前面博客中的进程是程序执行和资源分配的基本单位。每个进程有自己的储存空间
而线程是进程内的基本调度单位,同一个进程内的所有线程共享一个进程的资源。
父子进程中并不共享内存,所以只能通过IPC的方式进行进程之间的信息交换
线程可以共享进程中的资源,但是要注意避免多个线程同时修改同一份信息,所以需要同步。
有线程的代码再编译的时候要手动链接库,在gcc 后面加上 -lpthread
线程的头文件 <pthread.h>
线程ID
就像进程一样,每个线程有自己的ID,通过这个函数获取调用者的ID
#include <pthread.h> pthread_t pthread_self(void);
返回值即为线程的ID,该函数不会失败。
返回值类型pthread_t 被定义为一个 unsigned long 所以打印要用%u,但其他实现中可能是一个结构体类型
#include <pthread.h> #include <stdio.h> #include <string.h> #include <stdlib.h> int main(int argc, char const *argv[]) { pthread_t id; id = pthread_self(); printf("%lu ",id); return 0; }
运行结果

这ID很长
可以使用下面函数来对比两个线程ID是否相同
#include <pthread.h>
int pthread_equal(pthread_t t1, pthread_t t2);
返回值为0表示两个ID不相等。
线程的创建
#include <pthread.h>
int pthread_create(pthread_t *thread, const pthread_attr_t *attr,
void *(*start_routine) (void *), void *arg);
thread 指想新进程的ID
attr 线程属性 , NULL默认值
start_routine 线程执行时调用的函数
arg 前面那个函数的参数
ptyread_create() 线程被创建后立即执行。
返回值:成功返回0,失败返回非0的错误码
终止线程
#include <pthread.h>
void pthread_exit(void *retval);
retval 可以用来传返回值
上面的是自己调用终止自己的线程,还有一个能杀死别人的线程的函数
int pthread_cancel(pthread_t thread);
这个容易出现意外,一般情况不使用。
试一下这两个函数
#include <pthread.h> #include <stdio.h> #include <string.h> #include <stdlib.h> #include <unistd.h> void firstPthread(void) { for (int i = 0; i < 10; ++i) { printf("firstPthread : %d ",i); sleep(1); } pthread_exit(NULL); } void secondPthread(void) { for (int i = 0; i < 10; ++i) { printf("secondPthread : %d ",i); sleep(1); } pthread_exit(NULL); } int main(int argc, char const *argv[]) { pthread_t id,id1,id2; int ret; id = pthread_self(); printf("%lu ",id); ret = pthread_create(&id1,NULL,(void*)firstPthread,NULL); if(ret != 0) { printf("firstPthread failed"); } ret = pthread_create(&id2,NULL,(void*)secondPthread,NULL); if(ret != 0) { printf("secondPthread failed"); } return 0; }
我运行了无数次,结果都不理想
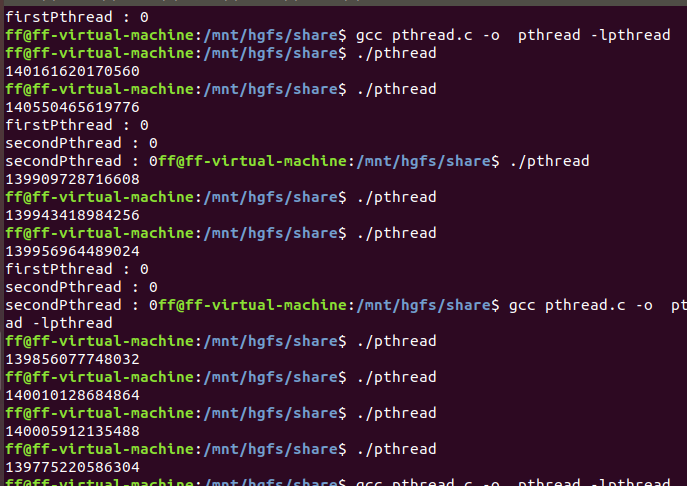
为什么?
仔细检查了所有代码。没有任何问题。
那么为什么连一句话都打不出来呢?甚至都不报错?
看下面的图
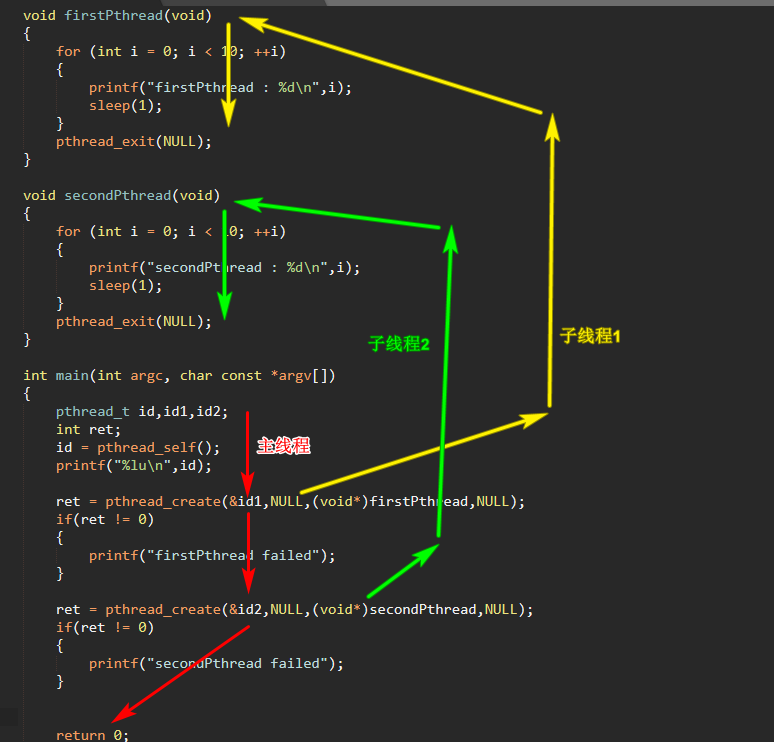
在主函数中有一个主线程在执行
当执行到firstPthread() 时,开启第一条子线程,
子线程执行的同时,主线程仍然继续执行,又碰到了第二个创建线程 secondPthread()
遂又开启了第二条线程函数,此时 主线程,子线程1,子线程2同时在运行。
然鹅,这个时候,主线程运行到了return 0 ; 主线程的生命即将终结。
可是两个子线程还没有运行完,但是主线程不管这么多,他要执行他的代码。
而当主线程结束的时候,一切都结束了。
所以我们就能看到上面测试过程中,有的时候能看的到子线程1或者子线程2执行了1次 2次。
他们抢在主线程死亡前。。发出了生命最后的呐喊,然后随着主线程一起香消玉殒。。。
既然知道了这个原理,我们就可以解决这个问题了,可以在主线程加一个延时函数,等到子线程结束,主线程再结束
int main(int argc, char const *argv[]) { pthread_t id,id1,id2; int ret; id = pthread_self(); printf("%lu ",id); ret = pthread_create(&id1,NULL,(void*)firstPthread,NULL); if(ret != 0) { printf("firstPthread failed"); } ret = pthread_create(&id2,NULL,(void*)secondPthread,NULL); if(ret != 0) { printf("secondPthread failed"); } sleep(20); return 0; }
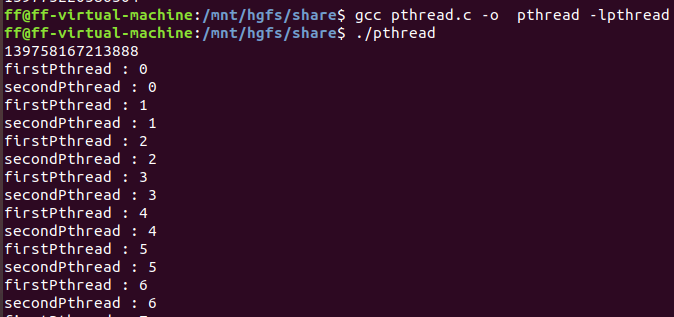
果然,这样程序就可以正常执行到主线程结束了
更多时候我们加一个线程等待函数
#include <pthread.h>
int pthread_join(pthread_t thread, void **retval);
thread 要等待的线程ID
retval 二级指针,用来储存被等待线程的返回值
创建线程时中有个参数
attr 如果填写NULL,则写入默认属性,默认是非分离属性。(分离:线程结束时资源会自动释放)
而NULL创建线程资源不会自动释放,所以需要手动调用用函数pthread_join(),来进行回收资源+等待的作用
可以调用这个函数将 非分离 的线程转化为 分离 线程
int pthread_detach(pthread_t thread);
传入要设置的线程的ID,返回值为0成功,非0失败。
加入后主函数代码如下:
int main(int argc, char const *argv[]) { pthread_t id,id1,id2; int ret; id = pthread_self(); printf("%lu ",id); ret = pthread_create(&id1,NULL,(void*)firstPthread,NULL); if(ret != 0) { printf("firstPthread failed"); } ret = pthread_create(&id2,NULL,(void*)secondPthread,NULL); if(ret != 0) { printf("secondPthread failed"); } pthread_join(id1,NULL); pthread_join(id2,NULL); return 0; }
接下来我们试一下传参和返回值
还是原来得代码,我把有改动的地方标记出来
#include <pthread.h> #include <stdio.h> #include <string.h> #include <stdlib.h> #include <unistd.h> void firstPthread(void *arg) { int *val = (int *)arg;//定义一个int型指针,接收传入的参数 int *sum = (int *)malloc(sizeof(int *));//在堆区申请一块空间用来保存返回值
//注意这里不能在栈上申请,因为局部变量在函数结束的时候被释放,到时候我们的返回值就消失了
//下面使用刚才传入的参数作为循环次数,同时对返回值进行累加 for (int i = 0; i < *val; ++i) { printf("firstPthread : %d ",i); sleep(1); sum[0]++; } printf("In firstPthread sum is :%d ", sum[0]);
//传出函数的返回值 pthread_exit(sum); } void secondPthread(void) { for (int i = 0; i < 4; ++i) { printf("secondPthread : %d ",i); sleep(1); } pthread_exit(NULL); } int main(int argc, char const *argv[]) { pthread_t id,id1,id2; int ret;
//在主函数中定义要传入的参数和返回值,因为返回值用二级指针承接,所以将其定义为void指针。 int val = 6; void *returnFirstPthread; id = pthread_self(); printf("%lu ",id);
//传入参数(的地址) ret = pthread_create(&id1,NULL,(void*)firstPthread,&val); if(ret != 0) { printf("firstPthread failed"); } ret = pthread_create(&id2,NULL,(void*)secondPthread,NULL); if(ret != 0) { printf("secondPthread failed"); } //使用指针的地址作为接收参数 pthread_join(id1,&returnFirstPthread); pthread_join(id2,NULL); printf("firstPthread return value :%d ", *(int *)returnFirstPthread); return 0; }
运行结果如下:
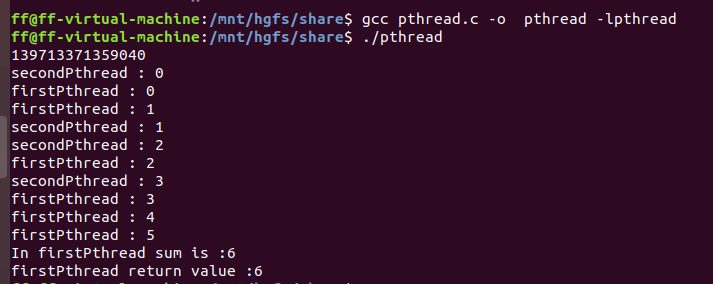
可以看出来我们的参数传递进去,返回值也成功传出来了。
我又写了一个试验,让三个进程同时操作一个常量,每操作一次 -1.小于1时返回
#include <pthread.h> #include <stdio.h> #include <string.h> #include <stdlib.h> #include <unistd.h> void a(void *arg) { int * sum = (int * )arg; if(*sum > 0) { printf("a --> %d ", sum[0]); sum[0] --; } pthread_exit(NULL); } void b(void * arg) { int * sum = (int * )arg; if(*sum > 0) { printf("b --> %d ", sum[0]); sum[0] --; } pthread_exit(NULL); } void c(void * arg) { int * sum = (int * )arg; if(*sum > 0) { printf("c --> %d ", sum[0]); sum[0] --; } pthread_exit(NULL); } int main(int argc, char const *argv[]) { int sum = 10; pthread_t id1,id2,id3; while(sum > 0) { pthread_create(&id1,NULL,(void *)a,&sum); pthread_create(&id2,NULL,(void *)b,&sum); pthread_create(&id3,NULL,(void *)c,&sum); } pthread_join(id1,NULL); pthread_join(id2,NULL); pthread_join(id3,NULL); exit(0); }
按照一贯的思路,应该是由abc分别打印出10987654321,然鹅,运行结果:
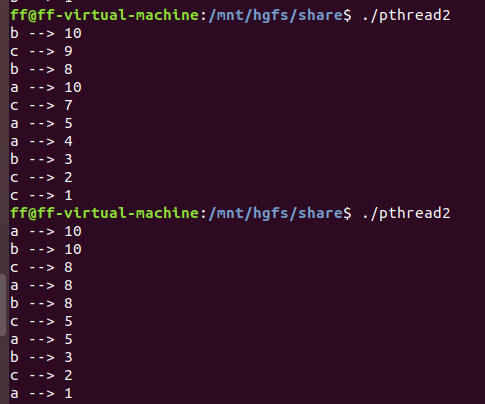
10被用了2次,到0的时候也没有立即返回。
其实原理和我们上面画的那个图类似,在第一个线程还没有返回的时候,第二个线程已经开始了他的表演。
这就造成了a,b都打出来了10的现象,后面也是相同的
这个时候,我可以采取一个办法保护我们主函数中的sum,同时只允许一个线程操作sum
那么我们就需要给这个变量上个锁。
每当一个线程要操作sum之前,先给他上锁,在使用完成之后再解锁,
在资源被锁住期间如果有其他线程想使用这个资源,那么就只能等待(阻塞),直到这个保护被取消,
那么同样的,接下来使用资源的线程也要用上锁解锁的方式去保护这个资源
这里我们就用到了互斥锁(互斥量)
如果linux中man手册搜不到下列函数,可以安装sudo apt-get install manpages-posix-dev
互斥锁创建、销毁
#include <pthread.h>
int pthread_mutex_destroy(pthread_mutex_t *mutex);
int pthread_mutex_init(pthread_mutex_t *restrict mutex,
const pthread_mutexattr_t *restrict attr);
mutex 只想需要初始化的互斥量的指针
attr 定义互斥锁的属性,如果填NULL 则设为默认值
互斥锁上锁、解锁、判断有锁
#include <pthread.h>
int pthread_mutex_lock(pthread_mutex_t *mutex);
int pthread_mutex_trylock(pthread_mutex_t *mutex);
int pthread_mutex_unlock(pthread_mutex_t *mutex);
参数同上
返回值同上
还用刚刚的例子,使用互斥锁打印sum的值
#include <pthread.h> #include <stdio.h> #include <string.h> #include <stdlib.h> #include <unistd.h>
//声明一个互斥锁 pthread_mutex_t lock; void a(void *arg) { int * sum = (int * )arg;
//在使用之前上锁 pthread_mutex_lock(&lock); if(*sum > 0) { printf("a --> %d ", sum[0]); sum[0] --; }
//解锁 pthread_mutex_unlock(&lock); pthread_exit(NULL); } void b(void * arg) { int * sum = (int * )arg; pthread_mutex_lock(&lock); if(*sum > 0) { printf("b --> %d ", sum[0]); sum[0] --; } pthread_mutex_unlock(&lock); pthread_exit(NULL); } void c(void * arg) { int * sum = (int * )arg; pthread_mutex_lock(&lock); if(*sum > 0) { printf("c --> %d ", sum[0]); sum[0] --; } pthread_mutex_unlock(&lock); pthread_exit(NULL); } int main(int argc, char const *argv[]) { int sum = 10; pthread_t id1,id2,id3; //创建一个互斥锁 if (pthread_mutex_init(&lock, NULL) != 0) { perror("lock init failed"); exit(-1); } while(sum > 0) { pthread_create(&id1,NULL,(void *)a,&sum); pthread_create(&id2,NULL,(void *)b,&sum); pthread_create(&id3,NULL,(void *)c,&sum); } pthread_join(id1,NULL); pthread_join(id2,NULL); pthread_join(id3,NULL); //进程即将结束,销毁互斥锁 pthread_mutex_destroy(&lock); exit(0); }
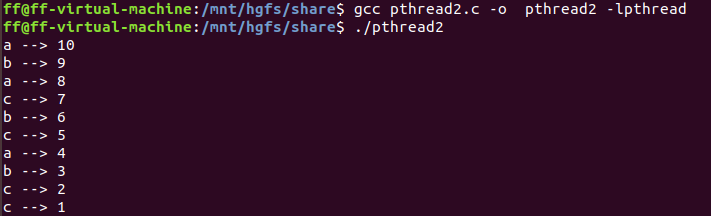
这样就可以顺利打印出来正确的数值了
使用互斥锁时要注意,避免在使用锁的过程中导致线程退出,那么就永远锁上了,别的线程无法获得已经死掉的线程的资源。
死锁
现在有2个线程,线程1和线程2,也有两把锁,锁A和锁B
如果进入到一个状态:在使用锁A的线程1在等待锁B,使用锁B的线程2在等待锁A,那么这两个线程都无法进行下去,就进入了一个死锁的状态。
产生死锁的必要条件:
1、互斥条件:进程要求对所分配的资源进行排它性控制,即在一段时间内某资源仅为一进程所占用。
2、请求和保持条件:当进程因请求资源而阻塞时,对已获得的资源保持不放。
3、不剥夺条件:进程已获得的资源在未使用完之前,不能剥夺,只能在使用完时由自己释放。
4、环路等待条件:在发生死锁时,必然存在一个进程--资源的环形链。
预防死锁:
1、设计获得锁的顺序
2、超时放弃
除了互斥锁之外,还可以用信号量来进行同步操作
在进程学习中就提到过信号量的知识这里我们再复习一下
信号量的原理就相当于一个计数器,先设定好一个最大的访问量。每当有人来访问,那么计数器-1.
当信号量为0的时候,不允许其他线程来访问了,所以只能进入阻塞状态等待资源的释放。
如果前面使用的人释放了这个资源,那么信号量+1,在排队的线程就可以获得使用的权限了。
上面讲的获取和释放资源的过程,就是P操作和V操作。
基本函数有下:
#include <semaphore.h>
int sem_init(sem_t *sem, int pshared, unsigned int value);//创建信号量 赋初值
int sem_wait(sem_t *sem);//阻塞申请信号量,申请成功信号量-1(P操作)
int sem_trywait(sem_t *sem);//非阻塞申请信号量,无论成功与否该函数会立即返回
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);//计时申请信号量,会阻塞
int sem_post(sem_t *sem);//发送信号量(信号量+1)(V操作)
int sem_getvalue(sem_t *sem, int *sval);//获取信号量的值
int sem_destroy(sem_t *sem);//销毁信号量(不能再有线程申请信号量时销毁)
sem 信号量指针
pshared 0
value 信号量初始值
abs_timeout 唤醒的绝对时间
struct timespec{
time_t tv_sec; //秒
long tv_nsec; //纳秒
}
sval 储存信号量的值的地址
还是刚才的例子,我们用信号量操作一遍。。。
#include <pthread.h> #include <stdio.h> #include <unistd.h> #include <stdlib.h> #include <string.h> #include <semaphore.h>
//声明一个信号量 sem_t sem; void firstPthread(void *arg) { sem_wait(&sem);//阻塞等待信号量 请求成功后,信号量值-1 .等同于上锁 int *sum = (int *)arg; if(*sum > 0) { printf("firstPthread : %d ", sum[0]); sum[0]--; } sem_post(&sem);//释放,信号量+1,等同于解锁 pthread_exit(NULL); } void secondPthread(void *arg) { sem_wait(&sem); int *sum = (int *)arg; if(*sum > 0) { printf("secondPthread : %d ", sum[0]); sum[0]--; } sem_post(&sem); pthread_exit(NULL); } void thridPthread(void *arg) { sem_wait(&sem); int *sum = (int *)arg; if(*sum > 0) { printf("thridPthread : %d ", sum[0]); sum[0]--; } sem_post(&sem); pthread_exit(NULL); } int main(int argc, char const *argv[]) { int sum = 10; int ret = 0; pthread_t id1,id2,id3; //初始化(二值)信号量 ret = sem_init(&sem,0,1); if(ret != 0) { perror("sem_init"); } while(sum > 0) { pthread_create(&id1,NULL,(void *)firstPthread,&sum); pthread_create(&id2,NULL,(void *)secondPthread,&sum); pthread_create(&id3,NULL,(void *)thridPthread,&sum); } pthread_join(id1,NULL); pthread_join(id2,NULL); pthread_join(id3,NULL); //销毁信号量 sem_destroy(&sem); return 0; }
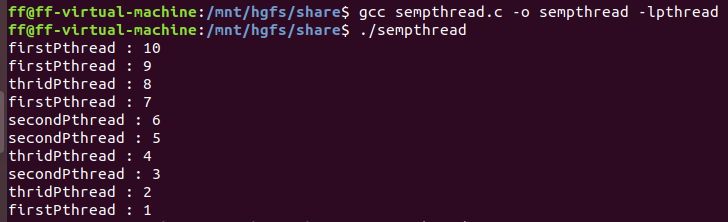
运行结果:
刚才的例子中我们只有一个资源sum = 10,当他减少到0的时候,子线程全部结束,进程结束。
那么如果我现在想让他在sum == 0 的时候再次续命,此时重新赋值让sum = 10;
那么该如何操作呢?
这个时候就用到了条件变量
使用起来也和前面的同步差不多,创建、销毁、等待、通知。
常用函数如下:
//动态创建条件变量 int pthread_cond_init(pthread_cond_t *restrict cond, const pthread_condattr_t *restrict attr);
//注销条件变量 int pthread_cond_destroy(pthread_cond_t *cond);
//无条件等待,条件不满足时调用等待函数来等待条件满足,传参分别为条件变量和互斥锁 int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex);
//计时等待 int pthread_cond_timedwait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex, const struct timespec *restrict abstime);
//广播条件变量成立信号,激活等待中的所有线程 int pthread_cond_broadcast(pthread_cond_t *cond);
//发送单个条件变量成立信号,激活等待状态的一个线程 int pthread_cond_signal(pthread_cond_t *cond);
cond 条件变量的指针
attr 创建条件变量的属性,NULL默认值
mutex 互斥锁指针
abstime 唤醒的绝对时间 (timespec结构体在上文有表述)
成功返回 0 失败返回 非0
还是前面的例子,我们用条件变量让sum == 10 的时候触发
#include <pthread.h> #include <stdio.h> #include <string.h> #include <stdlib.h> #include <unistd.h> //互斥锁 pthread_mutex_t lock; //条件变量 pthread_cond_t cond; void a(void *arg) { int * sum = (int * )arg; //上锁 pthread_mutex_lock(&lock); if(*sum > 0) { printf("a --> %d ", sum[0]); sum[0] --; //解锁 pthread_mutex_unlock(&lock); } else { //先解锁 pthread_mutex_unlock(&lock); //发送通知 pthread_cond_signal(&cond); printf("send cond signal a "); sleep(1); } pthread_exit(NULL); } void b(void * arg) { int * sum = (int * )arg; pthread_mutex_lock(&lock); if(*sum > 0) { printf("b --> %d ", sum[0]); sum[0] --; pthread_mutex_unlock(&lock); } else { pthread_mutex_unlock(&lock); pthread_cond_signal(&cond); printf("send cond signal b "); sleep(1); } pthread_exit(NULL); } void c(void * arg) { int * sum = (int * )arg; pthread_mutex_lock(&lock); if(*sum > 0) { printf("c --> %d ", sum[0]); sum[0] --; pthread_mutex_unlock(&lock); } else { pthread_mutex_unlock(&lock); pthread_cond_signal(&cond); printf("send cond signal c "); sleep(1); } pthread_exit(NULL); } //等待条件线程 //作用即为等待接收sign void waitPthread(void *arg) { //操作资源前要上锁 pthread_mutex_lock(&lock); int * sum = (int *)arg; if(sum[0] > 0) { //在满足条件的情况下进入等待(挂起)状态 pthread_cond_wait(&cond,&lock); } sum[0] = 10; //操作结束要解锁 pthread_mutex_unlock(&lock); pthread_exit(NULL); } int main(int argc, char const *argv[]) { int sum = 10; pthread_t id1,id2,id3,id4; //初始化互斥锁 if (pthread_mutex_init(&lock, NULL) != 0) { perror("lock init failed"); exit(-1); } //初始化条件变量 if (pthread_cond_init(&cond, NULL) != 0) { perror("cond init failed"); exit(-1); } //创建等待线程 pthread_create(&id4,NULL,(void *)waitPthread,&sum); while(sum > 0) { pthread_create(&id1,NULL,(void *)a,&sum); pthread_create(&id2,NULL,(void *)b,&sum); pthread_create(&id3,NULL,(void *)c,&sum); } pthread_join(id1,NULL); pthread_join(id2,NULL); pthread_join(id3,NULL); pthread_join(id4,NULL); //销毁互斥锁 pthread_mutex_destroy(&lock); //销毁条件变量 pthread_cond_destroy(&cond); exit(0); }
运行结果如下:
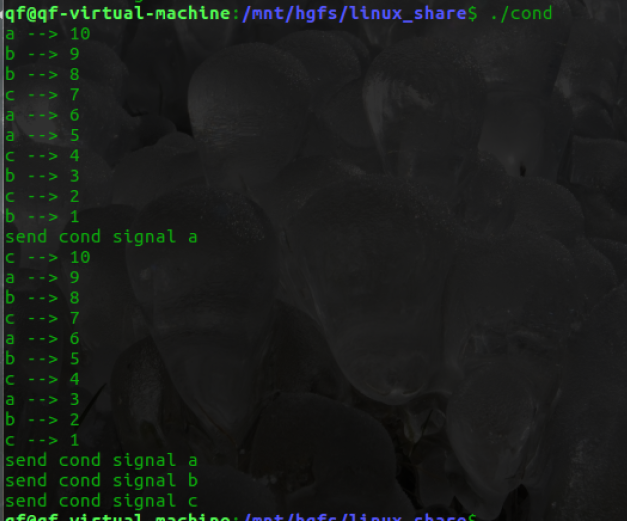
我们画图来解释一下这个过程:
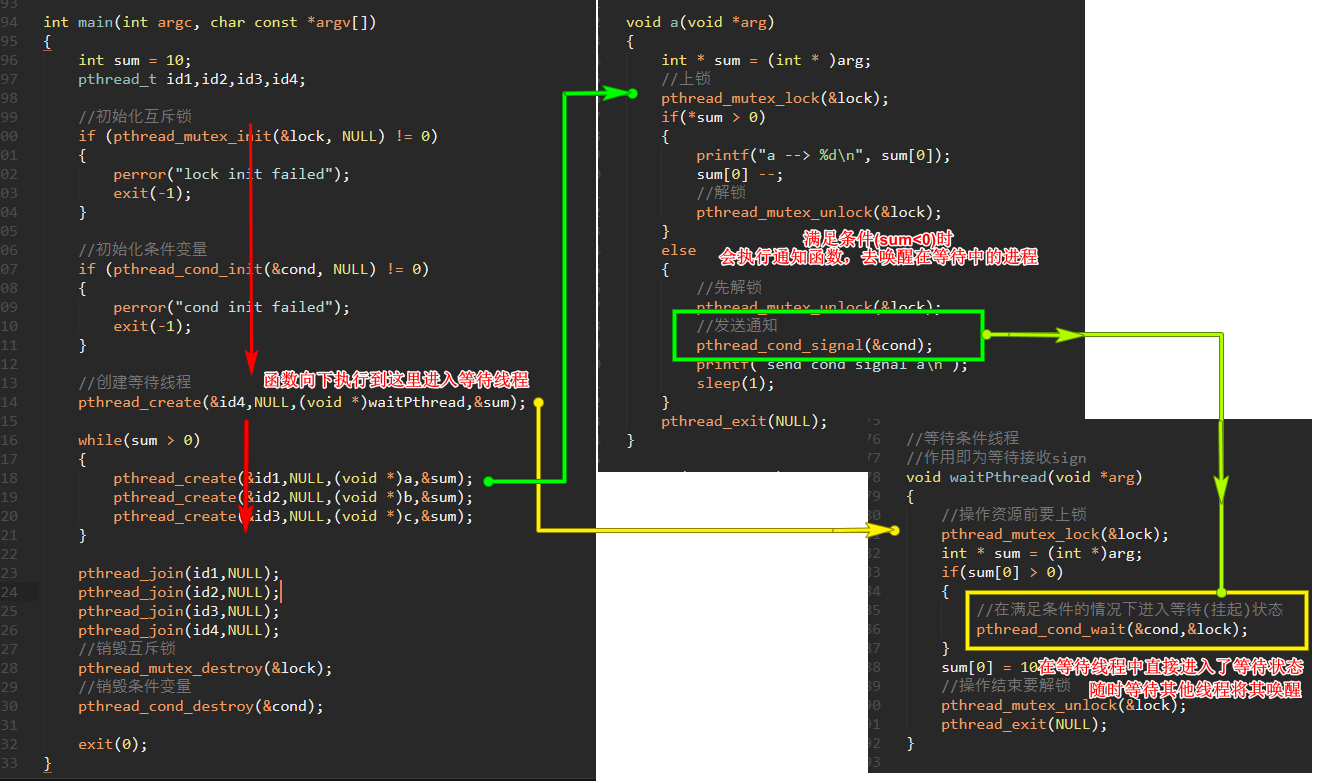
一步步分解一下他的运行状态:
1、执行主线程,包括初始化函数
2、执行等待线程,此时满足条件,所以进入等待状态。
3、执行abc子线程,当sum>0时打印输出
4、当sum<0 时,(图例中)由a线程发出了一个通知,唤醒了等待线程
5、等待线程启动,将sum重置为10,同时结束了自己年轻的生命
6、abc子线程继续打印输出
7、sum又一次 小于0,此时abc子线程都发出了通知,但是等待线程已死。。。
8、回收子线程,销毁通信资源。进程结束。