若该文为原创文章,未经允许不得转载
原博主博客地址:https://blog.csdn.net/qq21497936
原博主博客导航:https://blog.csdn.net/qq21497936/article/details/102478062
本文章博客地址:https://blog.csdn.net/qq21497936/article/details/106180872
各位读者,知识无穷而人力有穷,要么改需求,要么找专业人士,要么自己研究
红胖子(红模仿)的博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结合等等)持续更新中…(点击传送门)
上一篇:《OpenCV开发笔记(五十五):红胖子8分钟带你深入了解Haar、LBP特征以及级联分类器识别过程(图文并茂+浅显易懂+程序源码)》
下一篇:《OpenCV开发笔记(五十七):红胖子8分钟带你深入了解直方图反向投影(图文并茂+浅显易懂+程序源码)》
红胖子,来也!
识别目标,可以通过图形拟合,将目标提取出来。

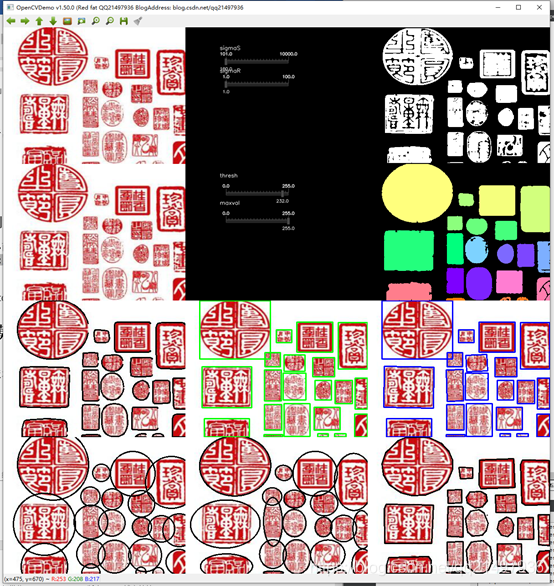
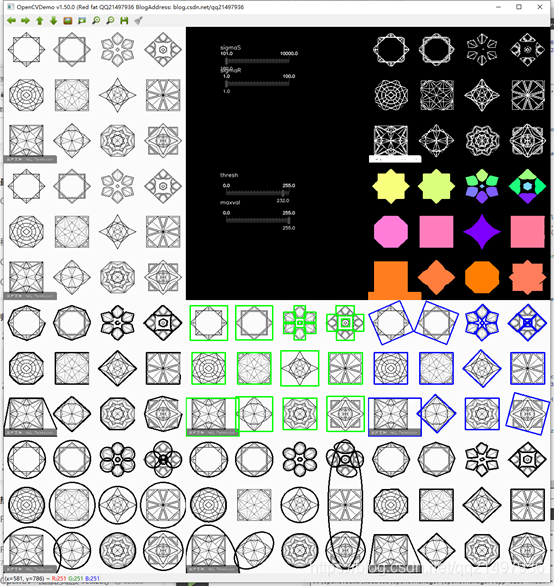
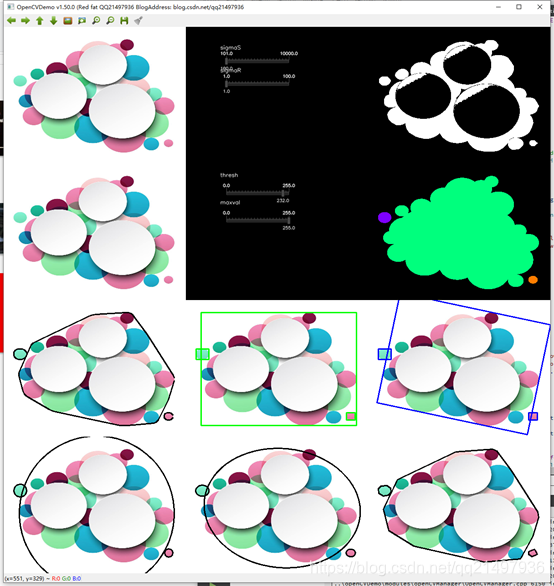
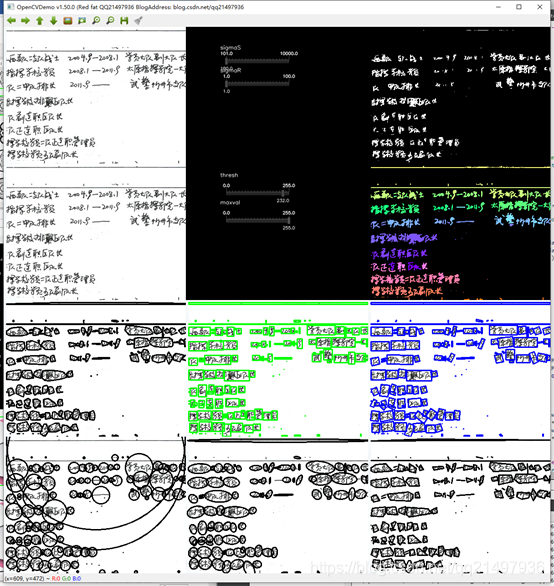
寻找轮廓之后,openCV提供了对输入点集合进行多种图形进行拟合的方法,基本都是输入之前寻找凸包后再进行操作,当然也可以直接对了轮廓进行操作。
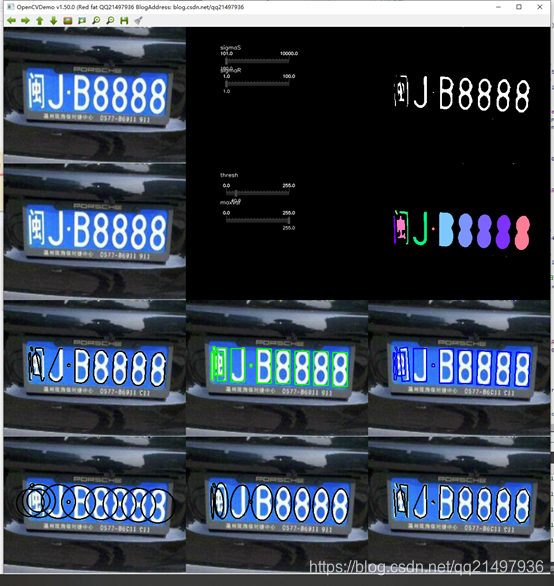
识别不同的目标物体,根据形状可以剔除,还可以做很多其他的操作,比如车牌识别,提取车牌号码,那么直接可以拿到每个车牌字符的矩形,直接对矩形进行roi,然后在进行下一步的识别操作(补充:这部分可以拿到坐标后,自己写算法也是一样,看个人习惯)。
(返回的是水平的矩形)
Rect boundingRect( InputArray points );
- 参数一:InputArray类型的points,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中;
(最小面积则其返回的矩形基本都是旋转的,注意返回的类型)
RotatedRect minAreaRect( InputArray points );
- 参数一:InputArray类型的points,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中;
void minEnclosingCircle( InputArray points,
Point2f& center,
float& radius );
- 参数一:InputArray类型的points,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中;
- 参数二:Point2f类型的center,返回圆形的中心点;
- 参数三:float类型的radius,返回圆形的半径;
(注意:至少需要输入6个点)
RotatedRect fitEllipse( InputArray points );
- 参数一:InputArray类型的points,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中(至少要6个点);
返回提取四个点的代码:
cv::RotatedRect rotateRect = cv::minAreaRect(hullPoints);
cv::Point2f vertex[4];
rotateRect.points(vertex);
void approxPolyDP( InputArray curve,
OutputArray approxCurve,
double epsilon,
bool closed );
- 参数一:InputArray类型的curve,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中;
- 参数二:OutputArray类型的approxCurve;输出多边形结果std::vector<cv::Point2f>;
- 参数三:double类型的epsilon,指定近似精度。这是最大距离;
- 参数四:bool类型的closed,如果为真,则近似曲线是闭合的(其第一个顶点和最后一个顶点是已连接)。否则,它不会关闭。
double minEnclosingTriangle( InputArray points, OutputArray triangle );
- 参数一:InputArray类型的points,二维点(轮廓顶点)的轮廓输入向量,存储在std::vector或Mat中;
- 参数二:OutputArray类型triangle,返回三角形;
void OpenCVManager::testFitting()
{
QString fileName1 =
"E:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/10.jpg";
cv::Mat srcMat = cv::imread(fileName1.toStdString());
cv::Mat dstMat;
int width = 400;
int height = 300;
cv::resize(srcMat, srcMat, cv::Size(width, height));
cv::String windowName = _windowTitle.toStdString();
cvui::init(windowName);
cv::Mat windowMat = cv::Mat(cv::Size(srcMat.cols * 3,
srcMat.rows * 4),
srcMat.type());
int sigmaS = 100;
int sigmaR = 1.0;
int thresh = 232;
int maxval = 255;
while(true)
{
// 刷新全图黑色
windowMat = cv::Scalar(0, 0, 0);
// 原图复制
cv::Mat mat = windowMat(cv::Range(srcMat.rows * 0, srcMat.rows * 1),
cv::Range(srcMat.cols * 0, srcMat.cols * 1));
cv::addWeighted(mat, 0.0f, srcMat, 1.0f, 0.0f, mat);
cv::Mat tempMat;
{
{
cvui::printf(windowMat, 75 + width * 1, 40 + height * 0, "sigmaS");
cvui::trackbar(windowMat, 75 + width * 1, 50 + height * 0, 165, &sigmaS, 101, 10000);
cvui::printf(windowMat, 75 + width * 1, 90 + height * 0, "sigmaR");
cvui::trackbar(windowMat, 75 + width * 1, 100, 165 + height * 0, &sigmaR, 1, 100);
// 使用自适应流形应用高维滤波。
cv::Ptr<cv::ximgproc::AdaptiveManifoldFilter> pAdaptiveManifoldFilter
= cv::ximgproc::createAMFilter(sigmaS/100.0f, sigmaR/100.0f, true);
pAdaptiveManifoldFilter->filter(srcMat, tempMat);
// 效果图copy
mat = windowMat(cv::Range(srcMat.rows * 1, srcMat.rows * 2),
cv::Range(srcMat.cols * 0, srcMat.cols * 1));
cv::addWeighted(mat, 0.0f, tempMat, 1.0f, 0.0f, mat);
}
// 转为灰度图像
cv::cvtColor(tempMat, tempMat, cv::COLOR_BGR2GRAY);
// 车牌时,对灰度图取反操作
// tempMat = ~tempMat;
{
// 调整阈值化的参数thresh
cvui::printf(windowMat, 75 + width * 1, 20 + height * 1, "thresh");
cvui::trackbar(windowMat, 75 + width * 1, 40 + height * 1, 165, &thresh, 0, 255);
// 调整阈值化的参数maxval
cvui::printf(windowMat, 75 + width * 1, 80 + height * 1, "maxval");
cvui::trackbar(windowMat, 75 + width * 1, 100 + height * 1, 165, &maxval, 0, 255);
// 阈值化,注意:此处使用了THRESH_BINARY_INV,白色是255,255,255所以反转阈值化
cv::threshold(tempMat, tempMat, thresh, maxval, cv::THRESH_BINARY_INV);
// 效果图copy
mat = windowMat(cv::Range(srcMat.rows * 0, srcMat.rows * 1),
cv::Range(srcMat.cols * 2, srcMat.cols * 3));
// 转换图像
cv::Mat grayMat;
cv::cvtColor(tempMat, grayMat, cv::COLOR_GRAY2BGR);
cv::addWeighted(mat, 0.0f, grayMat, 1.0f, 0.0f, mat);
}
// 寻找轮廓
{
std::vector<std::vector<cv::Point>> contours;
std::vector<cv::Vec4i> hierarchy;
// 查找轮廓:RETR_EXTERNAL-最外层轮廓
cv::findContours(tempMat, contours, hierarchy, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE);
// 遍历所有顶层轮廓,并绘制出来
dstMat = srcMat.clone();
cv::Mat emptyMat = srcMat.clone();
emptyMat = cv::Scalar(0,0,0);
// 拟合矩形框
cv::Mat fittingRectMat = srcMat.clone();
cv::Mat fittingMinAreaRectMat = srcMat.clone();
cv::Mat fittingMinAreaCircleMat = srcMat.clone();
cv::Mat fittingEllipseMat = srcMat.clone();
cv::Mat fittingPolyMat = srcMat.clone();
// 轮廓contours[i]对应4个hierarchy元素hierarchy[i][0]~ hierarchy[i][3],
// hierarchy[i][0]表示后一个轮廓的索引编号
// hierarchy[i][1]前一个轮廓的索引编号
// hierarchy[i][2]父轮廓的索引编号
// hierarchy[i][3]内嵌轮廓的索引编号
for(int index = 0; index >=0; index = hierarchy[index][0])
{
if(hierarchy.size() <= 0)
{
break;
}
cv::Scalar color;
if(index < hierarchy.size() / 3)
{
color = cv::Scalar(250 / (hierarchy.size() / 3) * index, 125, 255);
}else if(index < hierarchy.size() / 3 * 2)
{
color = cv::Scalar(255, 250 / (hierarchy.size() / 3) * (index - hierarchy.size() / 3), 125);
}else
{
color = cv::Scalar(125, 255, 250 / (hierarchy.size() / 3 == 0 ? 1 :
hierarchy.size() / 3) * (index - hierarchy.size() / 3 * 2));
}
// 绘制轮廓里面的第几个
cv::drawContours(emptyMat, contours, index, color, CV_FILLED, 8, hierarchy);
// 寻找最大凸包
std::vector<cv::Point> hullPoints;
std::vector<int> hullIndex;
cv::convexHull(contours[index], hullPoints, false, true);
cv::convexHull(contours[index], hullIndex, false, false);
// 绘制凸包包围线
for(int index2 = 1; index2 < hullPoints.size(); index2++)
{
cv::line(mat, hullPoints.at(index2 - 1), hullPoints.at(index2), cv::Scalar(0, 0, 0), 2);
cv::line(dstMat, hullPoints.at(index2 - 1), hullPoints.at(index2), cv::Scalar(0, 0, 0), 2);
}
qDebug() << __FILE__ << __LINE__ << "index =" << index << "total =" << hierarchy.size();
// 使用形状拟合
// 使用外部包围矩形
{
cv::Rect rect = cv::boundingRect(hullPoints);
cv::rectangle(fittingRectMat, rect, cv::Scalar(0, 255, 0), 2);
}
// 使用外部最小包围矩形
{
cv::RotatedRect rotateRect = cv::minAreaRect(hullPoints);
cv::Point2f vertex[4];
rotateRect.points(vertex);
for(int index = 0; index < 4; index++)
{
cv::line(fittingMinAreaRectMat, vertex[index % 4], vertex[(index + 1) % 4], cv::Scalar(255, 0, 0), 2);
}
}
// 使用外部包围圆形(圆形就是最小了,不存在形变)
{
cv::Point2f center;
float radius;
cv::minEnclosingCircle(hullPoints, center, radius);
cv::circle(fittingMinAreaCircleMat, center, radius, cv::Scalar(0, 0, 0), 2);
}
// 使用外部椭圆拟合:至少要6个点
{
qDebug() << __FILE__ << __LINE__ << hullPoints.size();
if(hullPoints.size() >= 6)
{
cv::RotatedRect rotateRect = cv::fitEllipse(hullPoints);
cv::ellipse(fittingEllipseMat, rotateRect, cv::Scalar(0, 0, 0), 2);
}
}
// 使用多边形拟合
{
std::vector<cv::Point> polyPoints;
cv::approxPolyDP(hullPoints, polyPoints, 3, true);
std::vector<std::vector<cv::Point>> contour;
contour.push_back(polyPoints);
cv::drawContours(fittingPolyMat, contour, 0, cv::Scalar(0, 0, 0), 2);
}
}
// 效果图copy:轮廓图
mat = windowMat(cv::Range(srcMat.rows * 1, srcMat.rows * 2),
cv::Range(srcMat.cols * 2, srcMat.cols * 3));
cv::addWeighted(mat, 0.0f, emptyMat, 1.0f, 0.0f, mat);
// 效果图copy:对已知轮廓进行最大凸包检测
mat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3),
cv::Range(srcMat.cols * 0, srcMat.cols * 1));
cv::addWeighted(mat, 0.0f, dstMat, 1.0f, 0.0f, mat);
// 效果图copy:黑色图拟合矩形
mat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3),
cv::Range(srcMat.cols * 1, srcMat.cols * 2));
cv::addWeighted(mat, 0.0f, fittingRectMat, 1.0f, 0.0f, mat);
// 效果图copy:原图拟合矩形
mat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3),
cv::Range(srcMat.cols * 1, srcMat.cols * 2));
cv::addWeighted(mat, 0.0f, fittingRectMat, 1.0f, 0.0f, mat);
// 效果图copy:原图拟合最小矩形
mat = windowMat(cv::Range(srcMat.rows * 2, srcMat.rows * 3),
cv::Range(srcMat.cols * 2, srcMat.cols * 3));
cv::addWeighted(mat, 0.0f, fittingMinAreaRectMat, 1.0f, 0.0f, mat);
// 效果图copy:原图拟合最小圆形
mat = windowMat(cv::Range(srcMat.rows * 3, srcMat.rows * 4),
cv::Range(srcMat.cols * 0, srcMat.cols * 1));
cv::addWeighted(mat, 0.0f, fittingMinAreaCircleMat, 1.0f, 0.0f, mat);
// 效果图copy:原图拟合最小椭圆
mat = windowMat(cv::Range(srcMat.rows * 3, srcMat.rows * 4),
cv::Range(srcMat.cols * 1, srcMat.cols * 2));
cv::addWeighted(mat, 0.0f, fittingEllipseMat, 1.0f, 0.0f, mat);
// 效果图copy:原图拟合多边形
mat = windowMat(cv::Range(srcMat.rows * 3, srcMat.rows * 4),
cv::Range(srcMat.cols * 2, srcMat.cols * 3));
cv::addWeighted(mat, 0.0f, fittingPolyMat, 1.0f, 0.0f, mat);
}
}
// 更新
cvui::update();
// 显示
cv::imshow(windowName, windowMat);
// esc键退出
if(cv::waitKey(25) == 27)
{
break;
}
}
}
对应版本号v1.50.0
上一篇:《OpenCV开发笔记(五十五):红胖子8分钟带你深入了解Haar、LBP特征以及级联分类器识别过程(图文并茂+浅显易懂+程序源码)》
下一篇:《OpenCV开发笔记(五十七):红胖子8分钟带你深入了解直方图反向投影(图文并茂+浅显易懂+程序源码)》
原博主博客地址:https://blog.csdn.net/qq21497936
原博主博客导航:https://blog.csdn.net/qq21497936/article/details/102478062
本文章博客地址:https://blog.csdn.net/qq21497936/article/details/106180872