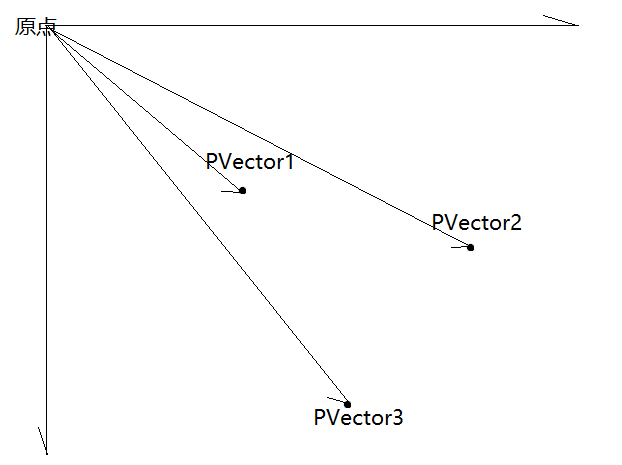
问题:在processing 平台,通过给定三个PVector向量,如何求他们之间的夹角,同时确定是在左侧还是右侧?
如图所示,在processing 平台中,PVector表示点的坐标是以原点为起点的向量:
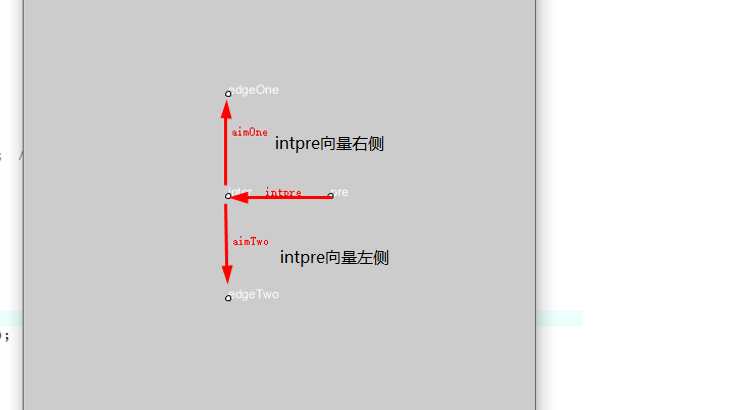
假定有四个点向量PVector,即为:edgeOne, edgeTwo, inter, pre
三个方向向量(通过向量之间的坐标加减得到), 即为:aimOne, aimTwo, intpre
则:
向量aimOne 和 intpre 之间的夹角和方向是多少?
向量aimTwo 和 intpre 之间的夹角和方向是多少?
方法:直接调用以下函数即可:
float getAngle(PVector pre1, PVector middle, PVector next) {
// calc PVector
PVector pre = new PVector(pre1.x, pre1.y);
PVector inter = new PVector(middle.x, middle.y);
PVector edgeOne = new PVector(next.x, next.y);
PVector aimOne = edgeOne.sub(inter);
PVector intpre = inter.sub(pre); // change inter
float deviationAngle = atan2(intpre.y, intpre.x) - atan2(aimOne.y, aimOne.x);
if ( deviationAngle > PI ) {
deviationAngle -= TWO_PI;
} else if (deviationAngle < -PI) {
deviationAngle += TWO_PI;
}
return degrees(deviationAngle);
}
getAngle(pre, inter, edgeOne);
getAngle(pre, inter, edgeTwo);
说明:
此函数将角度值转换为[-180, 180], 右侧