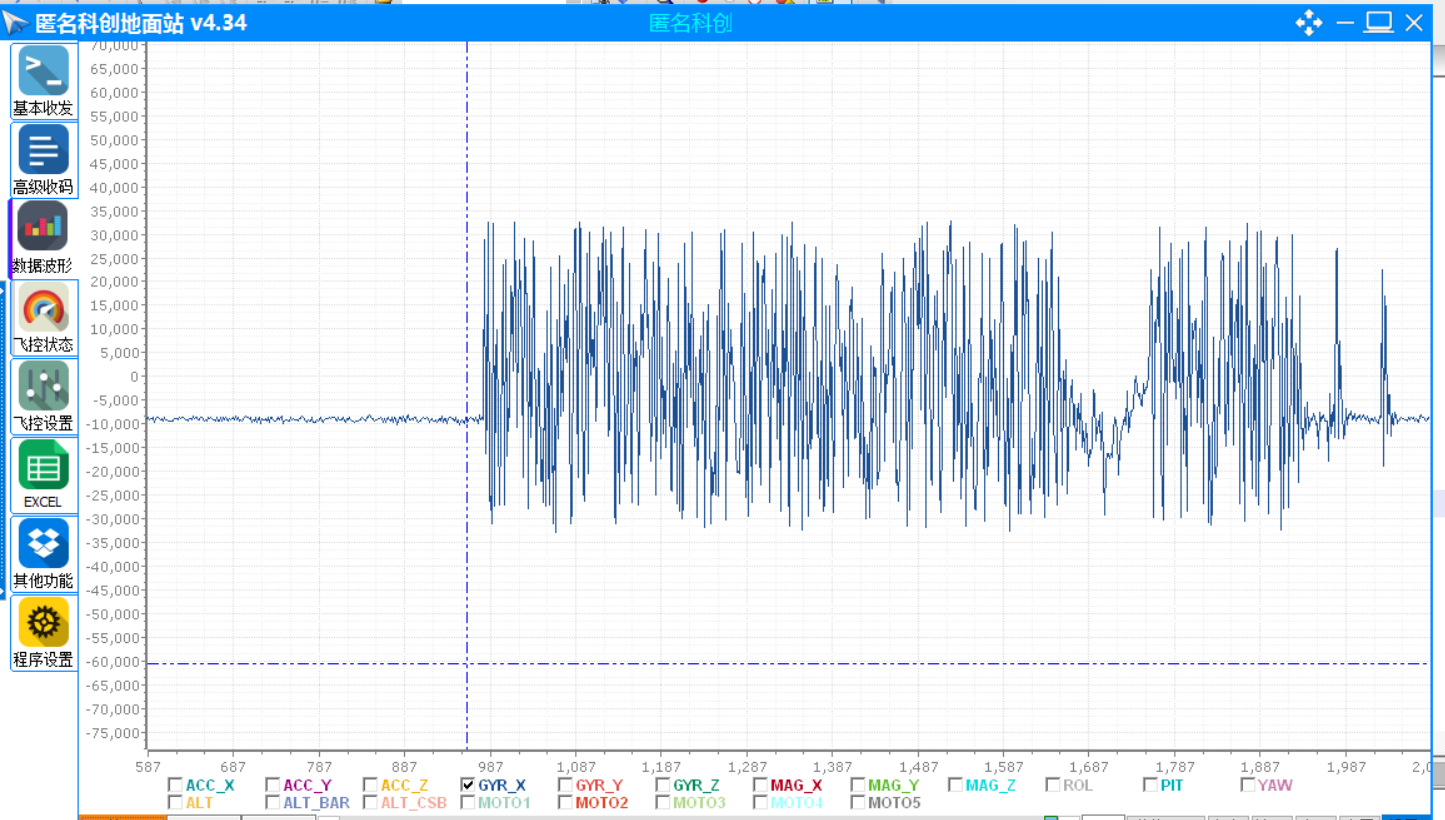
终于在stc89c52rc上面使用定时器2,产生115200波特率的传输速率,将mpu6050获取的原始数据通过匿名上位机折线图显示了出来。
虽然目前还不是很懂定时器2的具体用法和串口怎么和上位机通信的原理。但是目前第一步做到了。后面就是学习一些滤波算法,并初步在51单片机上面实现,对这些嘈杂的原始数据进行滤波,和四元数姿态解算。
一点教训:当单片机电压过高的话,单片机不会工作,但是在8V以内,单片机也没有烧。
同样的程序,同样的操作,一开始早不到合适的电源,只能使用8V电源供电,但是单片机不工作,但是也没有烧掉,这是单片机的自我保护原理吗?还是其他?
这篇博客展示了如何将6050的数据发送给匿名上位机通过波形显示:
http://bbs.elecfans.com/jishu_536667_1_5.html
匿名上位机使用介绍:(但是我还没看。)
http://v.youku.com/v_show/id_XNTkzNDkxNTU2.html